 微步進真的那么好嗎?
微步進真的那么好嗎?
微步進真的那么好嗎?
步進電機常被用于定位,它們性價比高、易于驅動,可用于開環系統,且無需像伺服電機那樣提供位置反饋,因此非常適用于小型工業機器,例如激光雕刻機、3D 打印機和激光打印機等辦公設備。
同時,步進電機的品種也非常繁多。對于工業應用來說,每轉 200 步的兩相混合式步進電機最為常見。這里的 “混合” 是指它利用永磁體和帶齒鐵轉子的工作方式(例如可變磁阻電機),而 “200 步” 則指電機每步移動 1.8°,該步數為轉子和定子上齒數的函數。
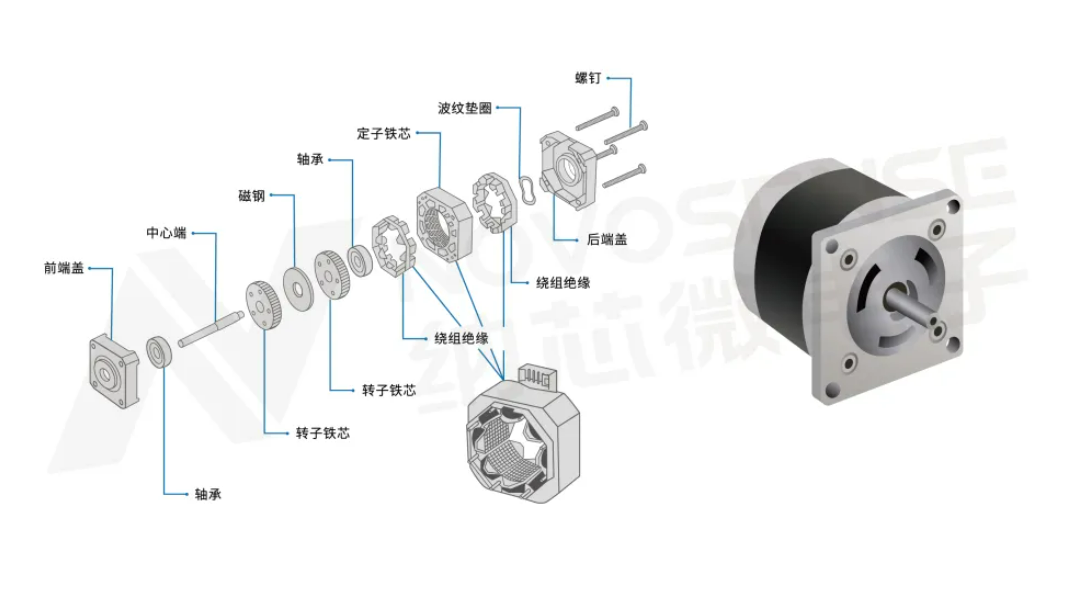
本文將聚焦這種最為常見的兩相混合式步進電機進行闡述。圖 1 即為典型的兩相混合式電機。
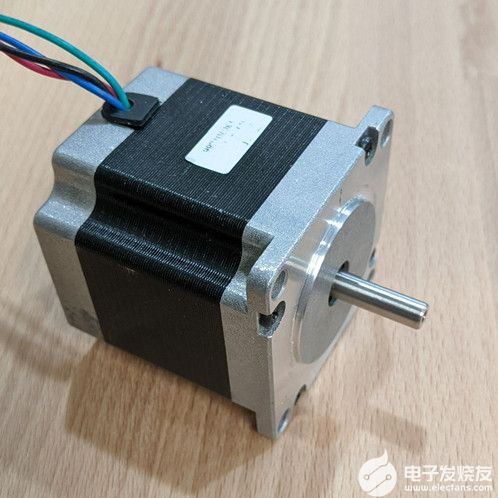
圖 1:典型的兩相混合式步進電機
微步進
步進電機的步進值可以設置為小于整步,稱為微步進。它通過調節繞組電流來實現,使轉子可以定位于整步之間。設計人員幾乎可以定義任何大小的微步進,因為其步進值僅受制于驅動繞組電流的數模轉換器 (DAC) 和放大器的分辨率,所以1/256 分辨率,甚至 1/1024 分辨率都很常見。
然而,實際上對大多數的機械系統來說,這種精細的微步進并不總能提高定位精度,還有很多其他因素都會對性能產生負面影響。
固有誤差
微步進中的角度誤差有幾個來源。一是電機本身的缺陷,如機械和磁性方面的缺陷。沒有電機會擁有完美的正弦電流-位置傳遞函數。即使能夠向電機施加完美的正弦和余弦電流,電機的運動也不可能是絕對的線性。
另一個誤差源是步進電機控制器的電流調節精度。典型的步進電機IC 只能精確到滿量程電流的 5%左右。另外,兩個通道之間的電流調節匹配度也可能并不完美。這些不精確的因素都會降低定位的精度。
有關這些誤差的更多信息,請參閱應用說明 《Understanding MP6500 Current Control》.
