 國內主流主機廠的下一代電子電氣架構匯總
國內主流主機廠的下一代電子電氣架構匯總
在車輛的電子電氣架構方面,特斯拉是引領者也是全面變革者,早在2012年 Model S有較為明顯的功能域劃分,包括動力域、底盤域、車身域, ADAS模塊,到2017 年特斯拉又在Model3 突破了功能域的框架,實現了中央計算+區域控制器框架。
這兩年,國內各個主機廠也在各家的技術日公開了自家的下一代電子電氣架構。到目前為止,基本上國內主流主機廠的下一代電子電氣架構都公布了,今天正好來對其做個梳理。
01.
小鵬
從小鵬成立至今,電子電氣架構經歷過三代的迭代,如圖1所示首先2018年G3上是傳統的分布式架構,到2021年P7上是域控架構,如圖2所示,在G3的分布式架構基礎上,進行跨域整合,分層域控。分層域控是指功能域控制器( 智駕域控制器、車身域控制器)與中央域控制器并存,跨域整合是在分布式架構的基礎上將部分控制器功能進行整合,混合設計是指傳統的面向信號的交互和面向服務的交互并存。

▲圖1 小鵬電子電氣架構迭代
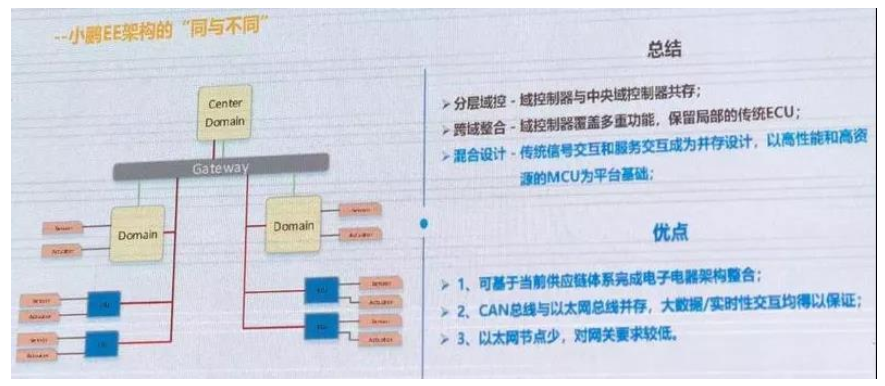
▲圖2小鵬P7的域控架構
小鵬最新的電子電氣架構名叫X-EEA3.0,如圖3所示,已經在不久前的發布的G9上搭載了。在硬件架構方面,采用了中央超算(C-DCU)加區域控制的架構,其中中央超算負責車控、智駕、座艙三大功能,區域控制器分為左右兩個,將更多控制件分區,并且根據就近配置原則,分區接管相應功能,大幅縮減線束。
在域控內部,對各個功能進行的內存分區,軟件升級互不干涉,30分鐘內可以完成升級,并且可以做到無感升級,可以邊開邊升級。
在通信架構方面, X-EEA3.0采用千兆以太網為主干的通信架構,支持以大量數據傳輸為基礎的高級別自動駕駛、智能座艙、OTA 等智能功能。同時支持多通訊協議。
在電力架構方面,可實現場景式精準配電,可根據不同用車場景按需配電, 比如在路邊等人時,可以只對空調、座椅調節、音樂等功能供電,其他部分斷電,這樣就能節能耗,提高續航里程。車輛定期自診斷,主動發現問題,引導維修,以科技手段賦能售后。
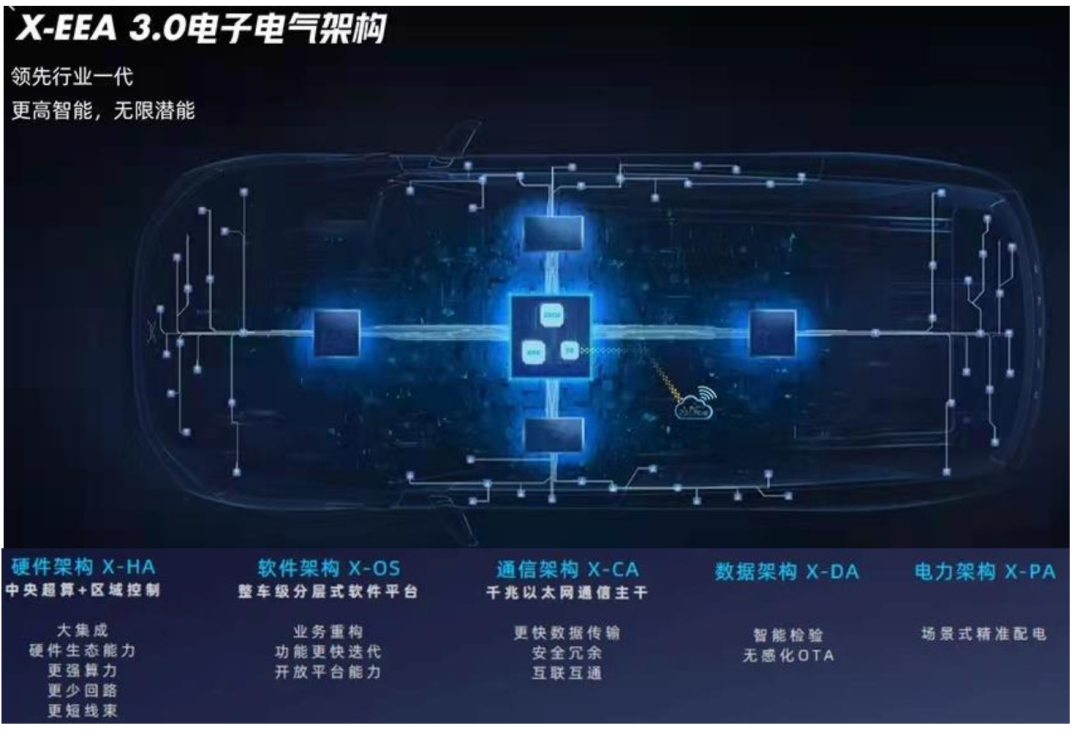
▲圖3 小鵬X-EEA3.0架構
02.
