 面向SLAM魯棒應用提出了基于RGB特征點提取算法
面向SLAM魯棒應用提出了基于RGB特征點提取算法
摘 要 :視覺 SLAM(Simultaneous Localization And Mapping)的魯棒性是困擾其走向應用的瓶頸,其中特征點提取算法的魯棒性是重要影響因素。針對目前特征點提取算法普遍基于灰度圖像,造成較大信息損失的問題,提出 RGB 圖像的信息熵度量,驗證了 RGB 圖像變換為灰度圖像的信息損失。在此基礎上,提出了基于信息熵評價的特征點提取算法,根據 RGB 圖像三個通道的信息熵確定灰度變換權重,最大限度保留圖像信息 ;然后利用 FAST算法進行特征提取 ;最后直接基于 RGB 三通道構建特征描述子,實現特征在像素級的融合,為特征匹配提供可靠的依據。通過實驗證明,改進的 RGB 特征點提取算法的匹配精度相比經典 ORB 算法在一定程度上有所提高 ;同時,相較于使用 RANSC 算法的 ORB 算法,二者精度基本相同,但較大程度地縮短了處理時間,基本可以滿足實時處理的需求。
0 引 言
視覺SLAM(Simultaneous Localization And Mapping)的關鍵是建立圖像間魯棒的特征點匹配關系,其決定著攝像機運動參數的求解精度和目標點三維世界坐標重建精度[1],而影響匹配效果的重要因素是特征點提取算法。當前相對成熟的視覺SLAM解決方案有 Mono[2]、PTAM[3]、ORBSLAM[4]、SVO[5]、LSD-SLAM[6]和ORBSLAM2[7]等,普遍基于灰度圖像進行特征點提取即匹配,對于環境對比明顯的情況表現相對穩定,尤其ORBSLAM2更是因采用ORB特征在室外環境也有著較好的表現 ;相比于 SIFT、SURF 等多尺度提取算法,ORB特征提取算法簡單,匹配精度相對較高,適合實時應用的場合。但也存在著當環境局部紋理或結構相似時所提取特征點的描述子無法加以區別的問題,從而造成錯誤匹配,而這種錯誤在多數應用場景下是無法接受的。為此,尋求更為魯棒的特征點提取算法對于視覺SLAM就顯得尤為重要。隨著彩色圖像處理技術的不斷發展,基于彩色圖像的特征提取已經應用在很多場合。彩色圖像包含的特征信息要多于灰度圖像,它不僅包含灰度圖所攜帶的特征信息,還包含飽和度及色度分量的特征信息。據統計,基于灰度圖像提取的特征信息僅占原始彩色圖像的百分之九十。本文將充分挖掘彩色圖像所包含的信息,構建基于RGB圖像特征點提取算法,以此提高視覺SLAM的魯棒性。
1 RGB圖像信息熵度量
圖像特征點提取的本質即信息的提取,如果能對灰度圖像和彩色圖像包含信息進行特定度量和比較,將為信息提取算法提供理論上的指導。按照 Marr 計算理論 [8],圖像中的信息即圖像中顏色或亮度的變化,呈現出的是物體和物體的關系以及與人的關系的要素。如果把一幅圖像看作一個虛構零記憶“灰度信源”的輸出時,可以通過觀察圖像的直方圖來估計該信源的符號概率。假設圖像大小為M×N,灰度范圍為 [0,L-1],rk為此區間的離散灰度隨機變量,nk為第k級灰度在圖像中出現的次數。這時,灰度信源的熵變為 :

其中,
目前對于RGB值和灰度的轉換,從心理學的角度來看滿足人眼從彩色到亮度的感覺轉換,對紅、綠、藍三種顏色賦以固定權重,通過加權求和得到灰度值,數學關系如下 :

其中:R、G、B 分別為對應像素的紅、綠、藍分量;Grey為轉換后像素的灰度值。
根據式(1)圖像信息熵的定義,變換后的灰度圖像的信息熵可輕易求得,而原始 RGB 圖像的信息熵成為問題的關鍵。如果將 RGB 圖像看作三個獨立圖層的簡單疊加,則它的信息熵就是三個圖層信息熵的和,即 :

其中:HR、HG、HB 分別為R、G、B三個圖層對應的信息熵,而HRGB為彩色圖像總的信息熵。此種定義在形式上比較簡單,但其割裂了三個圖層的彼此聯系,這與實際情況不符。為最大限度反映彩色圖像的信息規律,將R、G、B 三個圖層看作一個整體,某個像素看作隨機向量rRGB=(R, G, B),R∈[0,L-1],G ∈[0, L-1],B∈[0, L-1],則其信息熵可定義為:

其中,
在此運用上述定義對變換前后的RGB圖像和灰度圖像的信息進行比較,為得到可靠的結果,選用了4幅不同場景的圖像進行變換,其結果如圖1所示。
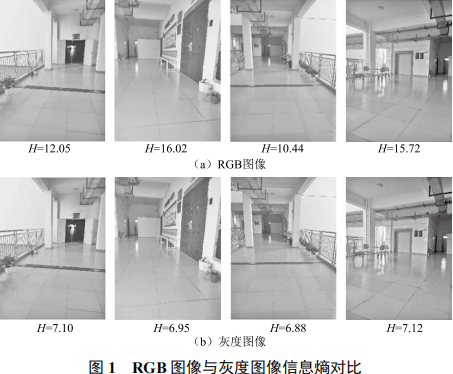
由圖1可以看出,RGB信息熵都遠大于相對應的灰度圖像信息熵。也就是彩色圖像變換為灰度圖像后,圖像的信息量有比較大的損失,對后續的特征提取必將產生影響。
2 基于RGB特征點提取算法
基于RGB圖像的特征點提取算法可分為三類 :一是基于輸出融合,分別對RGB圖像三個通道進行特征提取,根據設計的融合準則得到整體的特征,實現相對簡單,但容易導致信息丟失 ;二是基于RGB顏色向量,將RGB圖像看作二維網格上的三維向量場,通過求解向量值函數實現特征提取 ;三是多維梯度方法,屬于信息級的融合策略,可實現最終RGB特征信息增強[9-10]。
2.1 RGB 特征點查找算法
本文將采用第二類方法,基于信息熵計算RGB每個分量的最優融合權值,實現像素級的融合。算法步驟如下 :
(1)計算RGB圖像三個通道IR、IG、IB的信息熵 :
其中,pR(Rk)、pG(Gk)、pB(Bk) 分別是IR、IG、IB三個通道的直方圖統計量。
(2)根據圖像信息量確定三個通道的權重。為了最大限度地保留圖像信息,按照信息量的大小分配權重 :

(3)基于信息量將RGB圖像線性變換為灰度圖像 :

式中,R、G、B分別是RGB圖像任意像素的分量。
由此證明基于信息熵的線性變換的信息量得到最大保留, 該命題可等效為 :任意假設線性變換Grey=λRR+λGG+λBB,對應的信息量HGrey≤HGreyI。
證明 :假設 Greyk 為變換后灰度圖像的離散灰度隨機變量,Rk、Gk、Bk分別為原始RGB圖像三通道IR、IG、IB的離散隨機變量。根據信息論可知,當信源的方差越大,則信息熵越大。
假設IR、IG、IB的方差分別為D(Rk)、D(Gk)、D(Bk),且D(Rk)>D(Gk)>D(Bk), 則可推出HR>HG>HB, 從而推出λRI>λGI>λBI。
根據方差性質 :D(Greyk)=λR2D(Rk)+λG2D(Gk)+λB2D(Bk),則有λR+λG+λB=1,推出:λR2D(Rk)+λG2D(Gk)+λB2D(Bk) ≤ λ2RID(Rk)+λ2GID(Gk)+λ2BI D(Bk),從而有:HGrey ≤ HGreyI。
(4)運用FAST算法確定特征點,此處不再贅述。
2.2 RGB 特征點描述子
本文采用的特征點描述子是在 Brief 描述子基礎上加以改進的。為充分利用 RGB 三個通道的信息,描述子建立如下 :
(1)將RGB圖像看作M×N×3的數組,IR、IG、IB 由上至下分布,以IG某二維特征點 (x,y)為中心,取S×S×3的立體鄰域。
(2)在鄰域內隨機選取一對點。隨機規則設計如下 :在圖層選擇上采取均勻隨機采樣 ;圖層上像素采用高斯兩步隨機采樣,即首先對xi 按照高斯分布 采樣,然后對yi 按照高斯分布
采樣,然后對yi 按照高斯分布 采樣。
采樣。
(3)比較二者像素的大小,并按照如下公式進行二進制賦值。