步進電機扭矩
步進電機均具有額定的保持扭矩。保持扭矩是將電機從整步位置拉開所需的扭矩,也是電機移動一整步時能夠產生的扭矩。在每一個整步之后,齒都會與最小磁路對齊,從而產生強大的扭矩。
增量保持扭矩=(整步保持扭矩)×sin(90°/X)
上式中的X代表微步進的步數。
舉例來說,對 1/8 步而言,增量扭矩約為整步扭矩的 20%;對1/32 步而言,增量扭矩僅為整步扭矩的 5%。
對運動控制系統而言,它代表在執行微步進時實際要達到的預期位置,電機上的扭矩負載必須遠小于電機額定保持扭矩。
實驗室測量
我們通過幾個實驗來測試微步進的定位精度。實驗室裝置使用了安裝在步進電機軸上的第一表面鏡和一個激光器。首先,光束通過鏡面反射到實驗室的另一端,距離約為9米;然后我們測量激光束的仰角,并計算角度。精度測量主要受限于光束高度的測量精度;±1mm的高度對應±0.006°的精度。
用于實驗的電機為典型的混合式電機,常用于 3D 打印機等產品。該電機為1.8°雙極性電機,額定電流2.8A,保持扭矩為1.26Nm。
第一個實驗單獨測量了電機的精度。我們用精確的直流電流源來驅動兩相,電機軸上無扭矩負載,只有一面鏡子安裝在軸上(參見圖 2)。
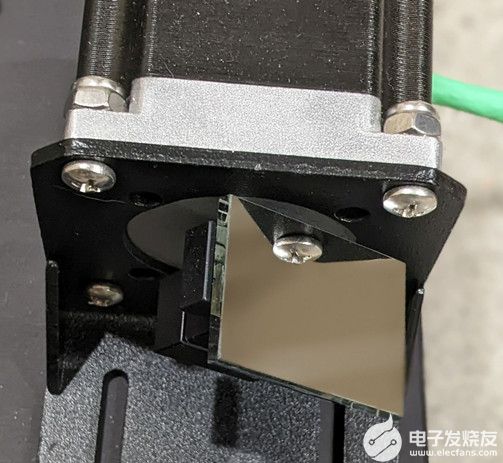
圖2:步進電機軸上安裝的鏡子
采用這種裝置測量的結果顯示出了很小的非線性度;但總體而言,角度精度良好,約為 ±0.03°。而且,電機運動具有單調性(參見圖 3);也就是說,電機永遠不會朝錯誤的方向移動或無法移動。如果出現這類錯誤,那只能說明電機本身具有固有誤差,或者測量錯誤。在這里,1/32 步對應精度為0.056°。
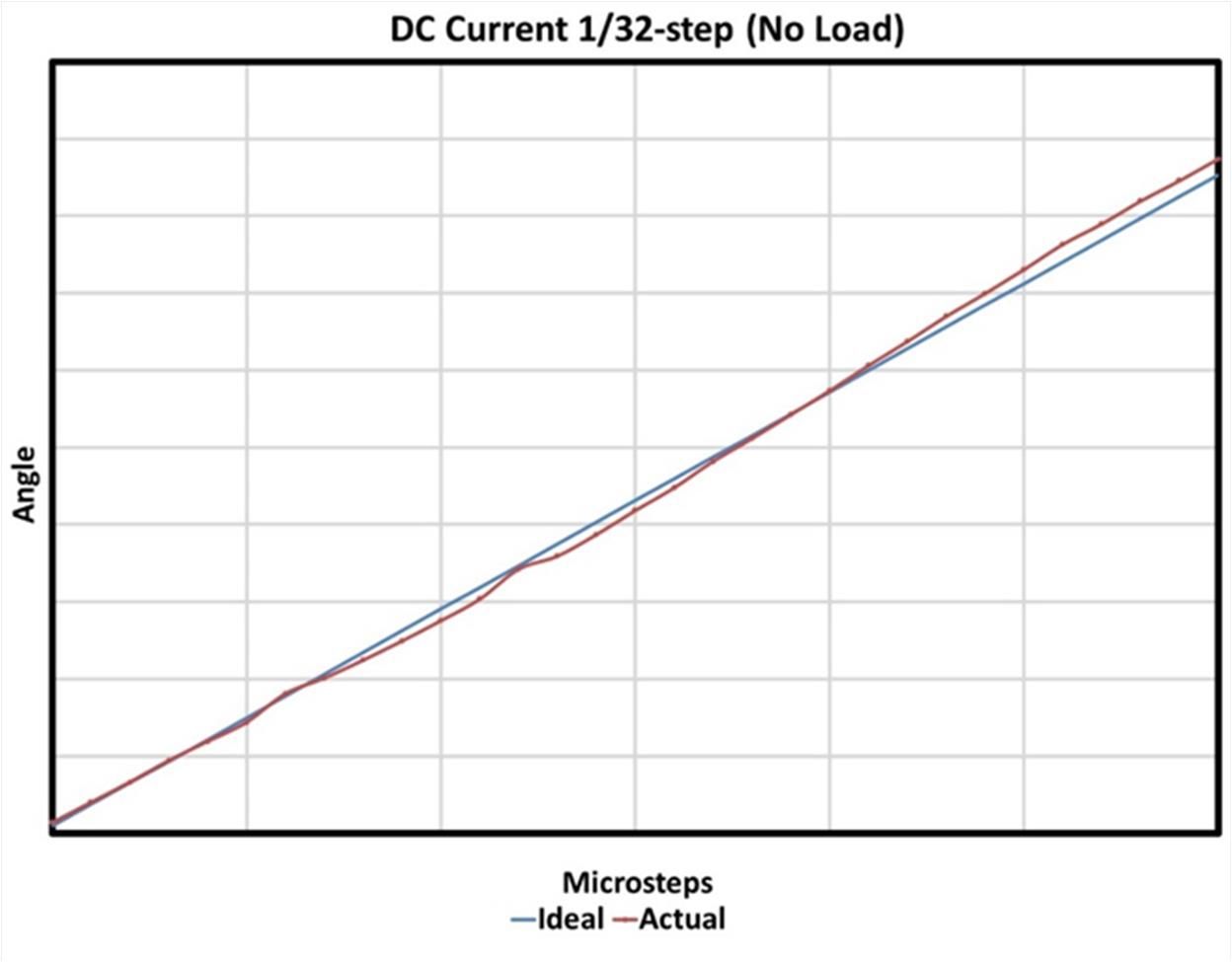
圖3: 1/32步進電機空載精度
