") 從L1到L5自動(dòng)駕駛升級(jí) 三種關(guān)鍵傳感器應(yīng)該如何選?
從L1到L5自動(dòng)駕駛升級(jí) 三種關(guān)鍵傳感器應(yīng)該如何選?
自動(dòng)駕駛汽車是一種能夠感知環(huán)境并在無人參與的情況下運(yùn)行的車輛,它能做有經(jīng)驗(yàn)的人類駕駛員所做的一切。在最近的一項(xiàng)研究中,專家們確定了自動(dòng)駕駛汽車的三種發(fā)展趨勢,即車輛的自動(dòng)化、電氣化和共享化。如果這“三化”同時(shí)作用,將釋放自動(dòng)駕駛汽車的全部潛力,預(yù)計(jì)到2050年,將引發(fā)城市交通的第三次革命,屆時(shí)交通擁堵將得到極大緩解,運(yùn)輸成本將降低40%,全球城市二氧化碳排放量減少80%。
自動(dòng)駕駛的6個(gè)等級(jí)
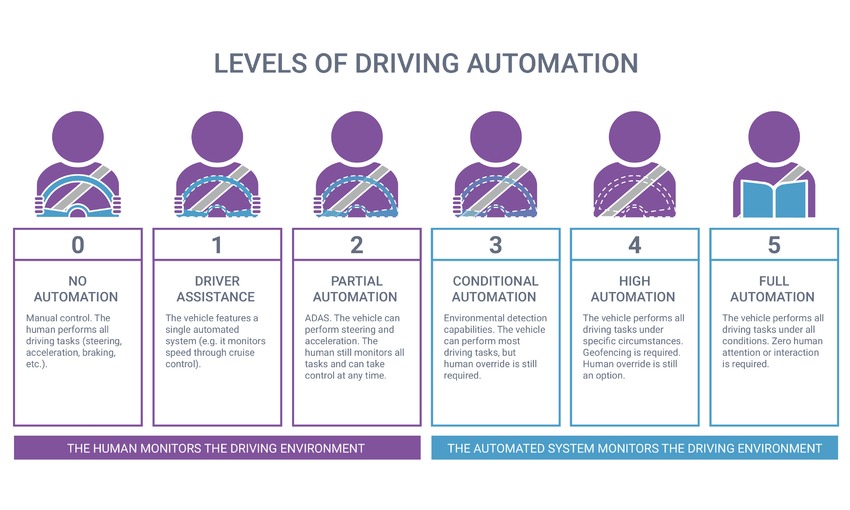
對(duì)于許多人來說,自動(dòng)駕駛或無人駕駛是一項(xiàng)復(fù)雜而有爭議的技術(shù),對(duì)“無人化”的理解也有較大差異。為此,美國汽車工程師學(xué)會(huì)(SAE)定義了6個(gè)無人駕駛等級(jí),包括從L0級(jí)(完全手動(dòng))到L5級(jí)(完全自動(dòng))。目前,這些無人駕駛等級(jí)準(zhǔn)則已經(jīng)被美國交通部采納。業(yè)界也普遍接受這6個(gè)等級(jí)劃分。
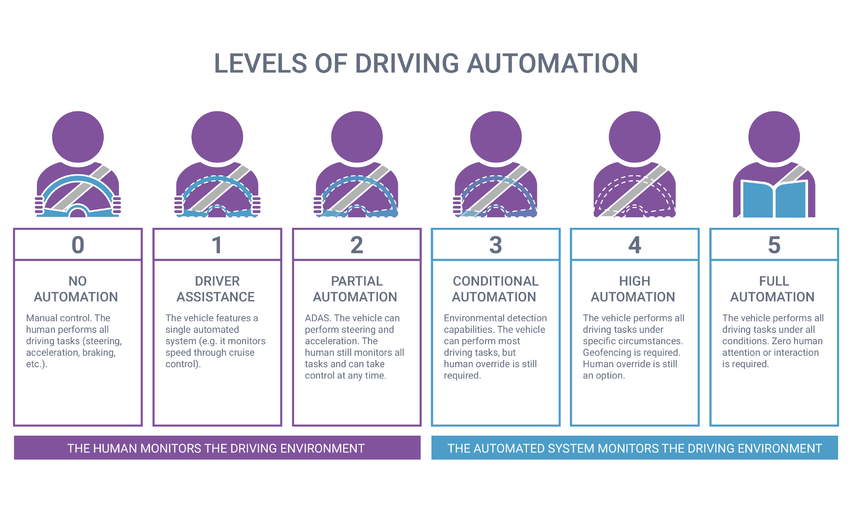
圖1:自動(dòng)駕駛的6個(gè)等級(jí)(圖源:Synopsys)
L0級(jí)(無自動(dòng)駕駛)
在當(dāng)今道路上行駛的大多數(shù)汽車都屬于L0級(jí),這種手動(dòng)控制的車輛全部由人類駕駛員完成動(dòng)態(tài)駕駛?cè)蝿?wù),盡管其中可能有相應(yīng)的系統(tǒng)來輔助駕駛員,例如緊急制動(dòng)系統(tǒng),但從技術(shù)上講,該輔助系統(tǒng)并未主動(dòng)“驅(qū)動(dòng)”車輛。
L1級(jí)(駕駛員輔助)
這是自動(dòng)化的最低級(jí)別。車輛具有單獨(dú)的自動(dòng)化駕駛員輔助系統(tǒng),例如轉(zhuǎn)向或加速(巡航控制)。人類駕駛員負(fù)責(zé)與操作汽車相關(guān)的所有任務(wù),包括加速、轉(zhuǎn)向、制動(dòng)和監(jiān)控周圍環(huán)境。
L2級(jí)(部分自動(dòng)駕駛)
在這個(gè)級(jí)別上,汽車中的自動(dòng)化系統(tǒng)可以輔助轉(zhuǎn)向和加速,而駕駛員仍然負(fù)責(zé)大部分安全關(guān)鍵功能和環(huán)境監(jiān)控。車輛配備有高級(jí)駕駛員輔助系統(tǒng)(ADAS),能夠控制轉(zhuǎn)向以及加速或減速。目前,L2級(jí)是道路上最常見的自動(dòng)駕駛汽車。特斯拉的 Autopilot 和凱迪拉克的(通用汽車)Super Cruise 系統(tǒng)都符合 L2級(jí)標(biāo)準(zhǔn)。
L3級(jí)(受條件制約的自動(dòng)駕駛)
