 如何對RTK高精度定位算法進行驗證
如何對RTK高精度定位算法進行驗證
實時動態定位(Real Time Kinematic,RTK)是一種基于載波相位觀測值的相對定位技術。RTK高精度定位方法可以消除接收機及衛星鐘差、削弱衛星軌道、大氣層延遲等誤差源對定位的影響,獲得厘米級定位精度,因此得到了廣泛應用。仿真驗證技術正成為智能網聯技術開發和驗證的重要手段,對高精度定位技術的要求也不斷提升。定位算法作為高精度定位技術中的關鍵技術,那么在仿真環境下如何對RTK高精度定位算法進行有效的驗證與評價呢?
什么是RTK高精度定位技術?
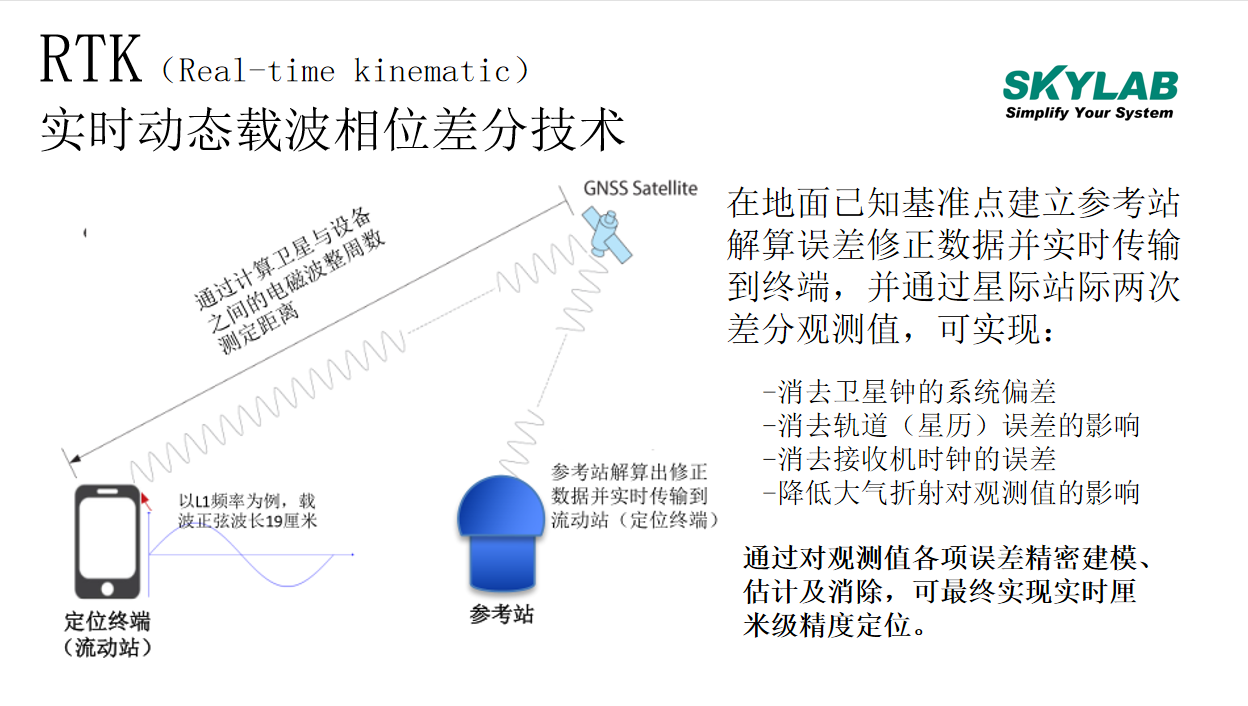
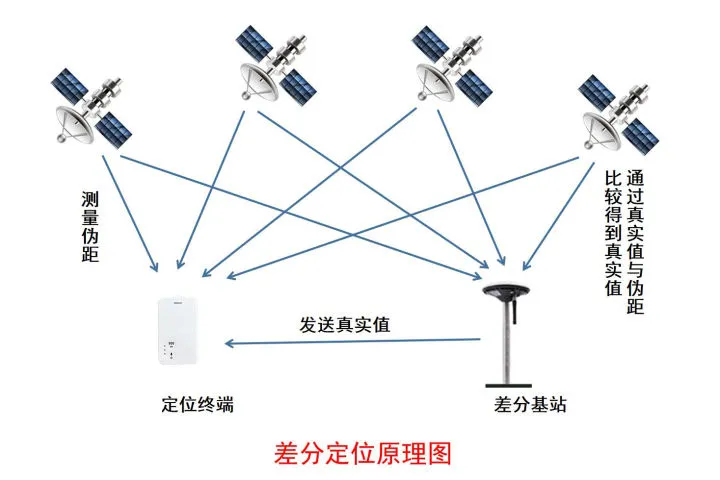