接下來,將電機與磁粉制動器連接在一起,該制動器用于向電機施加摩擦扭矩負載(參見圖4)。
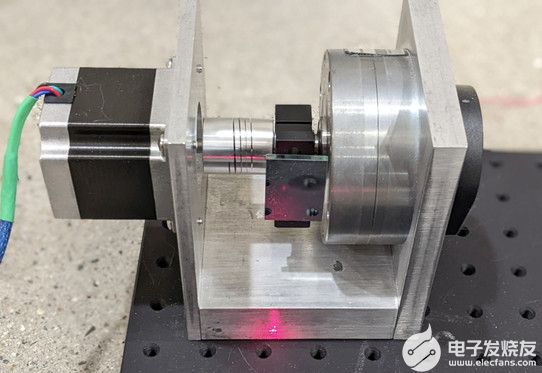
圖4: 制動器裝置
同樣采用直流電流源重復上述測量,將大約 0.1Nm 的扭矩施加到電機軸上。圖 5顯示出,電機每隔一步都會暫停,這與之前的測量結果大為不同。
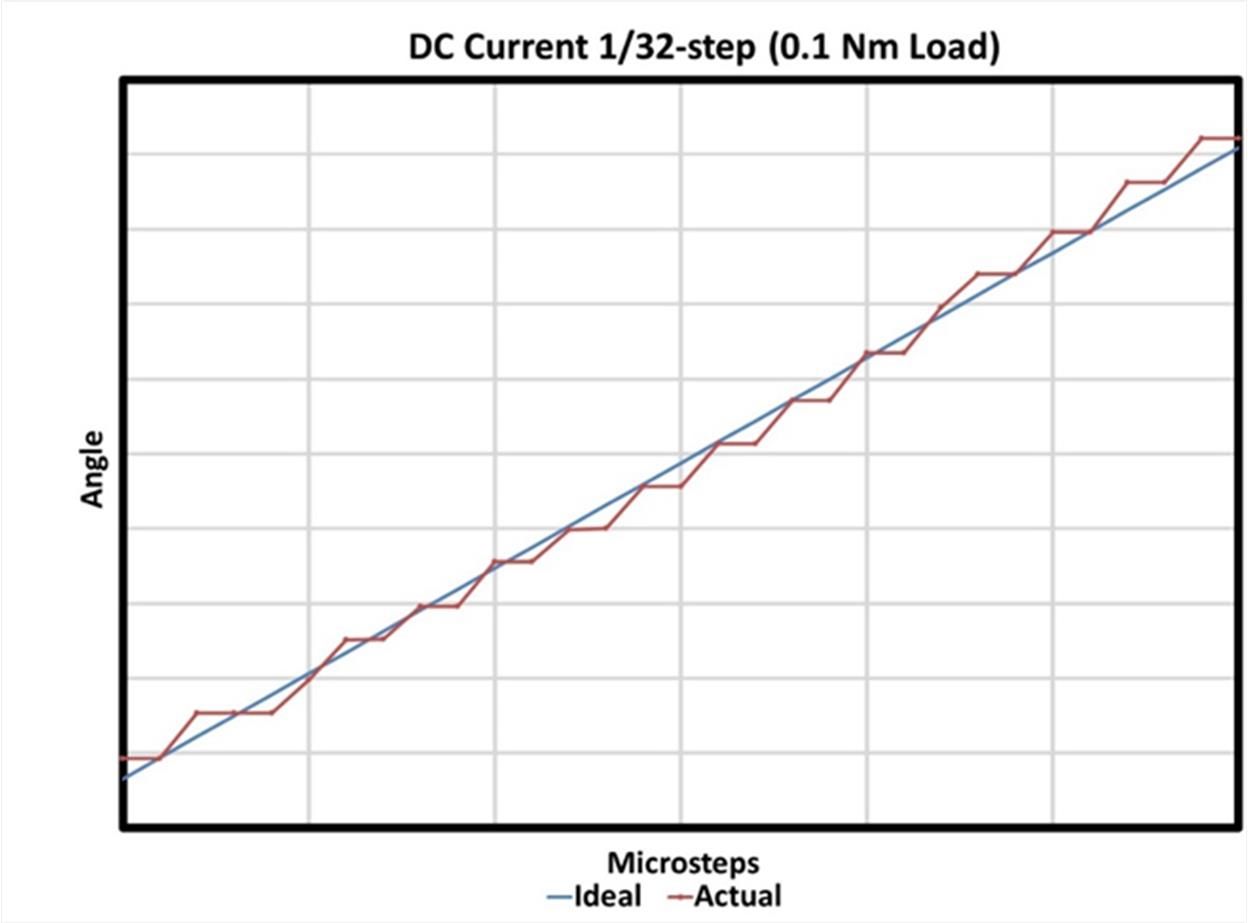
圖5: 增加扭矩后的1/32 步進電機精度
這種行為與電機的計算增量扭矩一致。1/32 微步進的增量扭矩約為保持扭矩的 5%。在保持扭矩為 1.26Nm 的情況下,一個微步進步數產生的預期扭矩約為 0.06Nm。當然,這不足以克服摩擦負載,因此,需要兩個微步進步數才能使扭矩足夠高,以克服負載。
如果將扭矩增加到 0.9Nm(大約是失速扭矩的 70%),則需要更多的微步進步數才能將扭矩提高到使電機運動的點(參見圖 6)。