其中,p(xi, yi)和p(xi', yi')是隨機點(xi, yi)和(xi', yi')處的像素值。
(4)重復步驟 1 ~3,生成一個二進制編碼,此編碼即為特征點描述子。
3 實驗及分析
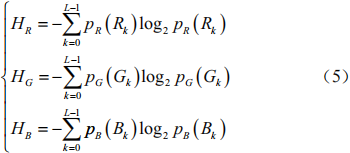
為驗證本文提出的特征點提取算法,擬與原始ORB特征點檢測算法進行比較。分別采集兩組圖片 :第一組是在相同場景下通過平移、旋轉、尺度等變換得到的 ;第二組為完全不同的場景圖片。分別對兩組圖片進行特征點提取,并進行特征點匹配,采用改進的 ORB特征點提取算法(為使ORB 算法具有尺度、旋轉不變性,在此將原算法中的Brie描述子更換為 Surf 描述子)的結果如圖2、圖3所示。
由圖中可看出,相同場景下大部分點的匹配是正確的,由于未采用RANSC算法,有少數點發生了匹配錯誤。如果采用RANSC算法,誤匹配點對可以避免,但匹配時間會大大增加,平均為218.902 ms。對完全不同的場景進行特征提取,即使使用了RANSC算法仍然存在明顯的3處誤匹配,這種錯誤對于人類視覺而言是荒唐的。特征描述子采用的是局部鄰域編碼,從原理上只是經過編碼的特征點的匹配,不代表客觀物體間關系的匹配。產生這一現象一方面是由于特征定義的問題,另一方面是由于算法普遍是基于灰度圖像,未能充分利用原始RGB圖像信息的問題。
對以上兩組圖片采用本文提出的基于RGB特征點提取算法進行處理,同時采用基于距離的匹配算法進行匹配,其結果如圖4、圖5所示。
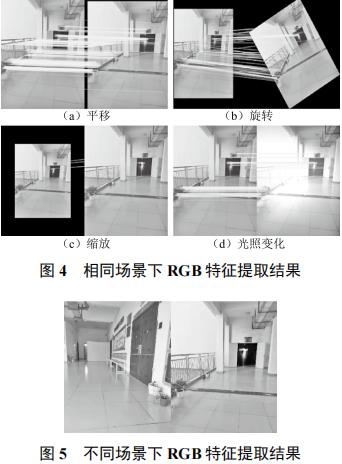
相較于原算法,相同場景下基于RGB特征點的提取算法降低了錯誤匹配,其與原算法組合使用RANSC算法的性能相近,但處理時間縮短了62.014 ms。也說明了在算法充分利用RGB信息后,對于匹配結果的提升是有效的。但在不同場景下基于RGB特征提取仍然存在著極少的明顯誤匹配,這是因為算法本身仍是基于圖像局部范圍,當不同場景存在著較大的相似度時,這種錯誤發生的概率就會增加,通過擴大描述子隨機范圍可以降低錯誤率,但不可能完全避免。
4 結 語
本文面向SLAM魯棒應用提出了基于RGB特征點提取算法,通過與目前普遍使用的ORB特征提取算法進行比較,發現誤匹配率有明顯降低,性能與使用RANSC算法相當,但處理時間得到了明顯降低,從而也驗證了本文提出的RGB圖像信息熵度量方法的正確性,從信息論的角度解釋了算法的有效性。今后,將圍繞不同場景下誤匹配發生的機理展開理論研究,進一步提升特征提取的魯棒性。
審核編輯 :李倩
-
圖像
+關注
關注
2文章
1083瀏覽量
40418 -
RGB
+關注
關注
4文章
798瀏覽量
58388 -
SLAM
+關注
關注
23文章
419瀏覽量
31786
原文標題:論文速覽 | 面向視覺SLAM的改進RGB特征點檢測算法
文章出處:【微信號:iotmag,微信公眾號:iotmag】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
激光雷達在SLAM算法中的應用綜述

MG-SLAM:融合結構化線特征優化高斯SLAM算法

魯棒性原理在控制系統中的應用
深度學習模型的魯棒性優化
魯棒性分析方法及其應用
如何提高系統的魯棒性
從算法角度看 SLAM(第 2 部分)

基于多攝像頭的高魯棒性視覺SLAM系統設計
如何提取、匹配圖像特征點
常用的RGB-D SLAM解決方案

基于NeRF/Gaussian的全新SLAM算法

一種基于RGB-D圖像序列的協同隱式神經同步定位與建圖(SLAM)系統

基于RGM的魯棒且通用的特征匹配






 工商網監
工商網監
評論