從L3級(jí)開始,汽車本身利用自動(dòng)車輛傳感器監(jiān)測環(huán)境,并執(zhí)行其他動(dòng)態(tài)駕駛?cè)蝿?wù),如制動(dòng)。如果在駕駛過程中出現(xiàn)系統(tǒng)故障或其他意外情況,駕駛員必須做好干預(yù)準(zhǔn)備。從技術(shù)角度來看,從L2級(jí)到 L3級(jí)實(shí)現(xiàn)了重大飛躍,但從駕駛?cè)藛T的角度來看,差別算不上太明顯。奧迪公司曾將2019年入市的奧迪A8L定義為L3 級(jí)自動(dòng)駕駛,車輛采用Traffic Jam Pilot技術(shù),該技術(shù)結(jié)合了激光雷達(dá)以及先進(jìn)的傳感器融合技術(shù)和處理能力。但根據(jù)美國對(duì)自動(dòng)駕駛汽車的監(jiān)管程序,目前奧迪A8L在美國仍被歸類為L2級(jí)自動(dòng)駕駛汽車。
L4級(jí)(高度自動(dòng)駕駛)
L4級(jí)與高度自動(dòng)化相關(guān),即使在極端情況下,汽車也能夠在不受駕駛員干預(yù)的情況下完成整個(gè)行程。但是,也有一些限制:只有當(dāng)系統(tǒng)檢測到交通狀況安全且沒有交通堵塞時(shí),駕駛員才能將車輛切換到該模式。L3級(jí)和L4級(jí)自動(dòng)化之間的關(guān)鍵區(qū)別在于,如果發(fā)生意外或系統(tǒng)失效,L4級(jí)自動(dòng)駕駛汽車可以進(jìn)行干預(yù)。雖然L4級(jí)自動(dòng)駕駛汽車可以采用無人駕駛模式運(yùn)行,但由于立法和基礎(chǔ)設(shè)施發(fā)展欠缺,L4級(jí)無人駕駛汽車只能在限定區(qū)域行駛,這被稱之為地理圍欄(Geofencing)。
L5級(jí)(完全自動(dòng)駕駛)
L5級(jí)自動(dòng)駕駛汽車將沒有任何人為控制的規(guī)定,甚至沒有方向盤或加速/制動(dòng)踏板。他們將不受地理圍欄限制,能夠去任何地方并完成任何有經(jīng)驗(yàn)的人類駕駛員可以完成的操控。全自動(dòng)駕駛汽車尚不存在,但汽車制造商正在努力實(shí)現(xiàn)L5級(jí)自動(dòng)駕駛,目前只是在幾個(gè)試點(diǎn)區(qū)進(jìn)行測試。
未來可期的自動(dòng)駕駛市場
自動(dòng)駕駛已經(jīng)不再是一件新鮮事務(wù),研究人員預(yù)測,到 2025 年,我們將看到大約800萬輛無人或半無人汽車在路上行駛。Fortune Business Insights在其《2021-2028年自動(dòng)駕駛汽車市場》的報(bào)告中表示,傳感器處理技術(shù)、自適應(yīng)算法、高清晰度映射以及車輛到基礎(chǔ)設(shè)施(V2I)和車輛到車輛(V2V)通信技術(shù)的快速發(fā)展,讓許多公司放心擴(kuò)大其制造和研發(fā)能力,并將車輛自動(dòng)化提升到更高的水平。2020年,全球自動(dòng)駕駛汽車市場規(guī)模約為14.5億美元。預(yù)計(jì)在2021-2028年間,市場將從2021年的16.4億美元增長到2028年的110.3億美元,年均復(fù)合增長率為31.3%。