蔚來
關于蔚來的電子電氣架構信息,只在上次的演講上聽到過他們下一代的一些信息,下一代蔚來的選擇是區域控制器架構,整個系統由中央計算單元、四個區域控制器和高速以太網構建基本骨架,通過三者的協同,構建自適應、自學習系統,并且提供廣泛的智能互聯功能。
由于蔚來資料管的很嚴,資料的原圖就不能展示了,貼個類似的圖,環形拓撲,支持Fail-operational的雙冗余系統,具有良好擴展性。
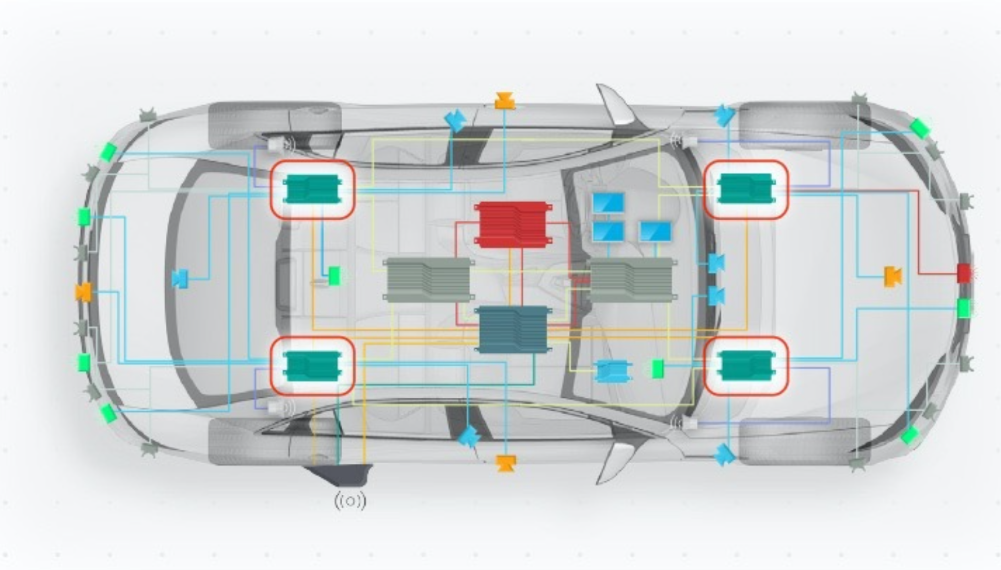
▲圖4 蔚來的下一代電子電氣架構(示意圖)
其中中央計算單元在性能上擁有1000TOPS以上的算力,主頻大于1GHz。結合之前英偉達的官網信息,中央計算單元的主控是英偉達的Orin芯片,而且是由現有的Adam超算平臺迭代過來的。
▲圖5英偉達官方平臺信息
因為在最新的ES7上將搭載蔚來的Aquila 蔚來超感系統。該系統中有一個Adam超算平臺。該平臺的由四個 DRIVE Orin 系統級芯片(SoC)構成,所提供的超過 1000 TOPS 的算力,前兩個系統級芯片負責處理車輛傳感器組每秒產生的 8 千兆字節數據。第三個 Orin 作為備份,確保系統能夠在任何情況下安全運行。第四個 Orin 支持本地訓練,通過車隊學習改進車輛并根據個人用戶的喜好實現駕駛體驗的個性化。
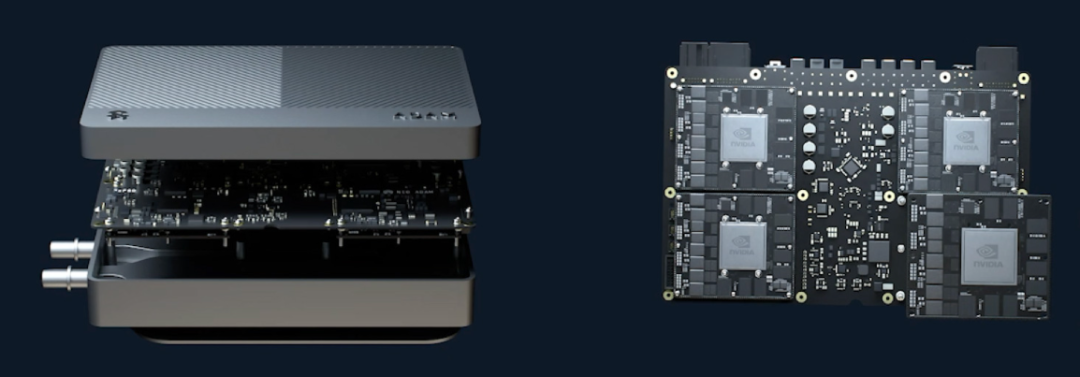
圖5蔚來的adam超算平臺
Adam超算平臺可以驅動各種智能功能并留出足夠的裕量用于在未來通過 OTA 增加新功能。
