 動態無功補償裝置控制系統設計
動態無功補償裝置控制系統設計
摘 要:
從控制系統分層結構、通信協議、各層控制策略及控制算法角度出發,設計出了一種新型動態無功補償裝置控制系統,并利用仿真分析證明了該設計方法是有效的。
0 引言
在西電東送的背景下,廣東地區作為受電端,容易出現多直流饋入及交直流電混聯運行的狀況。因為區域內負荷特性明顯,電源比例較低,無功電源嚴重不足,電壓支撐能力較弱,所以局部地區無功功率不足的問題特別突出。另外,電網運行方式、負荷率、輸電出線、設備損耗等都會影響電網無功功率平衡水平,繼而引起電壓波動。而作為經濟較發達地區,特別是廣州、深圳的電網存在較多高供電可靠性、高電能質量需求的用戶,那么在減少用戶停電時間,提高用戶端電壓合格率的同時,還必須有效地應對日益突出的諧波、閃變、驟降等動態電壓質量問題。為解決上述問題,需設計一種能快速、動態地提供無功的無功補償裝置,以支撐電網電壓,使電網恢復正常運行。
動態無功補償裝置SVG是一種能夠快速實時跟蹤負荷無功功率變化的無功補償裝置,它的特點在于:(1)能夠自動跟蹤控制目標,改善電力系統功率因數,減小功率損耗;(2)能夠快速調整電網無功,以防止過電壓和欠電壓;(3)能夠補償快速變化的電壓波動,減少電壓閃變;(4)能夠抑制低頻振蕩及次同步振蕩,提升電力系統穩定性;(5)能夠利用調諧濾波、有源濾波抑制諧波;(6)當系統負荷不平衡時,可以通過無功補償,使三相有功功率與無功功率達到動態平衡。
基于上述電網存在的問題及動態無功功率補償特性,本文研發了一種新型動態無功補償裝置控制系統,在受端電網中實施動態無功補償,按“小容量多布點”配置,能減少無功異地輸送,降低線損,保證電壓穩定,提高電網可靠性。
1動態無功補償裝置控制系統設計
新型動態無功補償裝置控制系統采用三層分層架構[1],分別為站級控制層、裝置控制層、閥控制層,如圖1所示。站級控制層依據電網調度指令,實現對裝置的啟動/停止、控制模式的選擇、系統參數調節等,還可根據系統狀態和測試需求,選擇多種控制模式。裝置控制層可監測功率元件及輔助設備工作狀態,針對站級控制層下發的指令,產生電流參考值。裝置控制層可采用分相瞬時電流跟蹤控制策略、有源濾波、正負序分離控制策略等。閥控制層采用移相載波PWM調制和死區時間補償控制策略。該控制系統層級清晰,保證了動態無功補償裝置在復雜工況下能安全穩定工作。
