 基于多邊形拼接虛擬管道的無人機集群分布式控制
基于多邊形拼接虛擬管道的無人機集群分布式控制
本文節選并改編于“Yan Gao, Chenggang Bai and Quan Quan. Distributed Control for aMulti-Agent System to Pass through a Connected Quadrangle Virtual Tube [J]. IEEETransactions on Control of Network Systems (Early Access), 2022
簡介
近些年來,隨著相關技術的快速發展,無人機集群越來越多的應用于各種復雜的任務。其中,如何引導無人機集群穿越復雜環境并安全到達指定區域是一個亟待結局的問題。在這過程中,各無人機不僅要實現機間防碰撞,還需要與環境中的各種障礙物防碰撞。 本文創新性的設計了一種“多邊形拼接虛擬管道”,在虛擬管道內沒有障礙物。因此無人機只需在實現機間防碰撞的基礎上,保持飛行在虛擬管道內,即可實現穿越復雜環境。針對多邊形拼接虛擬管道,本文還設計了一種基于向量場算法的分布式控制器,并通過仿真、實驗進行驗證。
1. 虛擬管道建模
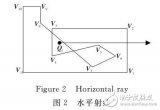
多邊形拼接虛擬管道的基礎是“梯形虛擬管道”,因此首先介紹梯形虛擬管道。如圖1所示,梯形虛擬管道包括一條起始線,一條終點線和兩條邊界線。相對應的,多邊形拼接虛擬管道的每個多邊形,同樣包括一條起始線,一條終點線和兩條邊界線,如圖2所示。不同之處在于,梯形虛擬管道的起始線與終點線必須保持平行,多邊形則不然。