對于區域控制器而言,其是一個支持中央計算平臺的汽車小腦系統,其功能是:
1.分布式邊緣計算框架;
2.車控仲裁中心;
3.面向服務通信的信息通信網絡;
4.區域集中式數據中心;
5.整車配電樞紐;
6.獲取智能傳感器的數據和控制智能執行器的行為;
為了實現上述的功能,以及實現上面提到的平臺化、高內聚低耦合、高重用性、靈活部署的特性,軟件必須是面向服務的架構、廣泛的采用中間件(SOME/IP、DDS等)。
這就需要對現有的軟件架構進行重構,首先是引入遠程調用方式(RPC),這也是SOA思想的核心,第二需要對傳統常用的是本地調用方式(LPC)進行重構(這種方式是函數的本地調用、沒有統一的機制和標準),比如統一RPC與LPC的接口,讓LPC模擬Method、Request/Responce、Fire/Forget、Event等通信方式,實現服務對下層無感調用。
另外由于區域控制器的資源有限,為了實現跨域功能融合、跨域功能隔離。蔚來的方法是在區域控制器上采用AMP多核架構,AMP 模式的 RTOS 在各個 CPU 上均運行一個操作系統實例,這些操作實例不一定完全相同。
這樣方式具有不需要MMU、運行開銷小,支持不同功能安全等級的系統融合的特性,但是也帶來了一些挑戰,比如核心的負載沒有統一的管理、多核通信機制開銷、不同核心之間的啟動時序難以管理等。這種工程技術問題隨著經驗和時間的積累,肯定是沒問題的,況且蔚來已有自研域控制的經驗積累,
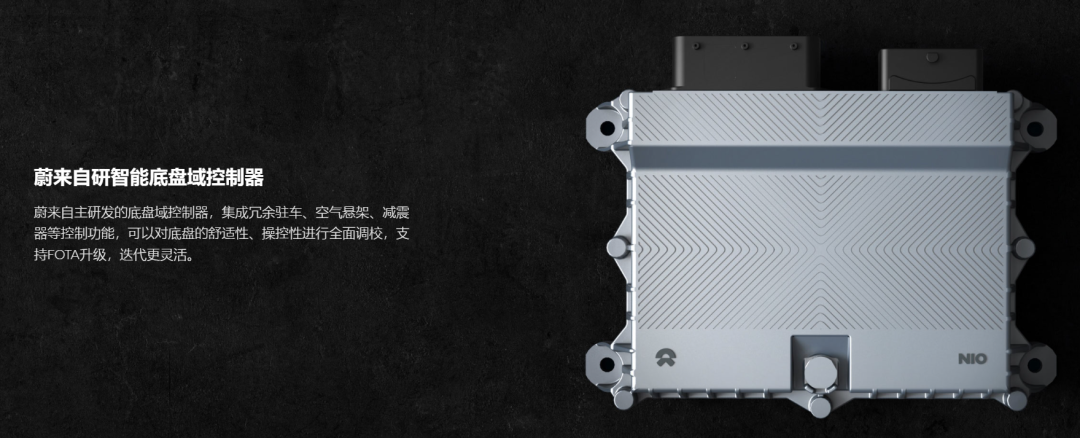
▲圖6 蔚來ES8上自研底盤域控制器
03.