市場調(diào)研機(jī)構(gòu)Mordor intelligence認(rèn)為,由于越來越嚴(yán)格的政府法規(guī)側(cè)重于提高道路安全,更多的自動(dòng)駕駛汽車正在開發(fā)中,它們采用了與智能手機(jī)集成的先進(jìn)技術(shù),為市場參與者創(chuàng)造了吸引客戶的機(jī)會(huì)。人工智能、機(jī)器學(xué)習(xí)以及雷達(dá)、激光雷達(dá)、GPS和計(jì)算機(jī)視覺等其他傳感器領(lǐng)域的最新技術(shù)進(jìn)步,使制造商能夠有效提高汽車的自動(dòng)駕駛能力。目前,L2級(jí)和L3級(jí)自動(dòng)駕駛汽車在市場上最為突出,而L4級(jí)和L5級(jí)預(yù)計(jì)將在2030年獲得更廣泛的認(rèn)可。因此,預(yù)計(jì)在預(yù)測期內(nèi),這些L2級(jí)和L3級(jí)車的增長將是市場的主要推手。因此,自2022年到2027年這5年間,自動(dòng)駕駛汽車市場的復(fù)合年增長率將達(dá)到22.75%。
隨著ADAS和安全功能的越來越多采用、政府對(duì)提高車輛和行人安全的關(guān)注以及汽車制造企業(yè)提供先進(jìn)安全功能的意愿,多方合力,將刺激市場對(duì)自動(dòng)駕駛汽車的需求。根據(jù)Markets and Markets發(fā)布的最新市場研究報(bào)告,全球自動(dòng)駕駛汽車的市場規(guī)模預(yù)計(jì)將從2021年的2030萬輛增長到2030年的6240萬輛,年復(fù)合增長率為13.3%。
根據(jù)福特、本田、豐田、沃爾沃等汽車制造商的公開聲明,目前,自動(dòng)駕駛汽車市場仍以L2級(jí)車輛為主,到2030年,全球自動(dòng)駕駛車輛的總注冊(cè)份額將達(dá)到12%。
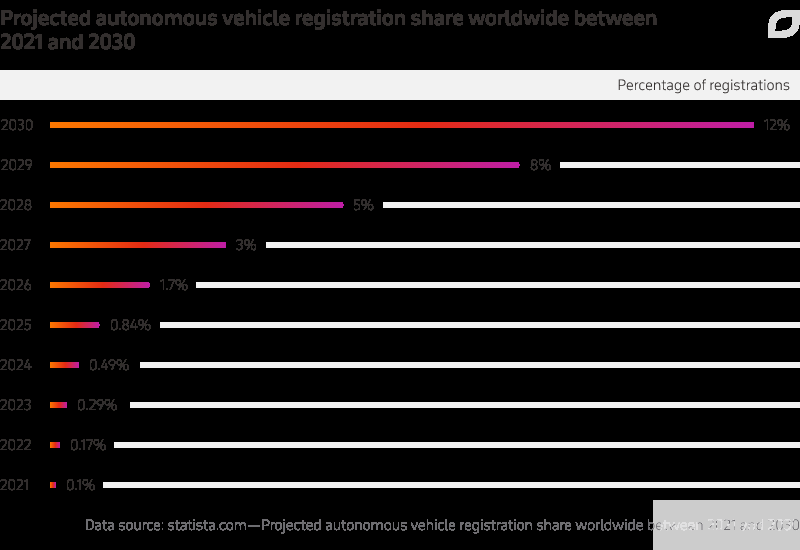
圖2:到2030年,全球自動(dòng)駕駛車輛的總注冊(cè)份額將達(dá)到12%
(圖源:Statista.com)
自動(dòng)駕駛中的3種重要傳感器
要想充分理解車輛的自動(dòng)化水平就要先了解自動(dòng)駕駛汽車是如何工作的。總體來看,自動(dòng)駕駛汽車主要依靠傳感器、執(zhí)行器、復(fù)雜算法、機(jī)器學(xué)習(xí)系統(tǒng)和強(qiáng)大的處理器來運(yùn)行軟件并執(zhí)行自動(dòng)化操作。
具體來看,自動(dòng)駕駛汽車主要基于位于車輛不同部位的各種傳感器,創(chuàng)建并維護(hù)其周圍環(huán)境的地圖。如今,大多數(shù)汽車制造商在自動(dòng)駕駛汽車中最常使用的傳感器有三種,即:攝像頭(camera)、雷達(dá)(radar)和激光雷達(dá)(Lidar)。
其中,雷達(dá)傳感器負(fù)責(zé)監(jiān)測附近車輛的位置。攝像頭用來探測交通信號(hào)燈、閱讀路標(biāo)、追蹤其他車輛,并尋找行人。激光雷達(dá)傳感器將光脈沖反射到汽車周圍,以測量距離、檢測道路邊緣并識(shí)別車道標(biāo)記。停車時(shí),車輪上的超聲波傳感器會(huì)檢測路緣和其他車輛。然后,大量的軟件會(huì)處理所有這些“感官”輸入,繪制路徑,并向汽車的執(zhí)行器發(fā)送指令,由執(zhí)行器控制車輛的加速、制動(dòng)和轉(zhuǎn)向。此外,通過自動(dòng)駕駛汽車中的傳感器收集的信息,如前方的實(shí)際路徑、交通堵塞和道路上的任何障礙物,也可以在通過M2M技術(shù)連接的汽車之間共享,這就是車聯(lián)網(wǎng)中的車對(duì)車(V2V)通信,它對(duì)駕駛自動(dòng)化非常有用。可以這樣說,如果沒有傳感器,自動(dòng)駕駛是不可能實(shí)現(xiàn)的。
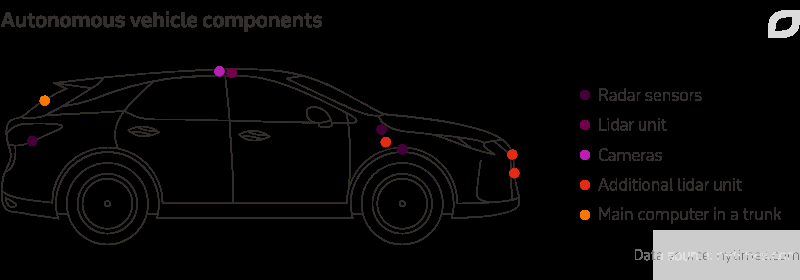
圖3:自動(dòng)駕駛汽車中三種最重要的傳感器