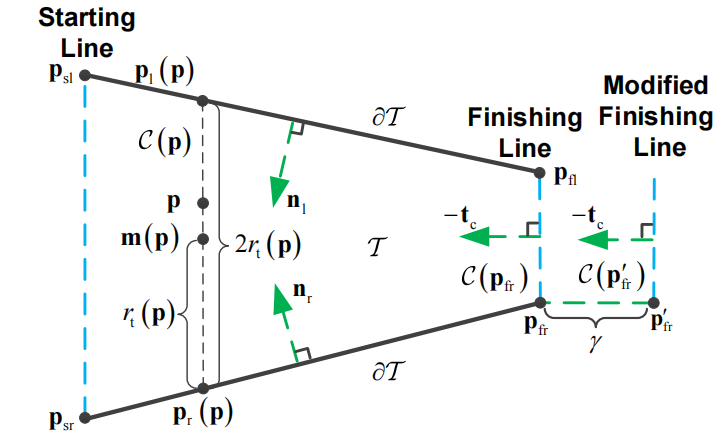
圖1
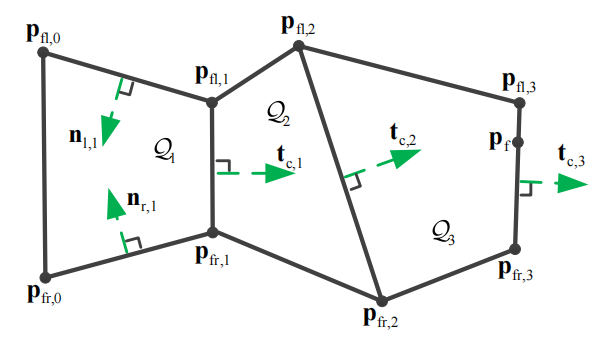
圖1
2. 控制器設計
針對梯形虛擬管道,我們基于向量場算法,設計了一種無死鎖的分布式控制器。該控制器由三個控制指令疊加而成,分別為沿著管道前飛指令,防碰撞指令以及管道保持指令。基于拉塞爾不變集的相關性質,我們證明了該控制器可保證無人機集群始終安全地飛行在虛擬管道內,并能順利通過梯形虛擬管道,且無死鎖、堵塞現象的發生。圖3展示了該控制器的向量場示意圖,其中管道中心處存在一架友方無人機。
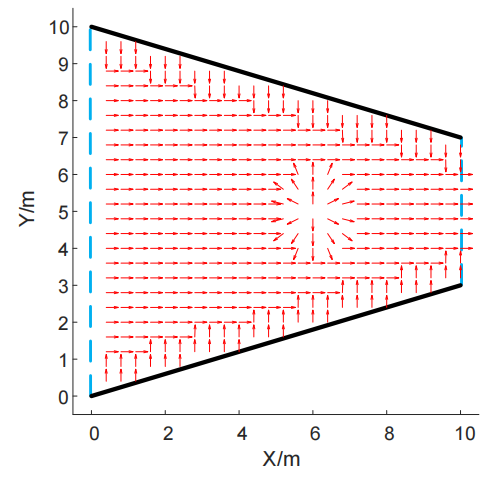
圖3
針對多邊形拼接虛擬管道,我們設計了一種無死鎖的切換邏輯。如圖4所示,每個多邊形都定義了其對應的內接梯形、外接梯形和底邊梯形。當無人機恰好穿越兩個多邊形的分界線時,無人機首先應用下一個多邊形對應的底邊梯形控制器。當無人機進入該多邊形對應的內接梯形時,無人機轉而應用該內接梯形的控制器。
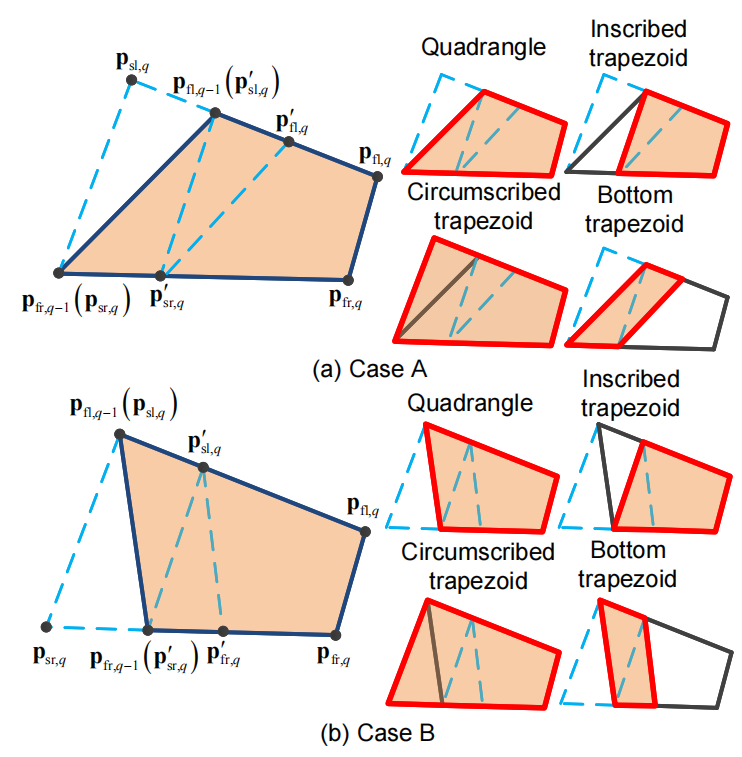
圖4
3. 仿真與實驗
