") 了解關鍵應用程序對時間敏感網(wǎng)絡的需求
了解關鍵應用程序對時間敏感網(wǎng)絡的需求
在 10 Mbps 以太網(wǎng)的舊時代,早在 Time-Sensitive Networking 成為一種東西之前,最先進的共享網(wǎng)絡基本上要求數(shù)據(jù)包發(fā)生沖突。對于當時的原始技術來說,這是非常實用的……在計算上優(yōu)于任何需要仔細管理訪問介質的解決方案。
在破壞了彼此的數(shù)據(jù)后,兩個相互競爭的電臺將等待(隨機地浪費更多的時間),然后再嘗試傳輸。這被認為是正常的,因為最小大小的幀是 64 字節(jié)( 512 位),并且合理估計該幀將消耗導線的時間是基于網(wǎng)絡速度(每秒 1000 萬位意味著每個位需要約 0.1 微秒),因此 512 位至少等于 51.2 微秒。
以太網(wǎng)技術已從 80 年代初的 10 Mbps 發(fā)展到今天的 400Gbps ,未來計劃為 800Gbps 和 1.6Tbps (圖 1 )。
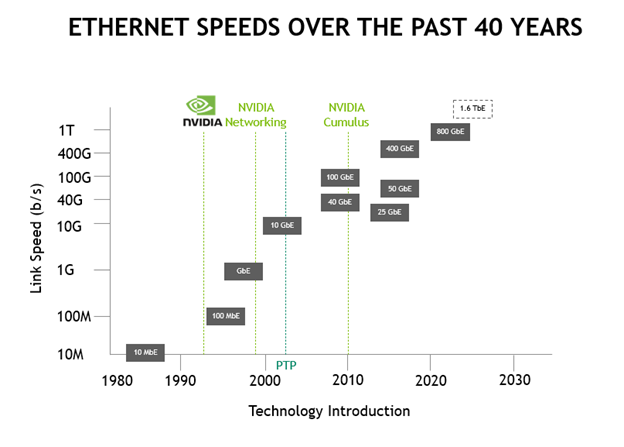
圖 1.以太網(wǎng)速度隨時間的演變
應該清楚的是,希望你的網(wǎng)絡運行得更快是一個持續(xù)的趨勢!因此,任何必須跨這些網(wǎng)絡管理事件的應用程序都需要一種同步良好、普遍理解的跨網(wǎng)絡時間感,時間分辨率隨著網(wǎng)絡速度的加快而逐漸變窄。
這就是為什么 IEEE 至少自 2008 年以來一直在研究如何支持對時間敏感的網(wǎng)絡應用程序,最初用于音頻和視頻應用程序,但現(xiàn)在用于更豐富、更重要的應用程序。
時間敏感網(wǎng)絡的三個用例
對精確和準確定時的要求超出了物理和數(shù)據(jù)鏈路層,擴展到高度依賴于來自網(wǎng)絡的可預測、可靠服務的某些應用程序。這些新興應用程序利用了對時間的精確、準確和高分辨率理解。
5G 、 6G 及以上
從 3GPP 的 5G 系列協(xié)議開始,一些應用程序(如物聯(lián)網(wǎng)或 IIoT )不一定需要極高的帶寬。它們確實需要嚴格控制對無線介質的訪問,以實現(xiàn)低延遲和低抖動的可預測訪問。這是通過向所有參與站提供精確、準確和高分辨率的時間來實現(xiàn)的。
在時域訪問方式中,每個站點請求并被授予使用介質的權限,然后網(wǎng)絡調度器通知站點他們可以使用介質的時間和持續(xù)時間。
5G 和未來網(wǎng)絡向所有參與站點提供準確、精確和高分辨率的時間,以實現(xiàn)這種新的高價值應用。以前,新網(wǎng)絡最理想的屬性是速度。這些新的應用程序實際上需要控制而不是速度。
成功啟用這些應用程序需要參與站對絕對時間具有相同的理解,以便它們不會太早或太遲開始傳輸,或傳輸錯誤的時間量。
如果一個電臺的傳輸時間過快或過長,它可能會干擾另一個電臺。如果它開始傳輸?shù)锰恚赡軙速M一些寶貴的機會來使用這種媒介,因為在這種情況下,它可能會傳輸?shù)臅r間少于它被允許傳輸?shù)臅r間。
我應該指出, 5G 顯然不是以太網(wǎng),但以太網(wǎng)技術是 5G 無線接入網(wǎng)絡如何通過從城域數(shù)據(jù)中心延伸出來的 backhaul 網(wǎng)絡連接在一起的。網(wǎng)絡的時間關鍵部分從以太網(wǎng)回程域擴展到數(shù)據(jù)中心和無線接入網(wǎng)絡。
什么樣的應用程序需要這樣的精度?