(圖源:nytimes.com)
1 攝像頭傳感器
自動(dòng)駕駛汽車通常都會(huì)配有視覺攝像頭,它也是最直觀的傳感器,其工作原理與我們的眼睛類似。攝像頭傳感器具備檢測RGB顏色信息的能力,可提供百萬像素的分辨率,這兩大特性相結(jié)合,使其成為“閱讀”交通標(biāo)志和其他應(yīng)用不可或缺的設(shè)備。通過在各個(gè)角度為車輛配備這些攝像頭,車輛能夠保持其外部環(huán)境的360°視圖,攝像頭可以產(chǎn)生與人類駕駛員非常相似的自動(dòng)駕駛體驗(yàn)。如今,攝像頭已經(jīng)成為ADAS最重要的組成部分,并得到廣泛的部署。
正在興起的3D攝像頭可以用來顯示非常詳細(xì)和逼真的圖像。這些圖像傳感器自動(dòng)檢測物體,對(duì)其進(jìn)行分類,并確定它們與車輛之間的距離。例如,攝像頭可以輕松識(shí)別其他車輛、行人、騎自行車者、交通標(biāo)志和信號(hào)、道路標(biāo)記、橋梁和護(hù)欄。
■ 與其他類型的傳感器相比,攝像頭不僅視圖直觀且價(jià)格相對(duì)便宜。這一優(yōu)勢使得原始設(shè)備制造商在沒有太大成本壓力下將更好的自動(dòng)駕駛功能引入到中檔甚至低端車輛中。
■ 攝像頭傳感器的缺點(diǎn):在惡劣的天氣條件下,如雨、霧或雪,會(huì)使攝像頭無法清晰地看到道路上的障礙物,從而增加發(fā)生事故的可能性。此外,在很多情況下,來自攝像頭的圖像根本不足以讓計(jì)算機(jī)對(duì)汽車應(yīng)該做什么做出正確的決定。例如,在物體的顏色與背景非常相似或它們之間的對(duì)比度很低的情況下,算法可能會(huì)失敗。
2 雷達(dá)傳感器
雷達(dá)是在第二次世界大戰(zhàn)之前發(fā)明的,從那時(shí)起被廣泛用于精確跟蹤飛機(jī)和船只的位置、速度和方向。1999年,梅賽德斯-奔馳(Mercedes-Benz)首次將其引入到汽車中以支持其自適應(yīng)速度功能。雷達(dá)傳感器對(duì)自動(dòng)駕駛的整體功能起著至關(guān)重要的作用,它們發(fā)出無線電波,檢測物體,并實(shí)時(shí)測量它們與車輛的距離和速度。短程和遠(yuǎn)程雷達(dá)傳感器通常都部署在車的四周,每個(gè)傳感器都有不同的功能。雖然短程(24GHz)雷達(dá)應(yīng)用能夠?qū)崿F(xiàn)盲點(diǎn)監(jiān)控、理想的車道保持輔助和停車輔助,但遠(yuǎn)程(77GHz)雷達(dá)傳感器的作用包括自動(dòng)距離控制和制動(dòng)輔助。
■ 雷達(dá)的優(yōu)點(diǎn):雷達(dá)發(fā)射的無線電波在傳輸時(shí)幾乎不受能見度、光線和噪音的影響,其性能在所有環(huán)境條件下都是一致的,哪怕在霧天或雨天識(shí)別物體時(shí)通常也沒有問題。這是它與攝像頭和激光雷達(dá)的顯著不同點(diǎn)。
■ 雷達(dá)傳感器的缺點(diǎn):雷達(dá)的主要弱點(diǎn)一是無法捕獲顏色信息,二是與攝像頭和激光雷達(dá)傳感器相比,其角度分辨率也比較有限,即在模擬物體的精確形狀方面相對(duì)較弱。如今車輛上使用的汽車?yán)走_(dá)傳感器只能正確識(shí)別90%到95%的行人,不能確保道路的安全性。此外,仍然廣泛使用的2D雷達(dá)無法準(zhǔn)確確定物體的高度,因?yàn)閭鞲衅髦荒芩綊呙瑁@可能會(huì)導(dǎo)致在橋下或路標(biāo)下行駛時(shí)出現(xiàn)各種問題。為了解決這些問題,目前傳感器企業(yè)正在加緊開發(fā)更多種類的3D雷達(dá)傳感器甚至4D成像傳感器。