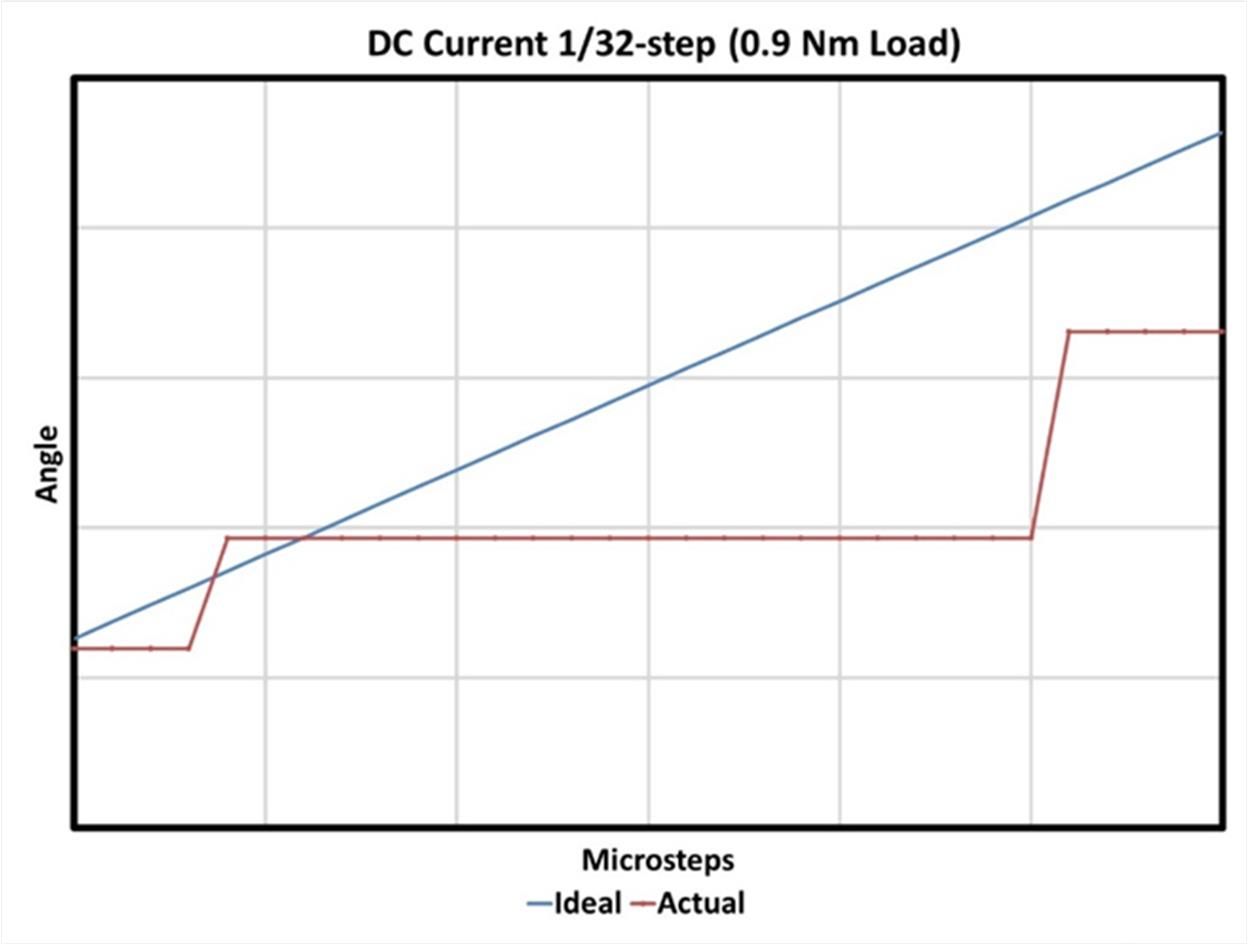
圖6: 扭矩為0.9Nm 的1/32 步進電機
我們采用 MPS 的 MP6500, 步進電機驅動器 IC 進行兩個類似的實驗。MP6500 采用精確的 PWM 電流調節,能以整步、半步、1/4 步或1/8 步運行。圖 7 顯示了 MP6500 的功能框圖。
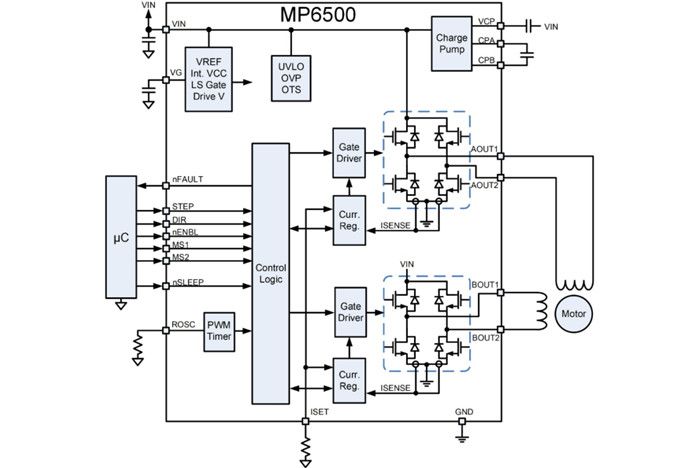
圖7: MP6500步進電機驅動器
為了測試使用傳統步進電機驅動器 IC與使用直流電流源的精度是否不同,首先在 0.1Nm 扭矩和 1/8 步進模式下進行測試。1/8 步產生的扭矩約為整步的 20%,即 0.25Nm,大于施加的 0.1Nm 扭矩。圖 8 顯示的測量結果表明實際角度與理想角度相符。