理想
理想的電子電氣架構發展分三步走,從分布式架構開始,過渡到域控架構,再到重要中央計算單元架構,如圖8所示。
分布式架構主要應用在理想ONE,主要圍繞NOA自動駕駛控制器和 HU智能座艙控制器展開。
▲圖8理想EEA發展
域控制器架構將搭載在L9車型上,整車分為三個控制域:中央控制域控制器、自動駕駛域控制器、智能座艙域控制器。中央控制域控制器(如圖9所示)包含動力、車身、部分底盤的功能,主要融合了車身控制器和中央網關,主控芯片為恩智浦最新的S32G車規級芯片,并且部硬件、系統、軟件的均為理想研發。

▲圖9 L9的中央域控制器
另外自動駕駛控制域是基于主流的的英偉達Orion來構建的,并且使用了兩片orin芯片,智能座艙域控制器是基于高通的8155構建的,也使用了兩片。
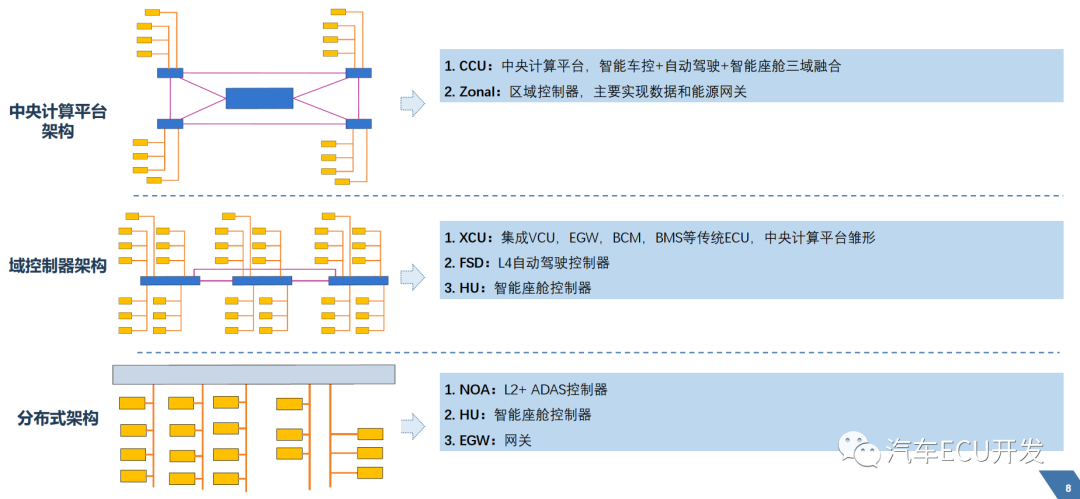
理想的域控架構之后的下一代就是中央計算平臺+區域控制器架構,并且會加入800V快充技術。中央計算平臺(CCU)與特斯拉FSD的思路一樣,將智能座艙控制和自動駕駛控制,以及車輛控制融合到一個控制器中,但是目前還不清楚是各個功能分離成不同的PCB板,還是全部融合到一塊PCB板上。
CCU的功能架構如圖10所示,CCU將車輛控制、自動駕駛、智能座艙多域融合,硬件資源共享,數據實時共享。在硬件上采用各領域內最先進的芯片,并通過高帶寬低時延Switch級聯,實現算力擴展和多域融合;軟件方面具有高安全,硬實時OS, 中間件及應用運行環境,軟件的性能參數如圖11所示,具有延時低、高算力等特點。