3 激光雷達(dá)傳感器
激光雷達(dá)傳感器的工作原理與雷達(dá)類似,唯一的區(qū)別是它們使用激光而不是無線電波。除了測量到道路上各種物體的距離外,激光雷達(dá)還允許創(chuàng)建檢測到的物體的三維圖像,并繪制周圍環(huán)境的地圖。此外,激光雷達(dá)可以配置為在車輛周圍創(chuàng)建完整的360°地圖。這兩個(gè)優(yōu)勢也是谷歌、豐田等自動(dòng)駕駛汽車制造商選擇激光雷達(dá)的主要原因。
■ 激光雷達(dá)的優(yōu)點(diǎn):高清晰度3D建模。激光雷達(dá)可以看作是一種更先進(jìn)的雷達(dá),它的探測范圍最遠(yuǎn)可達(dá)100米,計(jì)算誤差不到兩厘米。因此,它能夠在任何時(shí)刻測量數(shù)千個(gè)點(diǎn),從而對(duì)周圍環(huán)境進(jìn)行非常精確的3D描繪。與雷達(dá)一樣,激光雷達(dá)的效能同樣不受環(huán)境條件的影響。
■ 激光雷達(dá)的缺點(diǎn):技術(shù)復(fù)雜且價(jià)格昂貴。為了提供精確的環(huán)境三維模型,激光雷達(dá)每秒計(jì)算數(shù)十萬個(gè)點(diǎn),并將它們轉(zhuǎn)換為動(dòng)作。這意味著與攝像頭和雷達(dá)相比,激光雷達(dá)需要大量的計(jì)算能力。這也使得激光雷達(dá)容易出現(xiàn)系統(tǒng)故障和軟件故障。成本高是激光雷達(dá)的另一短板,它比用于自動(dòng)駕駛車輛的雷達(dá)傳感器要昂貴得多。
為自動(dòng)駕駛車輛選擇正確的傳感器
攝像頭、雷達(dá)、激光雷達(dá),這三種傳感器各有優(yōu)缺點(diǎn)。因此,大多數(shù)原始設(shè)備制造商常常使用三者中至少兩個(gè)的組合,以相互補(bǔ)充,彌補(bǔ)不足。當(dāng)結(jié)合使用時(shí),傳感器技術(shù)可以讓車輛在幾乎不需要人工干預(yù)的情況下安全行駛。隨著傳感器技術(shù)的日益成熟,預(yù)計(jì)未來五年將有越來越多的車輛達(dá)到L3--L4級(jí)的自動(dòng)駕駛水平。
作為工程師和設(shè)計(jì)師,需要仔細(xì)考慮每種傳感器類型的作用、能力和局限性,以確定這些傳感器的正確組合能夠滿足最終用戶在安全性、功能性能和價(jià)格方面的需求。
高分辨率數(shù)碼攝像頭幫助車輛“看到”周圍的環(huán)境,當(dāng)多個(gè)攝像頭安裝在車輛周圍時(shí),360°視圖允許車輛檢測其附近的物體,如其他車輛、行人、道路標(biāo)記和交通標(biāo)志。常用的(找元器件現(xiàn)貨上唯樣商城)攝像頭傳感器包括近紅外攝像頭(NIR)、VIS攝像頭、熱攝像頭和飛行時(shí)間攝像頭(ToF)。與大多數(shù)傳感器一樣,攝像頭在相互補(bǔ)充時(shí)工作得最好。如今的汽車后部和360°視覺圖像系統(tǒng)通常采用集中式架構(gòu)。這意味著中央控制單元處理四到六個(gè)攝像頭的原始數(shù)據(jù)。由于處理是在軟件中完成的,對(duì)處理器也會(huì)有苛刻的要求。2D和3D相機(jī)都需要圖像傳感器,并要求其動(dòng)態(tài)范圍超過130dB。這種高動(dòng)態(tài)范圍是提供清晰圖像的必備需求,目前市面上最好的圖像傳感器的動(dòng)態(tài)范圍已經(jīng)達(dá)到140dB。
