 PI調節器介紹及設計
PI調節器介紹及設計
導讀:由現有文獻指出,矢量控制的控制性能依賴內環的參數整定,所以本期文章重點分析和介紹常用的幾種PI調節器:傳統PI調節器、復矢量PI調節器、離散域下的PI調節器和基于MPC設計的PI調節器。
一、PI調節器介紹
1.1原理當不完全了解一個系統和被控對象, 或不能通過有效的測量手段來獲得系統參數時,最適合用 PID控制技術。1.1.1 比例 (P) 控制
控制器的輸出與輸入誤差信號成比例關系。偏差一旦產生,控制器立即就發生作用即調節控制輸出,使被控量朝著減小偏差的方向變化。
Kp 越大,偏差減小越快。但易引起震蕩,在延遲環節較大時,Kp 越小,引起震蕩可能性越小,調節速度越慢。單純的比例控制存在穩態誤差不能消除。
1.1.2 積分 (I) 控制
控制器的輸出與輸入誤差信號的積分成正比關系。為了消除穩態誤差,在控制器中必須引入“積分項”。積分項對誤差取決于時間的積分,隨著時間的增加,積分項會增大。這樣,即便誤差很小,積分項也會隨著時間的增加而加大,它推動控制器的輸出增大使穩態誤差進一步減小,直到等于零。
但積分 I 有 90 度的相位滯后,這會減小相位裕度,常見的結果是超調和震蕩。
比例 + 積分 (PI) 控制器,可以使系統在進入穩態后無穩態誤差。
性能影響:
積分控制可以增強系統抗高頻干擾能力。故可相應增加開環增益,從而減少穩態誤差。但純積分環節會帶來相角滯后,減少了系統相角裕度。
1.1.3 PI調節器分類
a)位置式PI電流調節器
PI 調節器的輸出直接控制執行機構。這種算法的優點是計算精度比較高,缺點是每次都要對 e(k)進行累加,很容易出現積分飽和的情況,由于位置式 PI 調節器直接控制的是執行機構,積分一旦飽和就會引起執行機構位置的大幅度變化,造成控制對象的不穩定。
b)增量式PI電流調節器
增量式 PI 算法與位置式 PI 算法并沒有本質的區別,只是增量式 PI 算法控制的是執行機構的增量 △u(k),這種算法的優點在于:由于輸出的是增量,因此計算錯誤時的產生的影響較小,控制量的確定僅與最近幾次偏差采樣值有關,運算量相對較小。這種算法的缺點在于:每次計算 △u(k) 再與前次的計算結果 u(k -1) 相加得到本次的控制輸出。