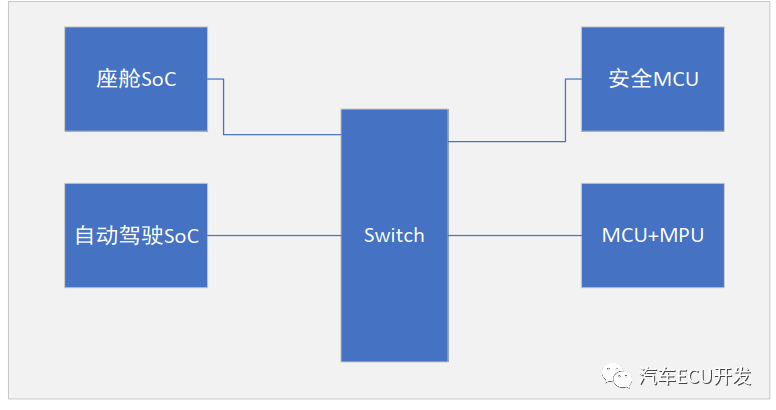
▲圖10CCU的內部功能架構

▲圖11CCU內部軟件的性能參數
區域控制器主要實現數據和能源網關的功能,實現減少線束、能源智能化管理、控制器軟件化,以及實現SOA,軟硬件解耦、控制IO虛擬化、服務化。通過若干個區域控制器和CCU實現環網架構。
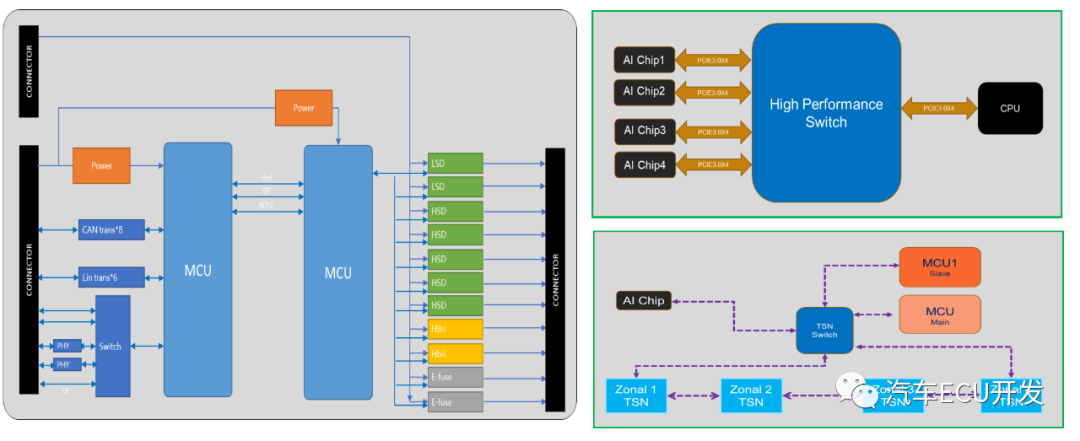
▲圖12區域控制器內部簡圖
區域控制器的內部硬件簡圖如圖8所示。從圖12來看區域控制器應該是基于域控架構中使用的NXP S32G的迭代,具有高低邊開關、E-fuse等控制,在通信方面有8路CAN、6路Lin和2路以太網。
PCIe網關可以滿足滿足算力芯片之間的實時大數據交互;解決高帶寬、低延時的痛點需求,實現任意端到端之間的數據傳輸帶寬在20Gb/s以上,并且具備物理隔離。
TSN網關具備CAN/CANFD/LIN到以太網的雙向協議轉換功能,可以實現TSN協議中的NC/EE/BE不同優先級數據流轉發和數據交換。
除了架構的升級外,在OS自研,軟件自研方面,理想也有布局。為了實現對客戶的需求進行快速響應,并且可以進行算力資源優化來提升用戶體驗,另外也是為了抓住軟件定義汽車時代的汽車靈魂。
▲圖13 理想的軟件自研規劃
03.
廣汽埃安