安森美(onsemi)AR0820AT 830萬像素 CMOS數(shù)字圖像傳感器針對(duì)微光和高動(dòng)態(tài)范圍場景進(jìn)行了優(yōu)化,安森美半導(dǎo)體的 AR0820AT 是一款 1/2 英寸 CMOS 數(shù)字圖像傳感器,具有2.1微米DR-Pix BSI像素和片上140 dB HDR捕獲能力。
該傳感器包含的先進(jìn)功能還有像素內(nèi)分選、開窗以及視頻和單幀模式,以提供靈活的感興趣區(qū)域(ROI),適用于低光度和具有挑戰(zhàn)性的高動(dòng)態(tài)范圍場景。先進(jìn)的晶圓堆疊技術(shù)更是實(shí)現(xiàn)了低功耗和緊湊的封裝設(shè)計(jì)。此外,AR0820AT滿足歐洲NCAP 2020等ADAS系統(tǒng)相關(guān)標(biāo)準(zhǔn)的能力還解決了安全性問題。AutoX是中國首家在公共道路上運(yùn)營全無人駕駛的RoboTaxi服務(wù)的公司,在其解決方案中使用了28個(gè)安森美半導(dǎo)體的圖像傳感器。

圖4:AR0820AT CMOS數(shù)字圖像傳感器
(圖源:onsemi)
事故統(tǒng)計(jì)數(shù)據(jù)顯示,76%的事故完全是由人為失誤造成的。在所有案例中,94%涉及人為錯(cuò)誤。雷達(dá)傳感器是現(xiàn)代汽車中高級(jí)駕駛員輔助系統(tǒng)(ADAS)不可或缺的一部分。雷達(dá)傳感器不僅對(duì)于自動(dòng)駕駛汽車尤為重要,它們還能有效提高駕駛員的安全性和舒適性。目前的雷達(dá)系統(tǒng)要么基于24 GHz,要么基于77 GHz。77GHz的優(yōu)勢主要在于距離和速度測量的更高精度,以及更精確的角度分辨率。與24GHz相比,天線尺寸更小,干擾問題更低。汽車?yán)走_(dá)傳感器通常用于盲點(diǎn)檢測(BSD)、車道變換輔助(LCA)、碰撞緩解(CM)、停車輔助(PA)和后方交叉路口警報(bào)(RCTA)功能。
英飛凌(Infineon)提供種類繁多的汽車?yán)走_(dá)傳感器,包括短程、中程和遠(yuǎn)程雷達(dá)傳感器。作為XENSIV系列傳感器的一部分,英飛凌擁有一系列RASIC 77/79GHz前端雷達(dá)傳感器 IC,專門用于駕駛輔助系統(tǒng),例如自適應(yīng)巡航控制和碰撞警告。
這些RASIC解決方案能夠檢測和識(shí)別最遠(yuǎn)250米范圍內(nèi)的物體,使駕駛員輔助功能能夠獲得Euro NCAP(歐洲新車評(píng)估計(jì)劃)的五星級(jí)評(píng)級(jí)。此外,RASIC 77/79GHz 汽車?yán)走_(dá)支持ASIL C,減少了客戶的研發(fā)工作。這些77GHz芯片可用于基于雷達(dá)的駕駛員輔助系統(tǒng),能識(shí)別250米范圍內(nèi)的物體。作為對(duì)77/79 GHz 產(chǎn)品的補(bǔ)充,英飛凌還提供集成度非常高的24GHz雷達(dá)收發(fā)器系列,與分立產(chǎn)品系列相比,能節(jié)省約30%的PCB占位。
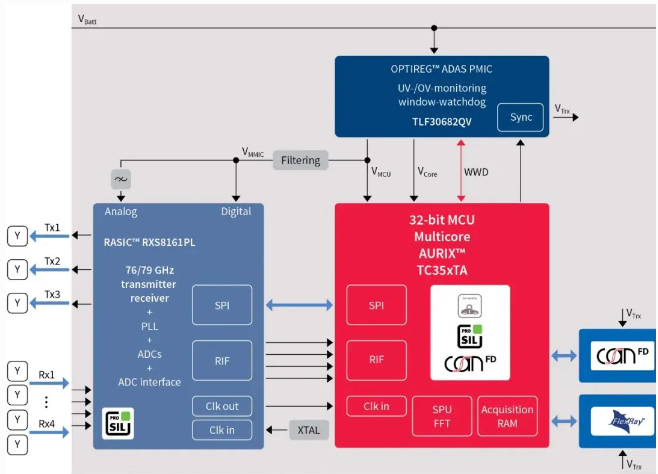