遙測等應用需要這種精度。未來的測量可以通過等待下一個讀數(shù)隱式地從錯過的讀數(shù)中恢復。例如,儀表讀數(shù)可能每 30 分鐘生成一次。
對于必須以亞毫秒分辨率理解其位置的機器人呢?丟失一些位置報告可能會損壞機器人,損壞附近或連接的設備,損壞機器人正在處理的材料,甚至導致附近人員死亡。
你可能會認為這與 5G 無關,因為它顯然是一個制造用例。在這種情況下, 5G 可能是更好的解決方案,因為精確時間協(xié)議( PTP )從一開始就內置在協(xié)議堆棧中。
PTP ( IEEE 1588-2008 )是一套協(xié)議和配置文件的基礎,這些協(xié)議和配置文件能夠在網(wǎng)絡設備之間以高精度和高分辨率同步高精度的時間。
時間敏感網(wǎng)絡技術使 5G (或后續(xù))網(wǎng)絡能夠服務于數(shù)千或上萬個節(jié)點。根據(jù)連接設備的需求,它提供了高速、可預測延遲或低抖動服務的不斷變化的組合。
是的,這些用戶可能是手機、工業(yè)機器人或醫(yī)療器械的普通用戶。關鍵是,通過內置時間敏感網(wǎng)絡,只要帶寬(和時間)可用,網(wǎng)絡可以滿足各種用例。
包含 NVIDIA Cumulus Linux 5.0 及更高版本的產品中的 PTP 實現(xiàn)定期提供深亞微秒(甚至亞微秒)精度,支持 5G 應用的各種要求。
媒體和娛樂
電視行業(yè)中的大多數(shù)視頻內容目前以串行數(shù)字接口( SDI )格式存在。然而,該行業(yè)正在向互聯(lián)網(wǎng)協(xié)議( IP )模式過渡。
在媒體和娛樂行業(yè),有幾種場景需要考慮,例如演播室(例如組合多個攝像機反饋和疊加)、視頻制作、視頻廣播(從單點到多個用戶)和多屏幕。
時間同步對于這些類型的活動至關重要。
在媒體和廣播領域,一致的時間同步對于提供最佳觀看體驗和防止幀對齊、假唱以及視頻和音頻同步問題至關重要。
在基帶世界中,參考黑或 genlock 用于保持相機和其他視頻源幀同步,并避免在從一個源切換到另一個源時引入令人討厭的偽影。
但是,隨著 IP 的采用,更具體地說,是 SMPTE-2110(或帶有 AES67 的 SMPTE-2022-6),您需要一種不同的方式來提供計時。隨之而來的是 PTP,也稱為 IEEE 1588 (PTP V2)。
PTP 完全基于網(wǎng)絡,可以在已經用于傳輸和接收基本流的相同數(shù)據(jù)網(wǎng)絡連接上傳輸。各種配置文件,如 SMPTE 2059-2 和 AES67 ,提供了一組標準化的配置和規(guī)則,以滿足不同類型分組網(wǎng)絡的要求。
Spectrum 完全支持 SMPTE 2059-2 和其他配置文件下的 PTP 1588 。
汽車應用
新一代的車載區(qū)域網(wǎng)絡( CAN )已從共享/總線架構發(fā)展到 5G 無線接入網(wǎng)絡( RAN )或 IT 環(huán)境中的架構:交換拓撲。
當涉及交換機時,可能會因爭用或緩沖而導致數(shù)據(jù)包丟失或延遲變化,從而限制或消除對汽車中各種應用程序可能需要的網(wǎng)絡的可預測訪問。
自動駕駛汽車必須定期以相當高的頻率處理視頻和其他傳感器輸入,以確定車輛的安全前進路徑。車輛中的引導智能取決于定期訪問其傳感器,因此網(wǎng)絡必須能夠保證對傳感器的訪問足夠頻繁,以支持必須解釋這些傳感器的算法的輸入。
例如,方向盤和制動器讀取摩擦力,啟用防抱死和防滑功能,并與摩擦制動相比權衡再生能量捕獲。視頻輸入,可能還有雷達和激光雷達(光探測和測距),不斷掃描前方道路。它們使解釋算法能夠確定是否出現(xiàn)了需要轉向、制動或停車的新障礙。
所有這些都是在車輛導航子系統(tǒng)使用 GPS 接收粗定位數(shù)據(jù)并將其與地圖對齊時發(fā)生的,地圖與攝像機的視覺輸入相結合,以建立隨時間變化的準確定位信息,確定法律允許的最大速度,并將法律限制與當?shù)貤l件相結合,以確定安全速度。