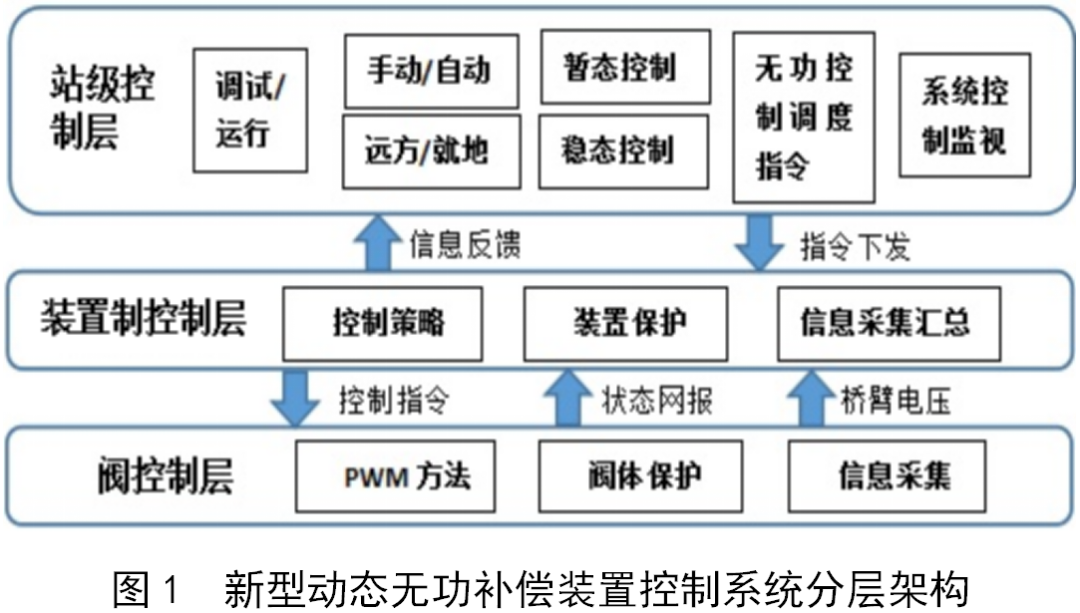
站級控制層、裝置控制層、閥控制層采用國際標準IEC 61850,該標準為變電站數字化監控系統現行標準,具有面向電力系統對象統一建模、通信服務接口、實時服務、配置語言等特點。在站級控制層和裝置控制層間通信網絡采用MMS報文規范及TCP/IP以太網或光纖網,裝置控制層和閥控制層間通信網絡采用GOOSE模型報文規范及以太網。智能電子設備通過網絡進行信息交換,具有與變電站自動化系統之間的互操作性和協議轉換性,方便系統的集成,降低自動化系統運行、監視、診斷和維護等工程費用。
2動態無功補償裝置控制系統的原理
控制系統通過測量電壓、電流等電氣量,并進行相應運算,判斷動態無功補償控制系統工作狀態,選擇動態無功補償控制模式,由站級控制層、裝置控制層和閥控制層按照各自職能控制功率元件,或者通過人機界面選取控制模式、設定控制系統的參數,然后進行相應的控制。
2.1站級控制層控制策略
站級控制層主要功能有:(1)對內啟動或關停動態無功補償裝置控制系統,選擇調試或運行、手動或自動、遠方或就地、暫態或穩態等控制模式,并對動態無功補償裝置進行監視;(2)對外接收上級系統無功控制調度指令,并對上級調度系統或監控中心發送動態無功補償裝置運行及告警信號。站級控制層控制模式有穩態控制模式、遠方控制模式、暫態控制模式等。
2.1.1穩態控制模式
穩態控制模式[2]涵蓋調試模式和運行模式,調試模式有恒無功/恒電流控制,用于SVG調試;運行模式有系統無功、恒電壓和阻尼控制等。每種控制模式以不同控制量為目標,執行各自的控制策略。其中恒電壓控制可與電容器組和電抗器組協調工作,阻尼控制能提供一定阻尼裕度,參與電力系統的穩定控制。
2.1.2遠方控制模式
站級控制層在遠方控制模式下接收調度中心或變電站AVC主控單元的無功指令,該指令直接作為動態無功補償裝置的無功參考值。
2.1.3暫態控制模式
站級控制層在選擇啟用暫態控制模式時,控制系統采集模塊采集相應電氣量,處理模塊采用快速檢測算法對系統電壓進行分析,判斷系統是否存在暫態擾動,并確定是否轉入暫態控制模式,發出相應指令。
