 機械臂在教育醫療領域的應用
機械臂在教育醫療領域的應用
機械臂是機器人技術領域中得到最廣泛實際應用的自動化機械裝置,在教育科研、商業應用、醫療健康等領域都能見到它的身影。
盡管它們的形態各有不同,但它們都有一個共同的特點,就是能夠接受指令,精確地定位到三維(或二維)空間上的某一點進行作業。
在教育醫療領域,機械臂可以分發口罩、全自動移液、為運動與語言障礙者傳輸指令等。
1
分發口罩
印度尼西亞北蘇門答臘大學計算機科學和信息技術學院研究使用機械臂分發口罩。
新冠病毒傳播迅猛,為了幫助減少工作人員因接觸造成的感染風險,海外用戶使用myCobot對過往人員進行口罩佩戴識別,對于未佩戴口罩相關人員進行分發口罩,并且已經把相關的應用撰寫成論文。
臉部識別過程使用opencv的Haar Cascade Classifier 算法以及svm分類檢測人員是否有帶口罩,對于被檢測為未佩戴口罩的人員,myCobot 280 Pi 將會用吸泵吸取一個口罩發放給用戶。
myCobot 280 Pi是桌面級六軸協作機械臂,采用樹莓派微處理器,內置ubuntu18.04系統,無需搭配PC主控,鏈接外設,即可快速構建機械臂應用場景。
2
基于眼動追蹤的機械臂控制系統
東南大學研究團隊利用眼動技術開發了一種基于眼動追蹤的非侵入式機械臂控制系統。
有嚴重語言和運動障礙的人,由于無法有效的控制肌肉的移動,可能存在與外部世界溝通困難的情況。
在本研究中,開發了一種基于眼動追蹤的非侵入式機械臂控制系統。在充分考慮機械臂的空間特性后,進行了以用戶為中心的設計過程,其中包含八個命令和一個中間實時視頻傳輸用戶界面。
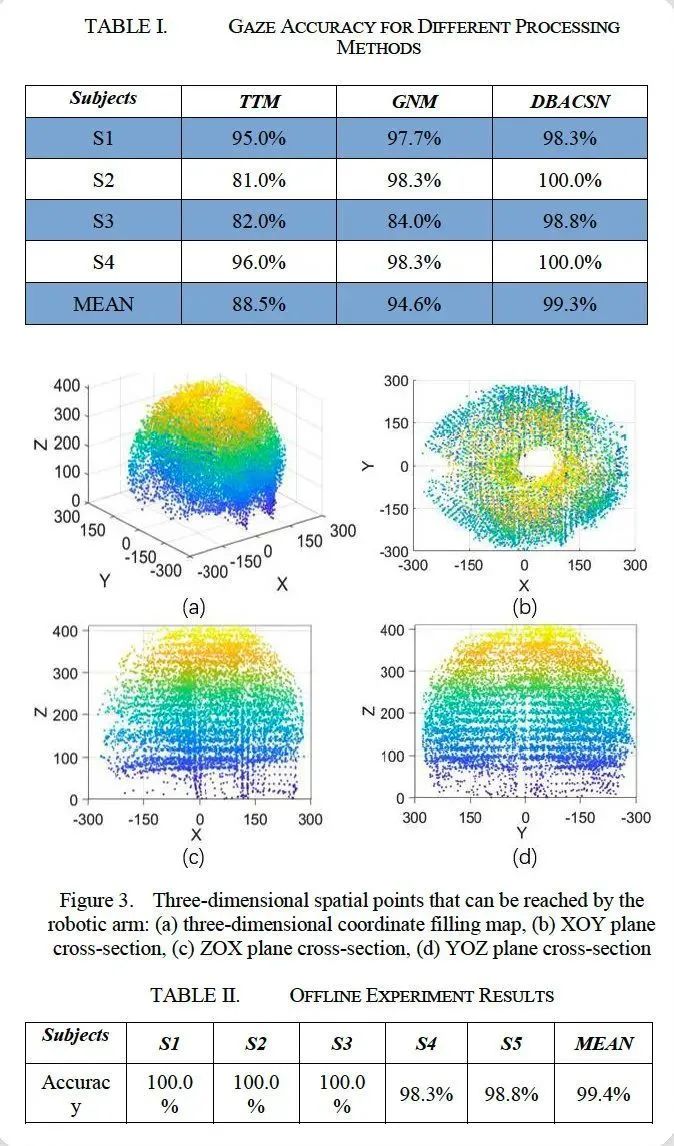
此外,評估了三種眼動注視點處理算法。其中,基于密度的空間聚類和噪聲算法的平均準確率達到了 99.3%。在此基礎上,設計并進行了離線實驗,5名被試都能夠發送準確率高于 99% 的命令。
A、硬件本研究中使用的機械臂控制系統包括機器人手臂、眼動追蹤設備和用戶界面。
myCobot 六軸協作機器人本實驗機器人使用的是協作機器人手臂,該系統是一個多功能、輕量級的智能機器人。
由大象機器人開發,具有豐富的硬件和軟件交互和多種兼容性。機器人有效支持多平臺二次開發幫助用戶進行多場景開發。
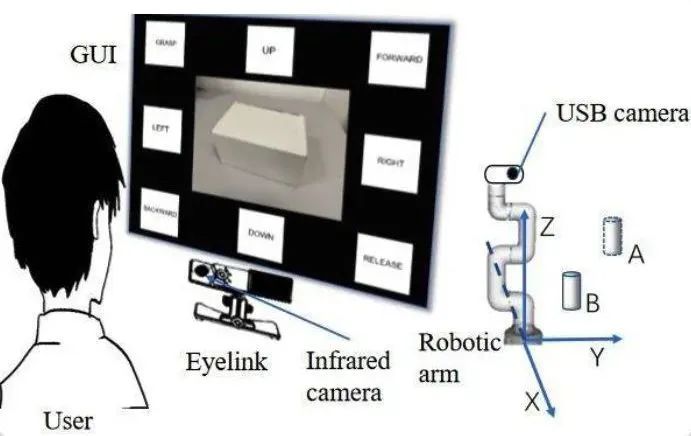
B、用戶界面設計實驗的刺激界面包括八個矩形框和實時攝像機的傳輸屏幕共有九個區域。在九個區域中,位于左上角和右下角標記為抓住/釋放標簽,用于控制機器人手臂展開。其它六個標簽被標記為向上、向前、向左、向右、向后和向下。這六個矩形框表示六個機械臂移動方向:向上、向前、向后,向左、向右、向下。
C、 程序本研究的離線實驗流程設計為:基于初步實驗的結果。被試首先聽到0.5秒的聲刺激。然后,為了確保實驗的隨機性,用戶界面上的八個矩形命令框隨機出現一個紅色方框,以提醒被試,持續2秒。同時,試次間隔也是2秒。一共進行10次,根據離線實驗流程,被試做出選擇,并計算其準確度。