這些不同的傳感器和相關的獨立子系統(tǒng)必須能夠在可預測的延遲/低抖動的基礎上將其輸入傳送到主處理器及其自驅動算法,同時網(wǎng)絡還支持非延遲關鍵應用程序。整個系統(tǒng)的正確、可預測的運行對乘客(和行人!)至關重要。
除了支持車輛安全運行的傳感器和軟件外, CAN 上運行的其他應用程序對乘客來說仍然很重要,但顯然不是至關重要的:
操作通風或氣候控制系統(tǒng)以保持每個座椅的理想溫度(包括空氣運動、座椅加熱或冷卻等)
向各種乘客提供多個音頻或視頻內容流
與其他乘客或附近車輛上的乘客玩游戲
重要的日常維護活動,如測量輪胎的充氣壓力、蓄電池充電水平、制動效率(可能表明過度磨損)等
其他低頻但也具有時間關鍵性的傳感器輸入為車輛的自診斷提供了必要的輸入,以確定何時應將其帶回維修站進行維修,或僅為其電池充電。
要求所有這些不同的應用程序共享車輛中的同一物理網(wǎng)絡(在同一 CAN 上運行)是需要 PTP 的原因。
工程師將設計 CAN ,使其具有足夠的瞬時帶寬,以支持所有關鍵設備的最壞情況需求(例如爭用很少或不可能),同時動態(tài)允許所有設備請求訪問量和每個設備所需的延遲邊界,這些延遲邊界可以隨時間變化。有意使用雙關語。
在自動駕駛汽車的世界中, PTP 是實現(xiàn)車內技術的關鍵,支持車輛的安全運行,同時提供豐富的娛樂和舒適性。
結論
您已經看到了三個應用程序示例,其中對網(wǎng)絡訪問的控制與原始速度同等重要。在每種情況下,應用程序都定義了精確/準確/高分辨率計時的要求,但網(wǎng)絡使用通用機制來提供所需的服務。
隨著網(wǎng)絡速度的不斷加快,用于區(qū)分事件的時間分辨率與帶寬的倒數(shù)成線性比例。
強大的 PTP 實現(xiàn),例如 NVIDIA Cumulus Linux 5.0 設備中的實現(xiàn),體現(xiàn)了可擴展的協(xié)議機制,將適應未來更快的網(wǎng)絡。它們將提供定時精度和精度,以適應這些網(wǎng)絡不斷增長的速度。
未來的應用程序有望繼續(xù)收到他們所需的可預測的時間相關服務。即使網(wǎng)絡繼續(xù)以更快的速度、更細粒度的時間分辨率支持更多用戶,這也是事實。
關于作者
Peter Rizk 是 NVIDIA 網(wǎng)絡組的技術營銷總監(jiān),支持頻譜交換機、 Cumulus Linux 、 NetQ 和 NVIDIA Air 。他有超過 20 年的行業(yè)經驗,曾為蘋果、 3Com 、 PMC Sierra 和 Infoblox 工作。他在網(wǎng)絡、安全和存儲方面有著廣泛的背景。彼得獲得圣何塞州立大學計算機科學學士學位,職業(yè)生涯早期在加州大學圣克魯斯分校教授網(wǎng)絡課程。
審核編輯:郭婷
-
以太網(wǎng)
+關注
關注
40文章
5376瀏覽量
171116 -
物聯(lián)網(wǎng)
+關注
關注
2903文章
44275瀏覽量
371278 -
自動駕駛
+關注
關注
783文章
13684瀏覽量
166147
發(fā)布評論請先 登錄
相關推薦
如何讓波形圖或者波形圖表顯示絕對時間?
利用全局和后臺程序獲得程序運行絕對時間
波形圖表橫軸采樣數(shù)轉換相對時間
大神們好 labview波形圖表如何正確使用相對時間?
XY圖 X軸相對時間:波形圖選不了相對時間?
請問sy***ios6中bios ticks與cpu cycle數(shù)或者絕對時間之間的關系怎么設置?
通過陀螺儀測得的角速度對時間求積分的公式對嗎
時間敏感型網(wǎng)絡還有多遠?
如何使用空間鄰近搜索進行移動軌跡相對時間模式挖掘的方法資料說明
如何利用51單片機內部定時器實現(xiàn)對時間的操作

時間敏感型網(wǎng)絡(TSN)的發(fā)展處在哪個階段
如何讓FreeRTOS任務以絕對時間運行呢
虹科干貨 | TSN(時間敏感網(wǎng)絡)如何提升以太網(wǎng)性能?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論