RTK高精度定位技術是GNSS系統獲取高精度實時動態定位的重要手段,RTK定位主要由三部分組成,分別是基準站接收機、移動站接收機以及兩站之間數據傳輸鏈路。RTK基準站將修正數據或采集的載波相位觀測值通過數據傳輸鏈路發送給建設在其數據傳輸范圍內的移動站,移動站接收機接收到的衛星觀測數據與基準站發送的數據進行相位差分定位的過程,即為RTK定位過程。
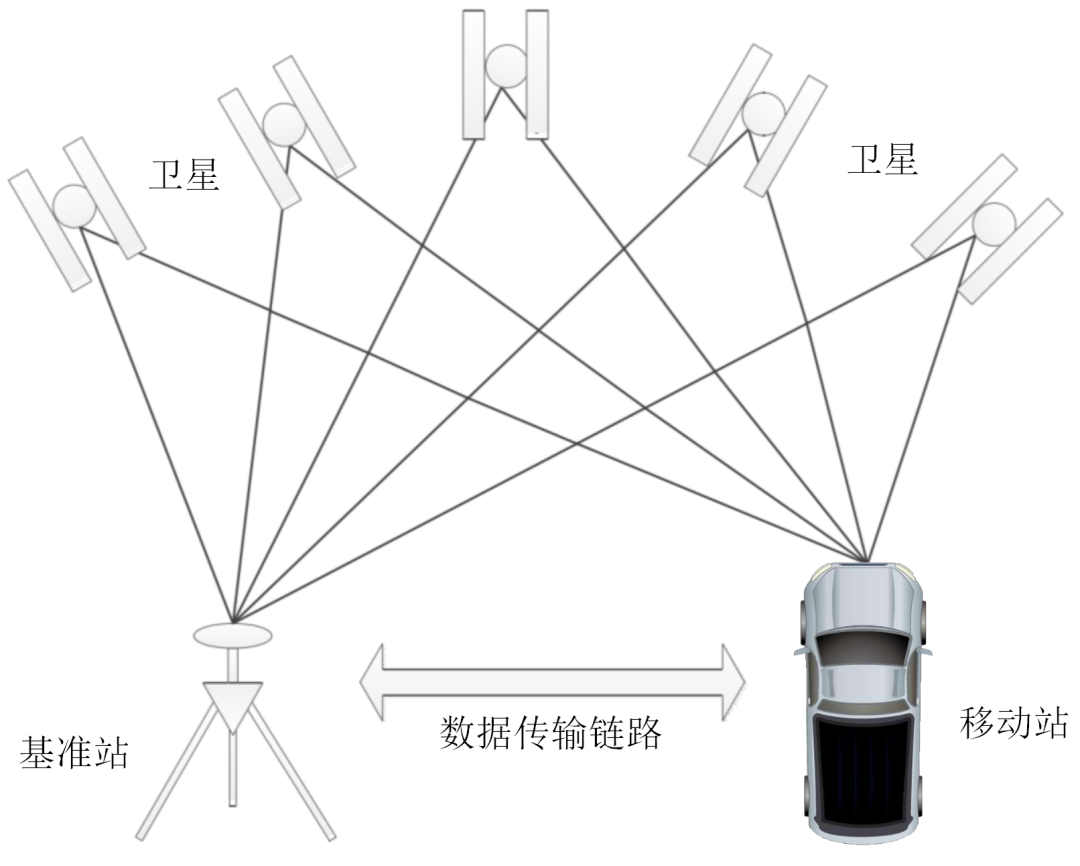
圖1RTK原理框圖
RTK定位方法使用基準站和移動站的同步觀測數據,但基準站數據傳輸存在延遲,導致獲得的定位結果滯后。通常的解決辦法是利用前一時刻移動站位置及接收的觀測數據,進行短時間延遲處理,作為虛擬基站的觀測數據,與當前時刻移動站接收的觀測數據,一起進行RTK定位解算。定位算法及數據處理流程如下圖所示:
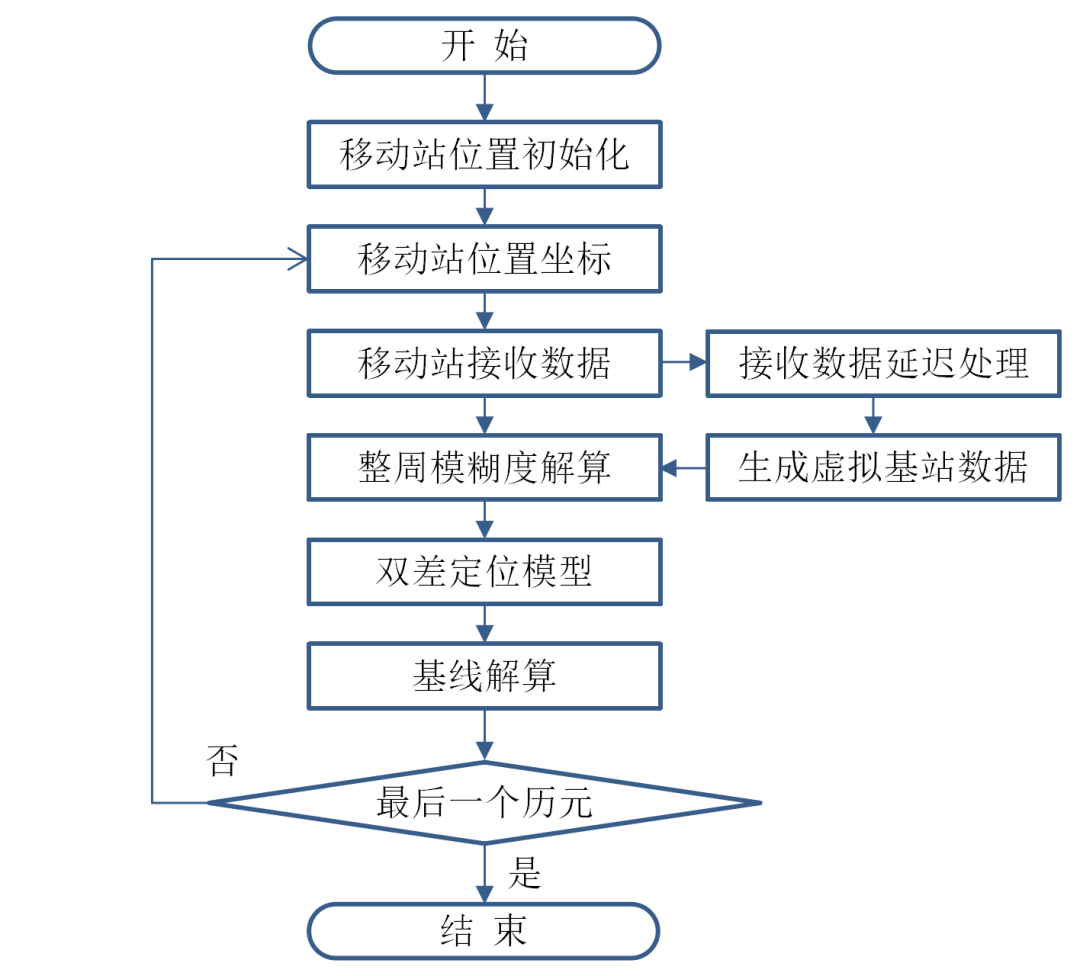
圖2 RTK定位算法框圖