這就使得 △u(k) 的截斷誤差被逐次的累加起來,輸出的誤差加大。當采用增量式算法時必須盡量減小定點運算帶來的截斷誤差,否則,每一次運算的截斷誤差將會逐次累積,使系統的控制精度變差,造成系統的靜態誤差。
二、PI調節器設計
2.1傳統PI電流調節器
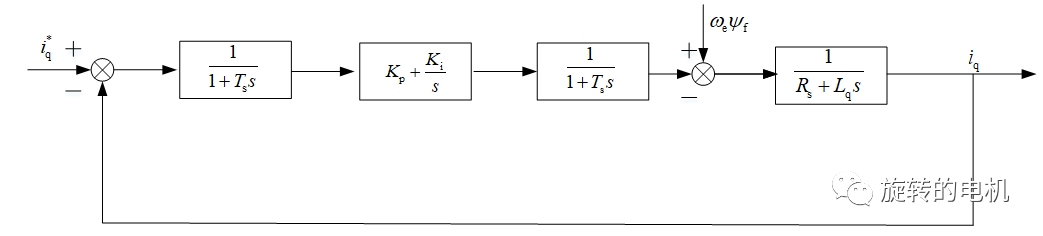
傳統PI電流調節器如公式(1)所示,對d、q軸電流進行分別調節。
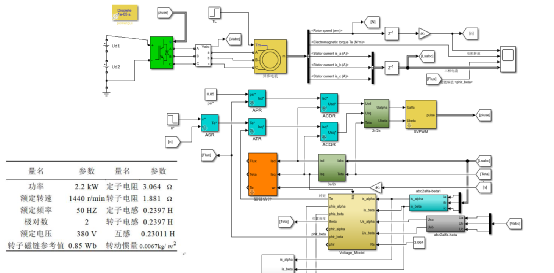
圖1 傳統PI電流調節器
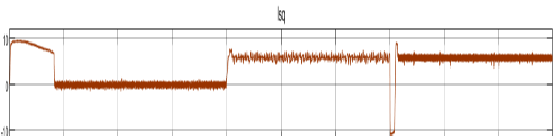
圖2 傳統PI電流調節器q軸電流階躍響應
基于傳統PI電流調節器的FOC中q軸電流階躍響應雖然具有較快的上升速度但超調量很大。
2.2復矢量PI電流調節器
傳統的線性 PI 調節器將電流內環分離成 d、q 軸兩個控制環,由于兩個環路之間存在交叉耦合項并不能實現完全獨立設計。而復矢量調節器將 d、q軸的電流環當作一個整體,與傳統方法相比具有更優的控制性能和參數魯棒性。
將電機數學模型的狀態方程中的反電動勢項略掉后進行拉普拉斯變換,得到定子電流到電壓的傳遞函數如式(2)所示。
根據公式(2),可以設計復矢量調節器如式(3).

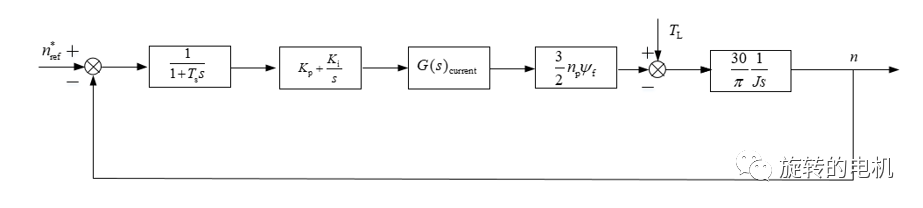
圖(3)是基于復矢量調節器的電流環的控制框圖。
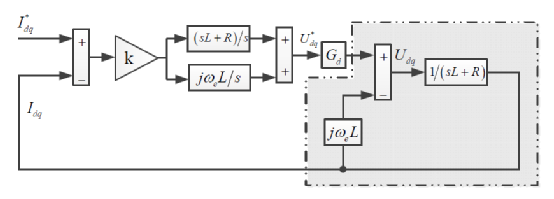
圖3 基于復矢量調節器的控制框圖
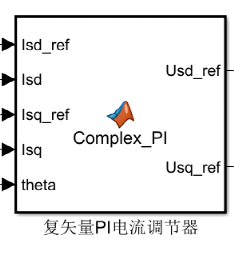
圖4 復矢量PI電流調節器
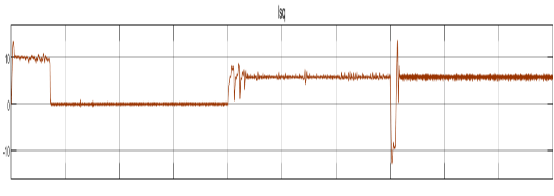
圖5 復矢量PI電流調節器q軸電流階躍響應