首先,在Matlab仿真環境中驗證所提出算法的有效性。如圖5所示,20架無人機以不同的速度穿越多邊形拼接虛擬管道。在仿真開始時,最前方的無人機速度最慢,最后方的無人機速度最快,因此后方的無人機有超越前方無人機的趨勢。通過仿真可以看出,我們提出的算法實現了控制目標,即無人機集群始終安全地飛行在虛擬管道內,并能順利通過虛擬管道。其次,我們利用Tello無人機遠程控制平臺進行實驗。如圖6所示,與仿真結果類似,各個無人機安全、快速地穿越了多邊形拼接管道。
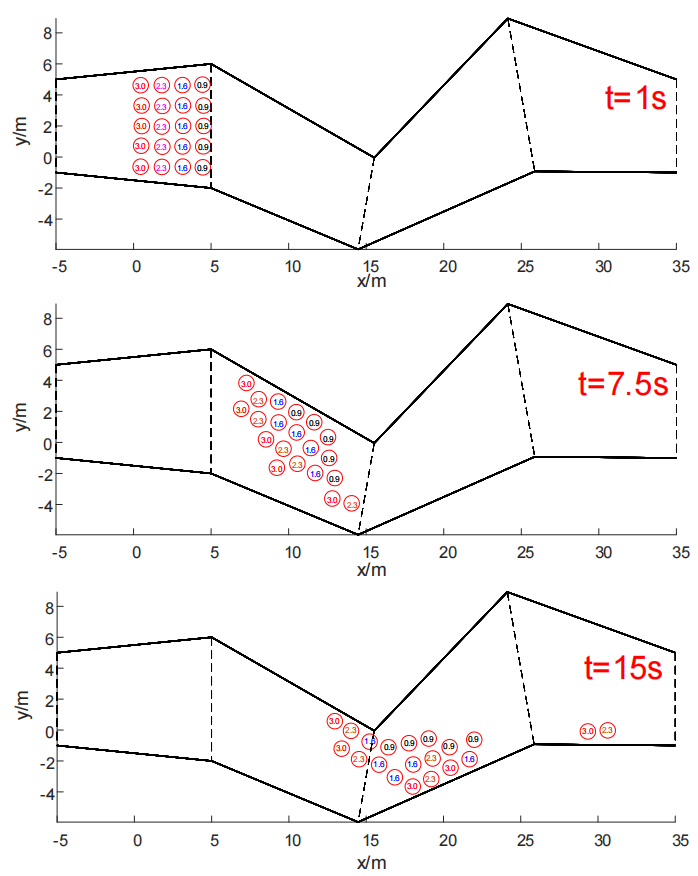
圖5
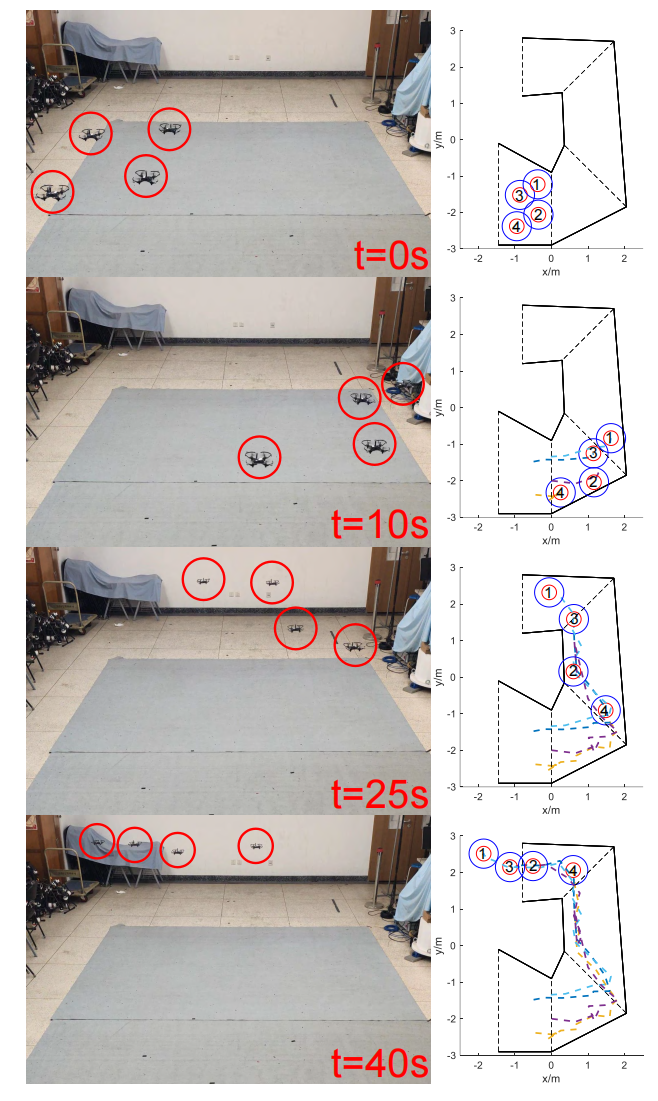
圖6
審核編輯 :李倩
-
控制器
+關注
關注
112文章
16198瀏覽量
177398 -
算法
+關注
關注
23文章
4599瀏覽量
92641 -
無人機
+關注
關注
228文章
10336瀏覽量
179609
原文標題:基于多邊形拼接虛擬管道的無人機集群分布式控制
文章出處:【微信號:雨飛工作室,微信公眾號:雨飛工作室】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
基于虛擬儀器的城市景觀照明分布式控制系統設計與實現
無人機主從式姿態同步控制器設計與仿真
工業機器人分布式控制系統實例

新型的高壓變頻分布式控制系統
CAD圖形里的圓顯示為多邊形怎么辦?
一種新的判斷點在多邊形內外的算法
集群無人機的影響及應用發展
基于CAN總線和分布單元控制器實現高壓變頻分布式控制系統的設計
分布式控制系統的介紹
無人機集群如何自己組網
多無人機系統的一致性分布式控制器





 工商網監
工商網監
評論