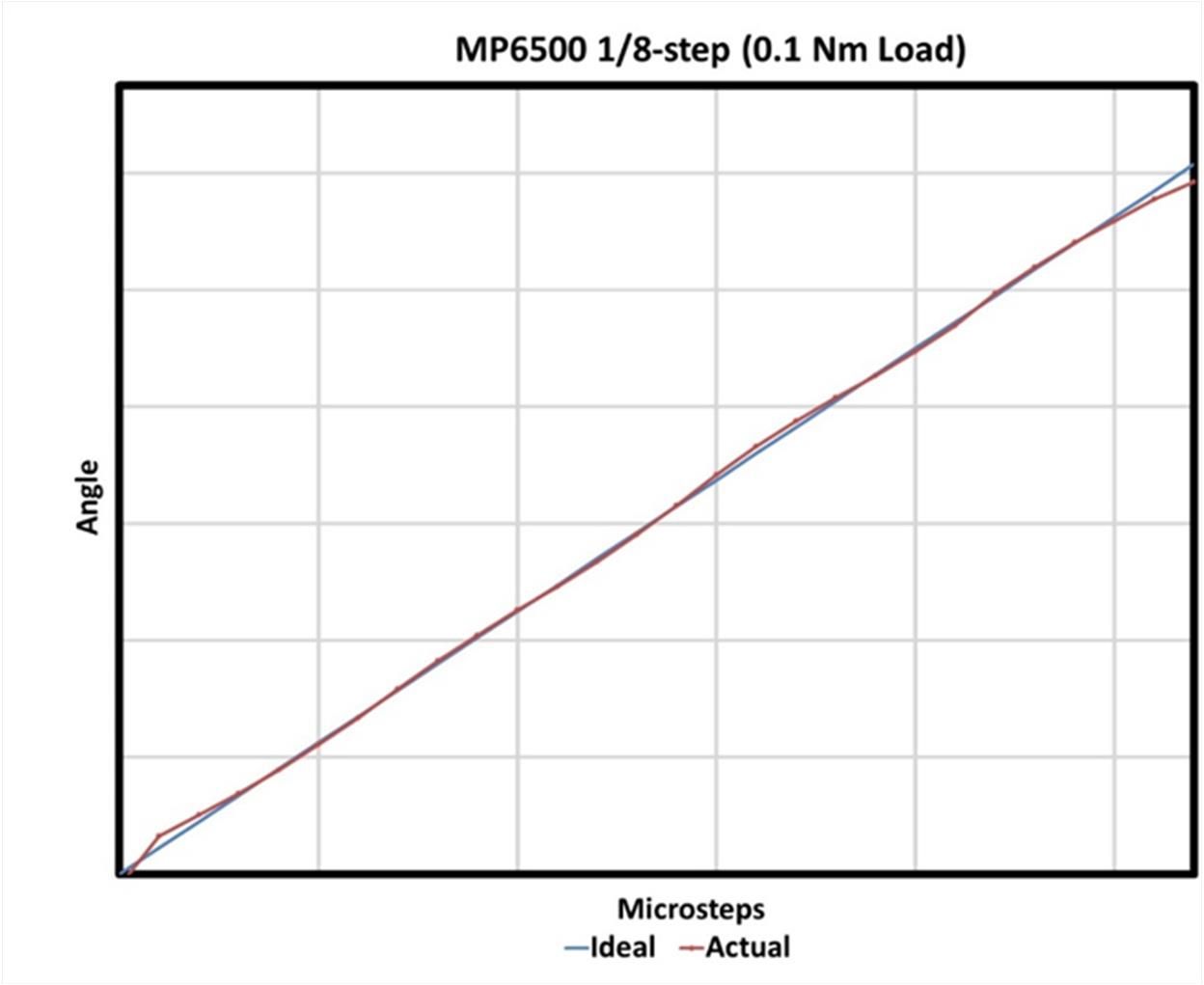
圖8: 采用1/8步且扭矩為0.1Nm 的MP6500
第二次測試施加 0.4Nm 的扭矩。這超過了 1/8 步的增量保持扭矩(0.25Nm)。正如預期的那樣,微步進被跳過(參見圖 9)。
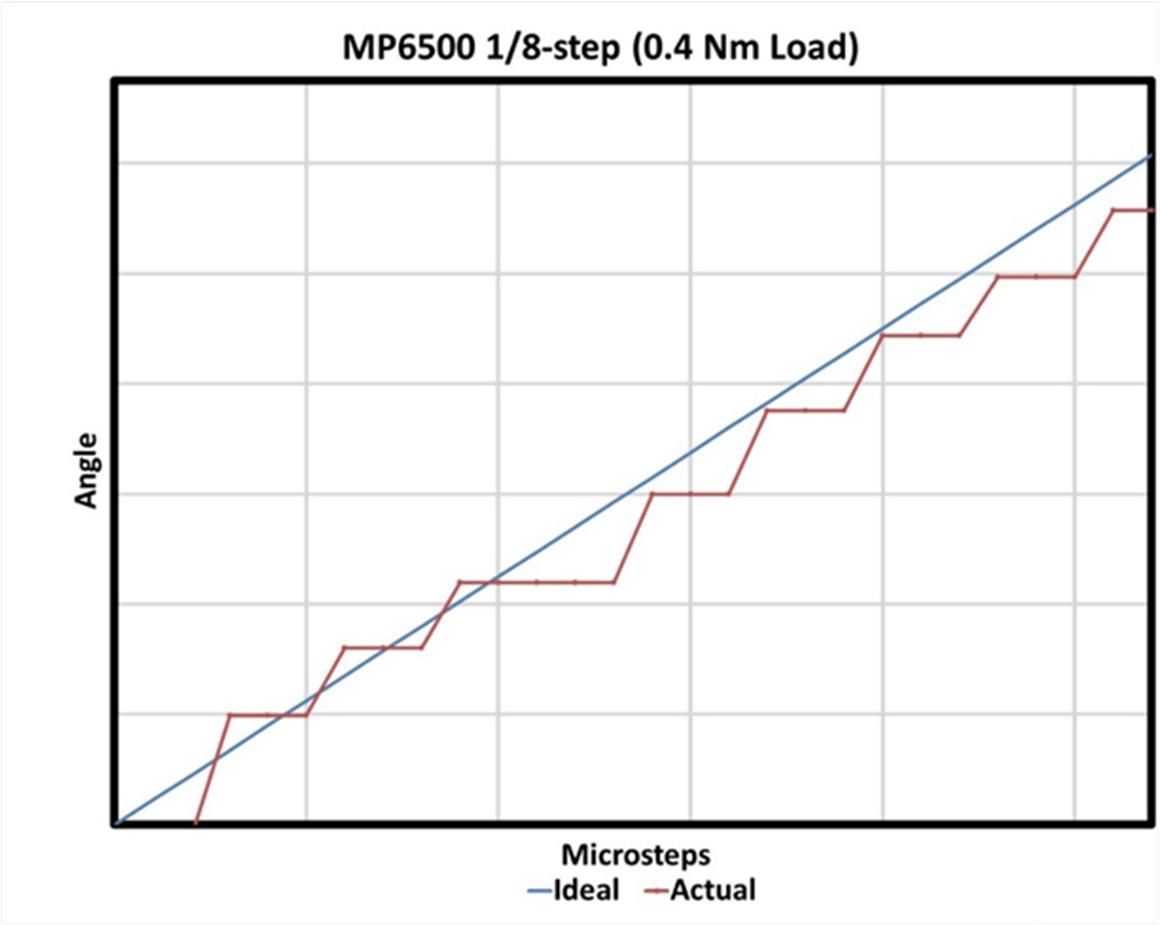
圖9: 采用1/8步且扭矩為0.4Nm 的MP6500
機械系統注意事項
為了實現微步進所需的精度,設計人員還必須考慮機械系統。
利用步進電機來產生線性運動的方法有多種。第一種方法是通過皮帶和皮帶輪將電機連接至運動部件。在這種情況下,旋轉被轉換為線性運動。線性運動的距離為電機運動角度和皮帶輪直徑的函數。 買電子元器件現貨上唯樣商城
第二種方法是使用螺桿或滾珠螺桿。步進電機直接連接至螺桿末端,當螺桿旋轉時,螺帽以線性方式行進。