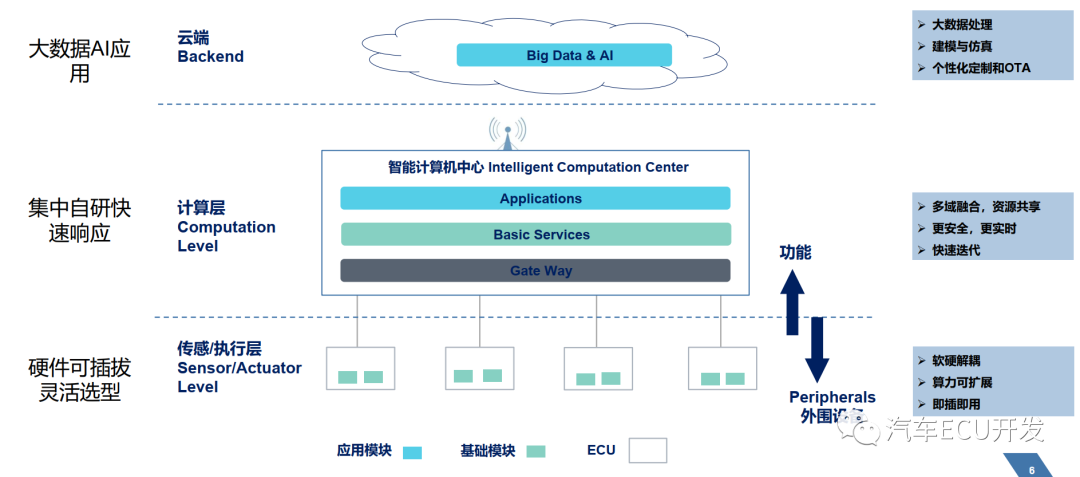
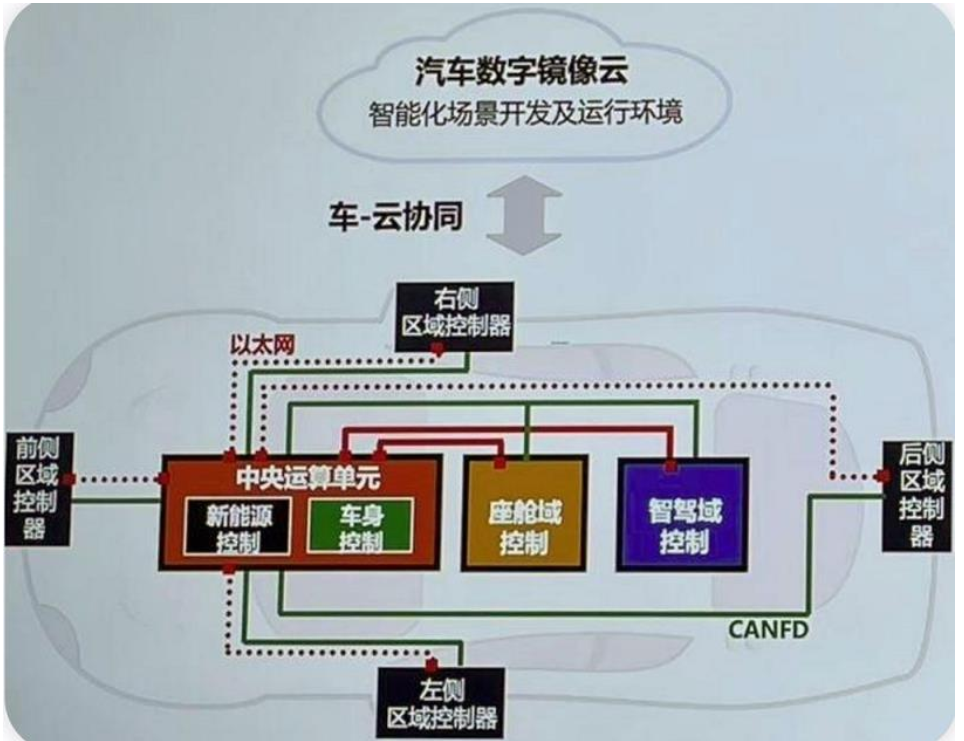
廣汽埃安的下一代電子電氣架構名叫星靈電子電氣架構,由中央計算機、智能駕駛計算機、信息娛樂計算機三個核心計算機群組,以及四個區域控制器組成,集成了千兆以太網、 5G和信息安全、功能安全等技術。
▲圖14廣汽的星靈電子電氣架構
從圖14可以看出,中央運算單元主要負責動力控制和車身控制,其主控芯片為NXP S32G39,座艙域控制器采用的是高通的8155/8295芯片,智駕域控制器采用的是華為的昇騰 610高性能芯片,算力最高可達 400TOPS。分布于車身前后左右的 4個區域控制器主要負責供電以及執行中央控制單元的指令,中央計算單元與四個區域控制器之間采用以太網連接。

▲圖15 三大域控制器
在軟件結構方面,星靈架構采用了 SOA 軟件架構以取代傳統軟件架構,以實現組件服務化、原子化和標準化,新增應用模塊即可實現新場景。
04.
長城
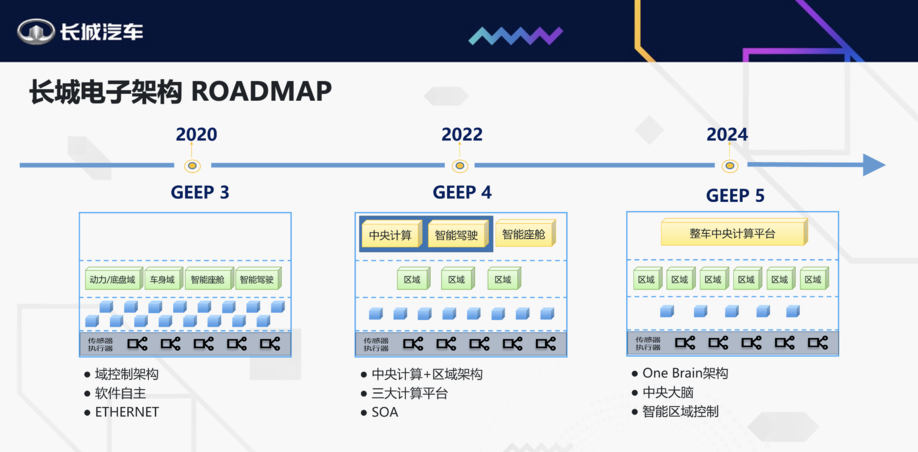
在2020年,長城汽車開發了GEEP3.0的域控架構,涵蓋車身控制、動力底盤、智能座艙、智能駕駛4個域控制器,并且目前已經應用到各個車型上了。
▲圖16長城汽車的EEA架構發展
GEEP 3.0之后是GEEP 4.0,GEEP 4.0將整車軟、硬件高度整合,其由中央計算、智能座艙及高階自動駕駛 3個計算平臺,外加 3個區域控制器(左、右、前)。