現(xiàn)在,英飛凌可提供一整套77/79GHz雷達(dá)芯片組,包括:雷達(dá)77/79GHz射頻毫米波IC系列(RASIC RXS816xPL),具有雷達(dá)信號(hào)處理單元的MCU系列(第二代AURIX TC3xx),具有多種安全功能的雷達(dá)系統(tǒng)電源TLF3068x,非常緊湊的3芯片配置(RXS816xPL+AURIX TC3xx+TLF3068x),非常適于從自動(dòng)緊急制動(dòng)(AEB)到自動(dòng)駕駛中的高分辨率雷達(dá)應(yīng)用。
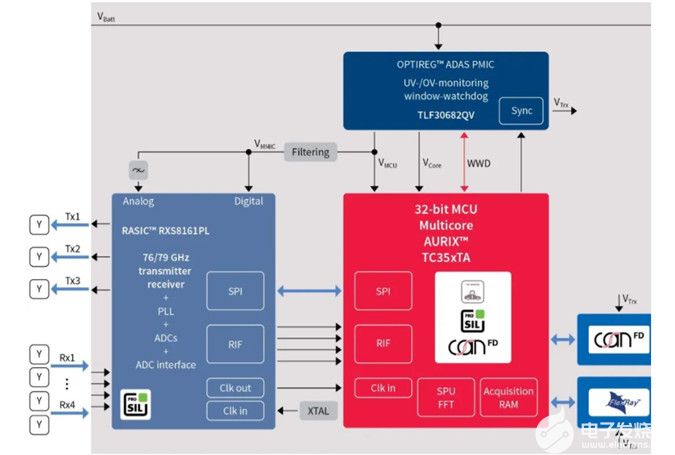
圖5:英飛凌77/79GHz雷達(dá)ECU
(圖源:Infineon)
前文提到,無法捕獲顏色信息,角度分辨率也比較有限是雷達(dá)比較明顯的弱點(diǎn)。然而,在通向L5級(jí)汽車自動(dòng)化的道路上,4D成像雷達(dá)為雷達(dá)創(chuàng)新創(chuàng)造了新的可能,在面向L2+的未來傳感器組合中,它也將承擔(dān)大部分工作。恩智浦(NXP)最新推出的高性能S32R45雷達(dá)處理器,為OEM提供了一條經(jīng)濟(jì)高效的途徑,幫助他們實(shí)現(xiàn)先進(jìn)的4D成像雷達(dá)功能,在L2+和更高級(jí)別的汽車上投入商用,具有適當(dāng)?shù)某杀窘Y(jié)構(gòu)。
S32R45是一款基于Arm Cortex-A53 和Cortex-M7 內(nèi)核的32位汽車?yán)走_(dá)應(yīng)用MPU,主要為民用汽車ADAS 雷達(dá)市場而設(shè)計(jì)。對(duì)于汽車ADAS雷達(dá)市場,S32R45 MPU適用于高端長距前向/后向雷達(dá)和高級(jí)雷達(dá)成像應(yīng)用,并且可以用作符合新車評(píng)價(jià)規(guī)范(NCAP)的高級(jí)域控制器,以可擴(kuò)展、安全可靠和高能效的方式提供高性能雷達(dá)處理。
S32R45雷達(dá)處理器是NXP第6代汽車?yán)走_(dá)芯片組系列中的旗艦產(chǎn)品,與NXP TEF82xx RFCMOS收發(fā)器結(jié)合使用,可提供高角度分辨率、強(qiáng)大處理能力和廣泛感測范圍。

圖6:NXP高性能S32R45雷達(dá)處理器
(圖源:NXP)
激光雷達(dá)主要由發(fā)射器、接收器和信號(hào)處理三部分組成,它在深度感知和確定物體存在方面非常精確。它可以遠(yuǎn)距離觀察,也可以穿越惡劣的環(huán)境條件,如夜間或雨霧。因?yàn)樗茏R(shí)別和分類所看到的東西,所以它能分辨出松鼠和石頭等物體之間的區(qū)別,并據(jù)此預(yù)測行為。按照測距原理的不同,激光雷達(dá)可以劃分為飛行時(shí)間測距法(ToF)、基于相干探測的 FMCW 測距法、以及三角測距法等。目前,市場上以 ToF 為技術(shù)路線的激光雷達(dá)公司數(shù)量較多。
Lidar是ADI公司自動(dòng)駕駛車輛感知檢測戰(zhàn)略的關(guān)鍵支柱。目前,集成在測試車輛上的傳統(tǒng)Lidar系統(tǒng)價(jià)格高昂。ADI公司在真正非機(jī)械式且經(jīng)濟(jì)高效的Lidar技術(shù)上進(jìn)行了大量投資,以促進(jìn)汽車Lidar系統(tǒng)的采納成為主流。ADI公司擁有豐富的高性能信號(hào)鏈和電源管理元件,可用于構(gòu)建幾乎任何Lidar系統(tǒng)。這些產(chǎn)品適用于脈沖或FMCW/連續(xù)波系統(tǒng),以及構(gòu)建在900 nm至1500 nm波長范圍內(nèi)的系統(tǒng)。