2.2裝置控制層控制策略
裝置控制層根據站級控制層下達控制指令,轉入控制模式。它解決了控制系統傳遞函數的實現問題,決定了SVG的穩定性、穩態特性和動態特性;同時裝置控制層是動態無功補償裝置的保護及監視設備,是整個控制系統的核心部分。為解決SVG的輸出電壓未及時調整而出現過流和各橋功率元件的參數不盡相同而引起三相電流不對稱的問題,提出了分相瞬時電流跟蹤控制策略;為消除SVG噪聲的影響,采用有源濾波策略;為應對電力系統故障時不對稱故障,在采用分相瞬時電流跟蹤控制外,提出了不平衡運行時的正負序分離控制策略。
2.2.1分相瞬時電流跟蹤控制策略
分相瞬時電流跟蹤控制具有響應速度快、適應性強、能快速跟蹤負荷電流變化的特點,能提高SVG承受沖擊的能力,降低對電壓突變的敏感性,提高SVG可靠性。分相瞬時電流跟蹤控制核心算法是求解無功補償分量的旋轉變換和補償電流參考值的反旋轉變換,當相位突變不大時,對生成的參考信號影響很小,能夠實時反映負荷電流的真實變化。
設u0為逆變器輸出電壓,uk為逆變器接入點電壓,L、R為逆變器單相連接電抗和等效電阻,采用單相模型:

分相瞬時電流跟蹤控制原理圖如圖2所示。
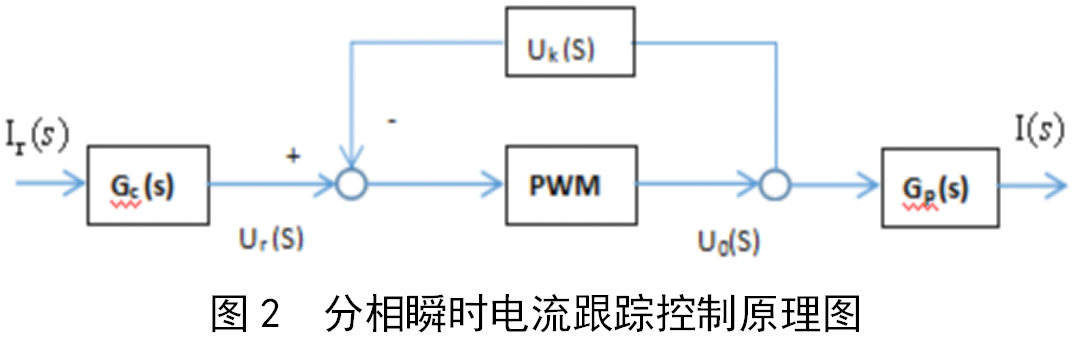
其中:
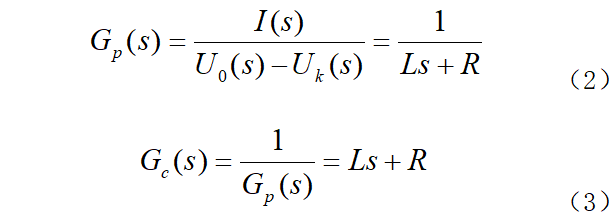
忽略諧波影響,輸出電流I(s)為:

即分相瞬時電流跟蹤控制電流控制的目標是使輸出電流I(s)緊跟參考電流Ir(s)。
2.2.2 有源濾波策略
由于傳遞函數是比例微分環節,容易受到噪聲的影響,可采用有源濾波去除噪聲。SVG控制系統通過諧波和無功電流檢測電路,運算檢測出補償對象電流中的諧波電流分量,計算出補償電流。SVG產生補償電流,與諧波電流抵消,最終得到期望的電流值。
2.2.3 不平衡運行時的正負序分離控制策略
在不對稱方式下,為了有效控制輸出電流,避免裝置發生過流故障,設計了正負序分離的控制策略。當系統電壓不平衡時,幅值和相位都有可能發生變化,無法直接從測量的系統電壓獲得同步角,控制系統構造一個頻率為50 Hz、起始角為0°的虛擬同步角,并把它作為電壓、電流dq變換的旋轉角,分離出正負序分量,然后由SVG輸出部分負序電流以維持平衡。