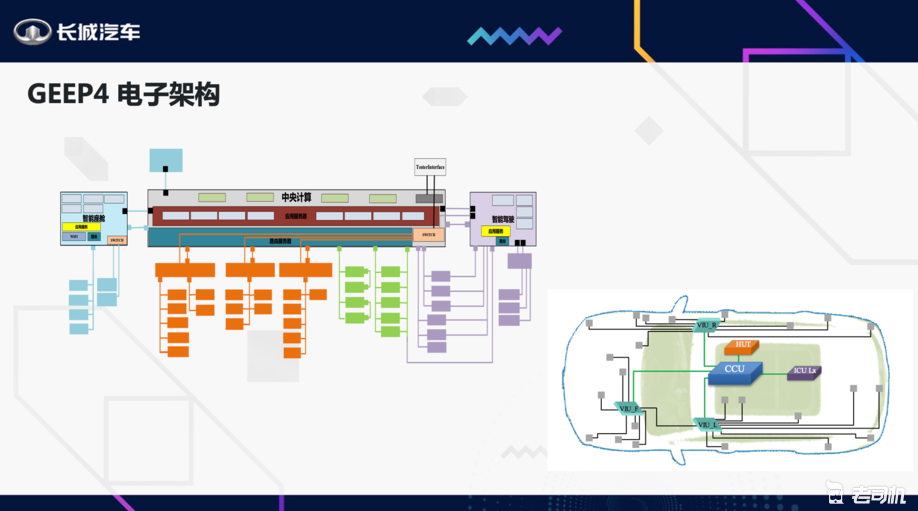
▲圖17GEEP4.0
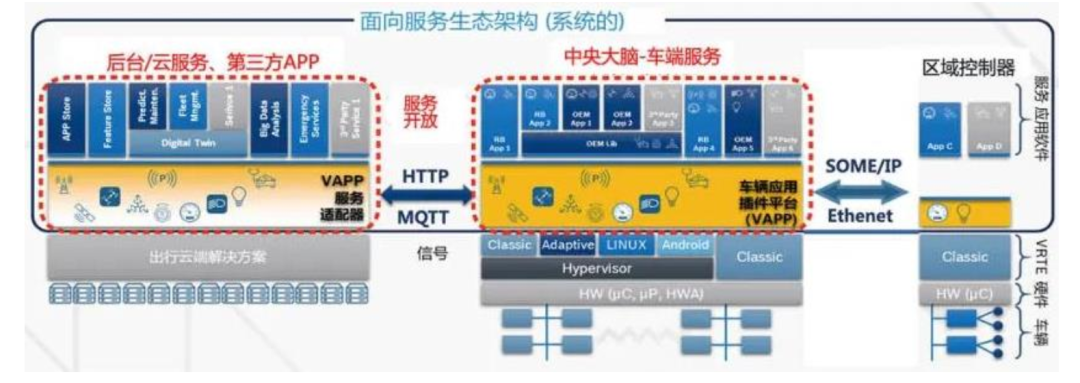
該架構采用SOA設計理念,開放標準API接口,實現功能可擴展,全面滿足用戶智能化需求。另外可以支持整車級的OTA升級能力,包含動力底盤系統、影音娛樂系統、車身系統、智能駕駛系統等。

▲圖18GEEP4.0的SOA架構設計概念
GEEP5.0由一個中央大腦( one brain)以及五個區域控制器組成,計劃2024 年面世。將實現 100%SOA 化,完成整車標準化軟件平臺的搭建。
▲圖19GEEP5.0架構
05.
比亞迪
比亞迪最新的E3.0平臺上將采用其最新的域控制器架構,其中包括智能動力域、智能車控域、智能座艙域和智能駕駛域四大域控。
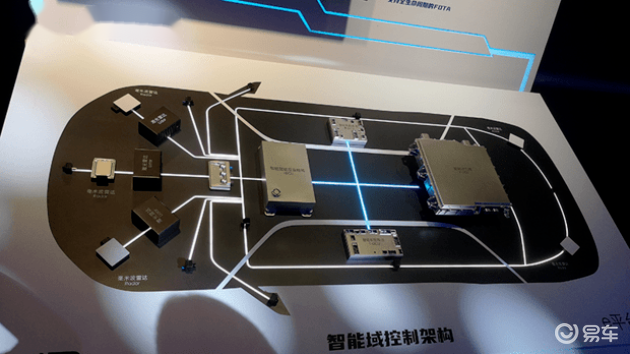
▲圖20比亞迪的智能域控架構
智能動力域控制器是指八合一總成的控制器,其整合了整車控制器、電池管理器、電機控制器、車載充電器等。
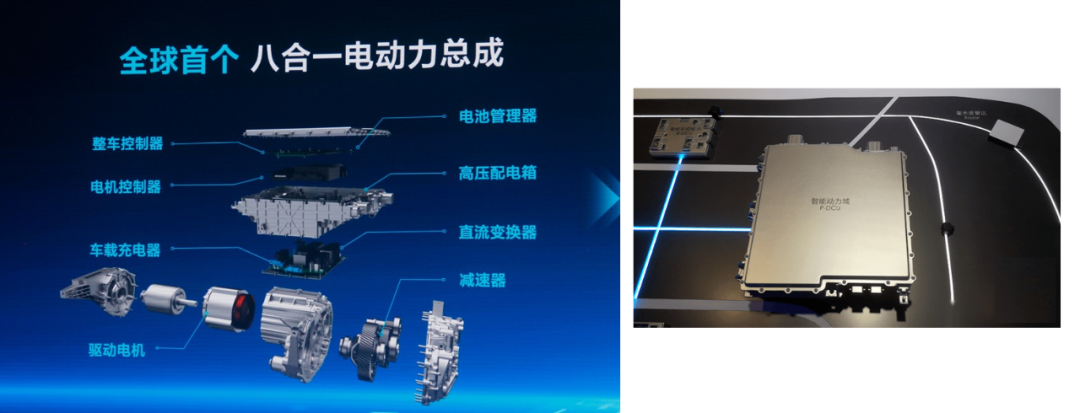
▲圖21比亞迪的智能動力域
在智能座艙域,比亞迪自主研發了軟硬件解耦的車用操作系統BYD OS,能夠實現硬件即插即用,軟件跨平臺通用;使智能電動汽車常用常新。

▲圖22 BYD OS
06.