圖7:ADI公司提供的AD-FMCLIDAR1-EBZ 開發(fā)平臺(tái)助力Lidar系統(tǒng)的快速開發(fā)
(圖源:貿(mào)澤電子)
結(jié)語
根據(jù)Yole Development的報(bào)告,至少在2030年之前,L4/L5汽車的市場滲透率仍將保持在個(gè)位數(shù),其中一部分汽車將作為機(jī)器人汽車使用。隨著L0–L2汽車的市場滲透率開始下跌,L2+汽車的采用率將持續(xù)穩(wěn)定增長,截止2030年,L2+汽車很可能達(dá)到將近50%的市場份額。在未來十年內(nèi),預(yù)期L2+汽車將成為汽車OEM關(guān)注的焦點(diǎn)。
汽車傳感器是提高道路交通安全和達(dá)到L4級(jí)和L5級(jí)自動(dòng)駕駛的關(guān)鍵。隨著車輛走向完全自主駕駛,選擇正確的傳感器組合變得非常重要。為了獲得最高級(jí)別的安全性和性能,攝像頭、雷達(dá)、激光雷達(dá)之間的傳感器融合將最大限度地發(fā)揮每種傳感器的優(yōu)勢,同時(shí)彌補(bǔ)存在的不足。例如,單獨(dú)使用激光雷達(dá)對(duì)車道跟蹤的效果很差,但激光雷達(dá)和攝像頭的結(jié)合在這方面非常有效。可以預(yù)見,在先進(jìn)的傳感器技術(shù)的加持下,通過警告信號(hào)和自動(dòng)安全功能來預(yù)防事故,從而實(shí)現(xiàn)2050年交通事故中零死亡這一美好愿景也有望得到落實(shí)。
-
傳感器
+關(guān)注
關(guān)注
2548文章
50696瀏覽量
752037 -
雷達(dá)
+關(guān)注
關(guān)注
50文章
2903瀏覽量
117331 -
adas
+關(guān)注
關(guān)注
309文章
2168瀏覽量
208525 -
激光雷達(dá)
+關(guān)注
關(guān)注
967文章
3940瀏覽量
189602 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
783文章
13687瀏覽量
166152
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
未來已來,多傳感器融合感知是自動(dòng)駕駛破局的關(guān)鍵
從輔助駕駛到自動(dòng)駕駛: 感知型車輛建立在底層高質(zhì)量的傳感器數(shù)據(jù)基礎(chǔ)之上
小鵬汽車成為國內(nèi)首家預(yù)定德賽西威最新款自動(dòng)駕駛域控制器的主機(jī)廠
大量路測數(shù)據(jù)讓自動(dòng)駕駛方案日趨成熟,自動(dòng)駕駛汽車從概念走向落地
自動(dòng)駕駛技術(shù)發(fā)展的5個(gè)階段和現(xiàn)狀
高速路上的L5級(jí)自動(dòng)駕駛你能接受嗎?
韓國已制定出了半自動(dòng)駕駛汽車的安全標(biāo)準(zhǔn)
L3自動(dòng)駕駛還在炒作嗎
高通汽車總經(jīng)理:Snapdragon Ride能滿足L1到L5自動(dòng)駕駛所有需求
自動(dòng)駕駛l1和l2的區(qū)別

從L1到L5:自動(dòng)駕駛升級(jí),三種關(guān)鍵傳感器應(yīng)該如何選?
自動(dòng)駕駛升級(jí),三種關(guān)鍵傳感器應(yīng)該如何選





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論