在這兩種情況下,單步微步進是否可以實現實際的線性運動取決于摩擦扭矩。這意味著,為了獲得最佳精度,必須將摩擦扭矩降至最低。
例如,許多螺桿和滾珠螺桿螺帽都具有一定的預緊力可調性。預緊力是一種用于防止反沖的力,反沖會在系統中引起一些間隙。然而,增加預緊力會減少反沖,但也會增加摩擦力。因此,需要在反沖與摩擦力之間進行權衡。
結論
在使用步進電機設計運動控制系統時,不能假設電機的額定保持扭矩在微步進模式下仍然適用,因為在這種模式下增量扭矩會大大降低,這可能導致意外的定位錯誤。上述測試已經證明了這一點。在某些情況下,增加微步進分辨率并不能提高系統精度。
為了克服這些限制,建議盡量減少電機上的扭矩負載,或使用具有更高額定保持扭矩的電機。通常情況下,最好的解決方案是為機械系統設計更大的步進增量,而不是依賴精細的微步進。像 MP6500 這樣的步進電機驅動器以 1/8 步進模式提供的機械性能,是能夠與昂貴的傳統微步進驅動器相媲美的。
來源:MPS
審核編輯 黃昊宇
-
MPS
+關注
關注
26文章
259瀏覽量
64125 -
微步進電機
+關注
關注
0文章
4瀏覽量
965
發布評論請先 登錄
相關推薦
MS41929——雙通道超低噪聲 256 細分微步進低壓電機驅動
MS41919——雙通道超低噪聲 256 細分微步進低壓電機驅動
背鉆設計時要優先保證哪一項,STUB長度真的是越短越好嗎
AMEYA360:納芯微高集成單芯片SoC如何高效智能控制車載步進電機?
什么是虛擬機?虛擬機真的那么好用嗎?

微步控制步進電機驅動NSD8381調試指南

步進電機驅動器在驅動步進電機時,如果采用細分模式,那么電機里面的繞組的正弦波電流里面是有負值的嗎?
如何調整二相步進電機的步進角度,控制步進角度的功能?





 工商網監
工商網監
評論