上汽零束
全棧1.0電子電氣架構搭載在目前上汽旗下高端純電智能車品牌智己、飛凡車型上,全棧1.0架構共有三個域控制器,即中央計算(車控及數據融合)、智能駕駛、智能座艙,同時還保留了較多的分布式模塊。
2021年零束啟動全棧3.0架構的研發,進行進一步的集中化,其兩個高性能計算單元,即 HPC1和 HPC2來實現智能駕駛、智能座艙、智能計算、智能駕駛備份功能,再加 4個區域控制器, 實現各自不同區域的相關功能。
底層狹義操作系統由異構升級為同構;骨干通信帶寬擴容至千兆甚至萬兆;支持云、管、端智能車網絡安全防護體系,并且可以加速智能車自學習、 自成長和自進化。
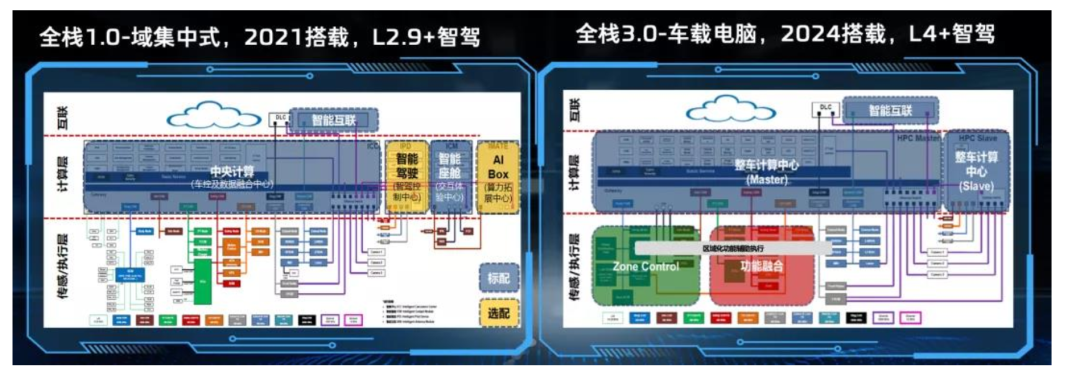
▲圖23上汽零束全棧1.0和全棧3.0
07.
總結
以上梳理了國內新勢力與傳統主機廠最新的電子電氣架構,基本都是中央計算單元+區域控制器的架構,但是自信看一下,可以發現,新勢力的步子邁的比較大,而傳統主機廠還是相對保守,雖然大家都叫中央計算單元加區域控制器架構,但是新勢力采用的基本是一個中央計算單元,來融合智能駕駛和智能座艙的功能,而傳統主機廠基本是都是中央計算群組,分別為智駕、座艙和車控。
審核編輯 :李倩
-
架構
+關注
關注
1文章
509瀏覽量
25447 -
EEA
+關注
關注
0文章
13瀏覽量
2675
原文標題:國內主機整車EEA架構匯總
文章出處:【微信號:eng2mot,微信公眾號:汽車ECU開發】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
意法半導體下一代汽車微控制器的戰略部署
西門子EDA發布下一代電子系統設計平臺

主流芯片架構包括哪些類型
24芯M16插頭在下一代技術中的潛力

使用NVIDIA Holoscan for Media構建下一代直播媒體應用
港燈打造了面向未來的下一代電力數據中心網絡
臺達推出提高人工智能服務器和數據中心能效的下一代電源解決方案
英偉達的下一代AI芯片

全新潛力:金剛石作為下一代半導體的角逐者
DesignCon2024 | 芯和半導體發布針對下一代電子系統的“SI/PI/多物理場分析”EDA解決方案






 工商網監
工商網監
評論