一般不平衡電壓表示如下:

式中:相電壓ua、ub、uc是電力線對中性點的電壓;ua1、ub1、uc1和、、ua2、ub2、uc2分別為系統電壓的正、負序分量。
SVG為了在故障期和恢復期平穩運行,在故障發生后滿發無功功率,同時還通過正負序分離控制策略輸出部分負序電流,以維持裝置自身的平衡。
2.3 閥控制層控制策略
閥控制層根據裝置控制層下達參考指令,用特定的PWM方法,計算死區時間、最小開通時間和最小關斷時間,產生控制脈沖,以調節功率元件開關,實現SVG輸出,這里采用二電平SPWM調制模式和死區時間補償控制策略。
3 仿真分析
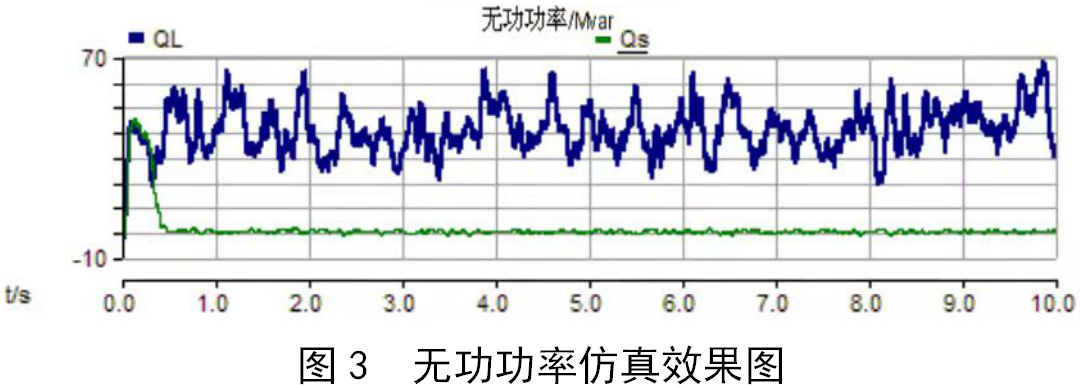
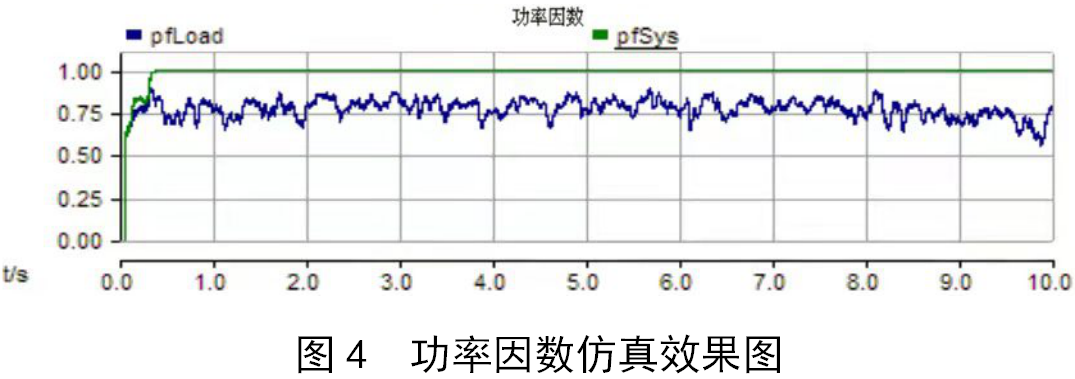
為了證明該新型動態無功補償裝置控制系統設計的有效性,選擇系統無功控制方式進行仿真,仿真對象為某220 kV變電站,控制目標值為220 kV側功率因數1.0,仿真結果如圖3、圖4所示。當負荷變化較大時,系統無功功率波動也較大,新型SVG能實時快速地提供無功,使系統變電站無功接近于0,功率因數穩定地提升到1.0。
4 結語
本文從控制系統分層結構、通信規約、控制策略及控制算法角度出發,設計了一種新型動態無功補償裝置控制系統,并提出了分相瞬時電流跟蹤控制策略和不平衡運行時的正負序分離控制策略解決三相系統不對稱問題,仿真結果證明,該新型動態無功補償控制器設計方法是有效的。
END
審核編輯 :李倩
-
控制系統
+關注
關注
41文章
6546瀏覽量
110484 -
補償裝置
+關注
關注
3文章
20瀏覽量
7557
原文標題:一種新型動態無功補償裝置控制系統研究
文章出處:【微信號:機電信息雜志,微信公眾號:機電信息雜志】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
低壓交流系統無功補償通常采用哪種補償裝置

港口無功補償裝置配置應用







 工商網監
工商網監
評論