數據處理和分析
A、 眼動信號處理使用MATLAB 2020將EDF格式轉換為可被識別的MAT格式。
B、 焦點分析為了獲得更高的注視精度,進行了預實驗。使用三種方法:閾值法(TTM),高斯歸一化方法(GNM)和基于密度的聚類用于處理被試的注視點數據的算法。
C、 機械臂的智能規劃采用智能規劃算法控制機械臂末端執行器以指定的姿態移動到指定點。
結果:
結論:
本研究開發了一種基于眼動跟蹤控制的機械臂控制系統,以幫助有運動障礙的人進行康復或執行日常任務。
東南大學研究團隊首先使用機械臂路徑智能規劃算法獲得三維空間數據,然后擬合機械臂的工作盲區。并比較了三種估計用戶注視點的算法,并在預實驗中比較了它們的性能。
在離線實驗中,基于DBSCAN算法設計了一個具有八個命令和實時視頻回放的GUI,以控制機器人手臂完成拾取和放置任務。
對圖形用戶界面的創新設計以及DBSACAN算法的評估和使用改善了人眼追蹤中的人機交互困境。
審核編輯:劉清
-
機器人
+關注
關注
210文章
28197瀏覽量
206514 -
GUI
+關注
關注
3文章
648瀏覽量
39548 -
DBSCAN算法
+關注
關注
0文章
3瀏覽量
1243
原文標題:案例分享丨桌面級六軸協作機器人機械臂在教育醫療場景下的應用
文章出處:【微信號:ElephantRobotics,微信公眾號:大象機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
凌科電氣新品發布:揭秘機械臂高可靠連接器解決方案
生成式人工智能在教育中的應用
OrangePi AIpro應用:機械臂應用開發指南

晶沛導電滑環在醫療機械臂的應用
SolidWorks教育版在教學上的重要作用
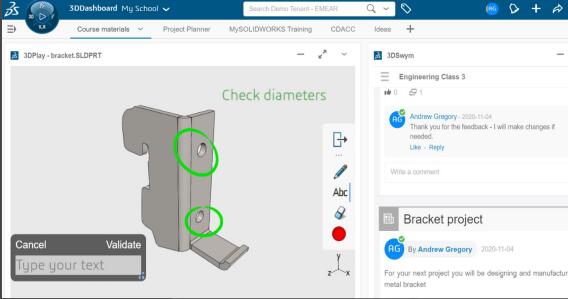
SolidWorks教育版在教學中的具體應用
大象機器人開源協作機械臂機械臂接入GPT4o大模型!

光纖技術在教育中的意義大嗎
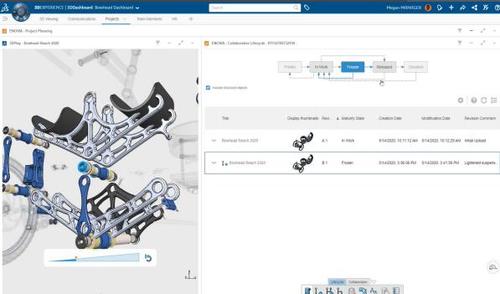
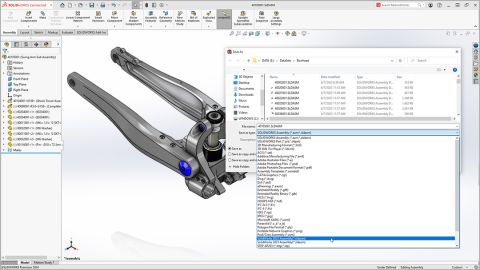
SOLIDWORKS在教育領域的應用
機械臂技術的前沿探索:年度案例回顧!
WiFi模塊在教育領域的創新應用
投影融合系統在教育領域的應用與發展趨勢

數字化IP網絡廣播在教育領域的應用與影響






 工商網監
工商網監
評論