基于復矢量PI電流調節器的FOC中q軸電流相比較于基于傳統PI電流調節器的動態效果要好一些,穩態時的諧波也更小一些。三、基于不同PI時的FOC波形對比分析
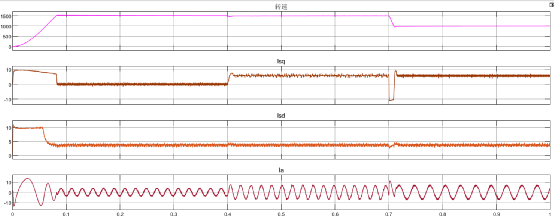
(a)傳統PI電流調節器
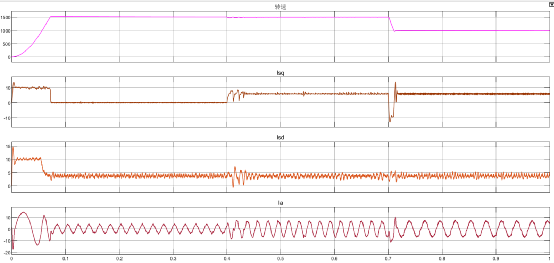
(b)復矢量PI電流調節器
圖6 各工況下的運行仿真情況
從圖6可以看出,在突加、減負載時,q 軸電流能迅速跟蹤指令值,電機轉速略有變化后很快恢復至穩定值,同時 d 軸電流基本維持恒定,驗證了復矢量PI電流調節器的有效性。
四、總結
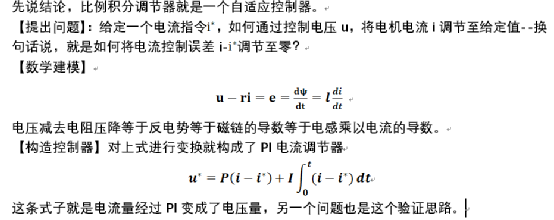
4.1對PI電流調節器的思考
為什么電壓量自經過PID控制器就變成電流量?電流量自經過PID控制器就變為電壓量?
4.2小結
未考慮改變電機參數和其他特殊的運行方式時,兩種調節器在仿真中的性能區別不是很大。但是總體上而言,復矢量PI調節器不像傳統 PI 調節器那樣將兩個電流環分開考慮,所以復矢量PI調節器的結構要簡單很多。
-
控制器
+關注
關注
112文章
16197瀏覽量
177395 -
PI
+關注
關注
12文章
210瀏覽量
112138 -
調節器
+關注
關注
5文章
831瀏覽量
46364
原文標題:兩種PI電流調節器分析比較
文章出處:【微信號:淺談電機控制,微信公眾號:淺談電機控制】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
PI電流調節器的工作原理和種類
FOC電機控制中的PI調節器
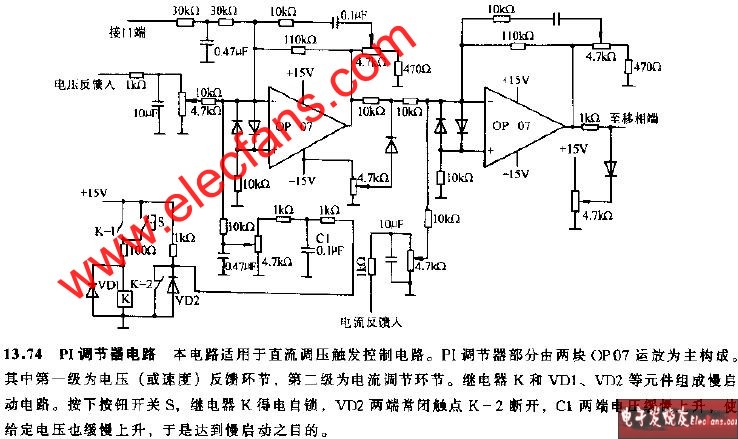
pi調節器原理_pi調節器電路圖_pi調節器參數作用
pi調節器的輸入和輸出_pi調節器的傳遞函數
永磁同步電機磁場定向控制轉速環PI調節器參數整定

永磁同步電機磁場定向控制電流環PI調節器的參數整定
永磁同步電機磁場定向控制轉速環PI調節器的參數整定





 工商網監
工商網監
評論