如何進行RTK算法驗證?
中汽數據RTK高精度定位算法驗證系統是基于場景仿真軟件搭建虛擬的車輛行駛場景,同時利用衛星信號模擬器模擬出衛星信號及RTK基準站仿真的通信環境,進而對RTK高精度定位算法進行驗證與評價。系統架構如圖3所示,其中包括場景仿真軟件、衛星信號模擬器、RTK被測算法運行模塊、高性能上位機等。該驗證系統通過場景仿真軟件構建三維虛擬交通場景測試用例,在上位機中實時顯示測試場景中的三維信息及測試用例狀態,然后對場景數據進行篩選與分類,再將主車位置平面坐標轉換為經緯度坐標,與主車其它運動狀態信息一并以UDP的形式發送至衛星信號模擬器。模擬器根據以上信息對BDS/GPS等衛導系統的導航定位信號進行模擬,同時對RTK基準站的差分觀測數據進行仿真,并以標準的RTCM數據協議格式輸出數據。RTK定位算法運行模塊接收到以上數據后,由被測算法進行解算和處理,處理完成的結果數據再發送到上位機與場景仿真軟件的原始數據進行對比分析,進而對定位算法的測試與驗證進行客觀的評價,至此完成算法驗證的整個過程。
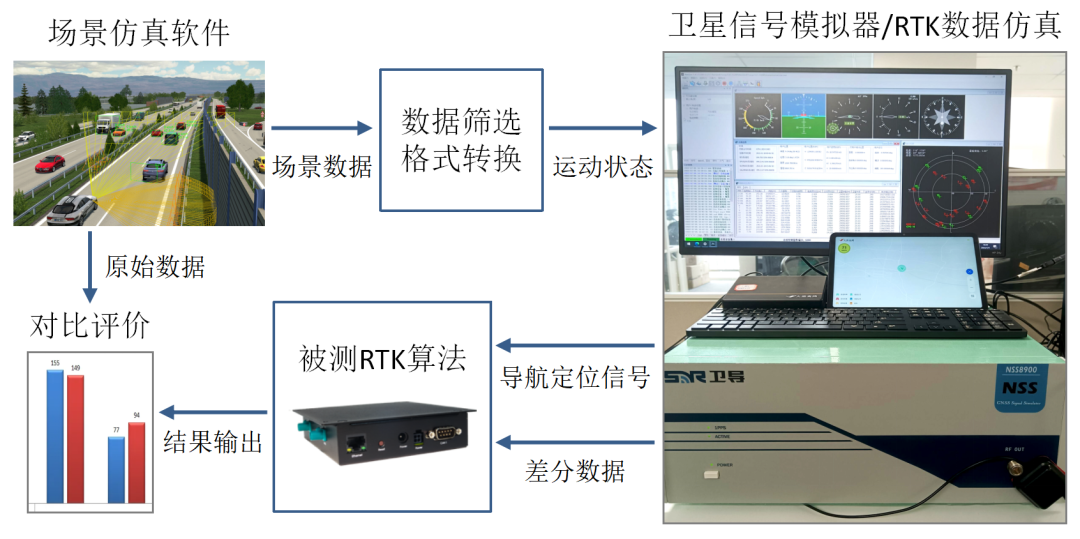
圖3RTK算法驗證系統架構
RTK算法驗證系統構成
場景仿真軟件
基于成熟的場景仿真軟件平臺,如VTD、Prescan、CarMaker等,設計并搭建交通場景,場景設計元素包含主車、遠車、其他交通參與者等模型,以及道路、環境及交通流等。
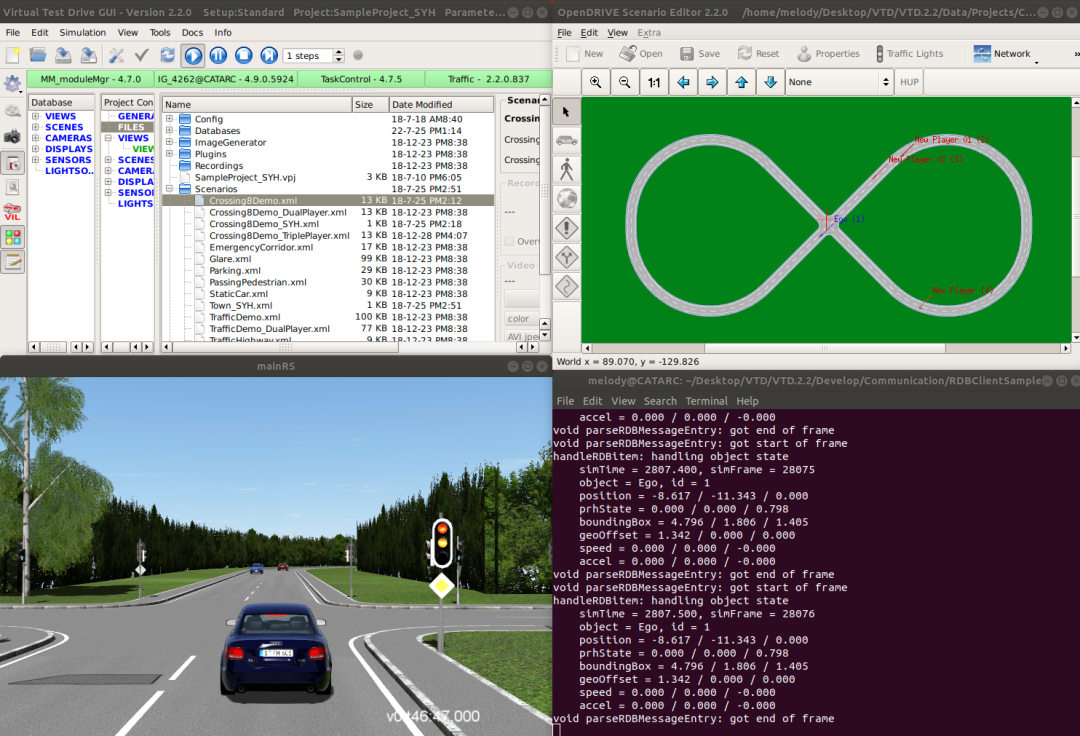
圖4場景仿真軟件VTD及其測試用例
數據處理插件
數據處理插件將場景仿真軟件構建的三維虛擬交通場景數據進行篩選與分類,然后將主車位置的平面坐標轉換為經緯度坐標,與主車其它運動狀態信息一并以UDP的形式發送至衛星信號模擬器。
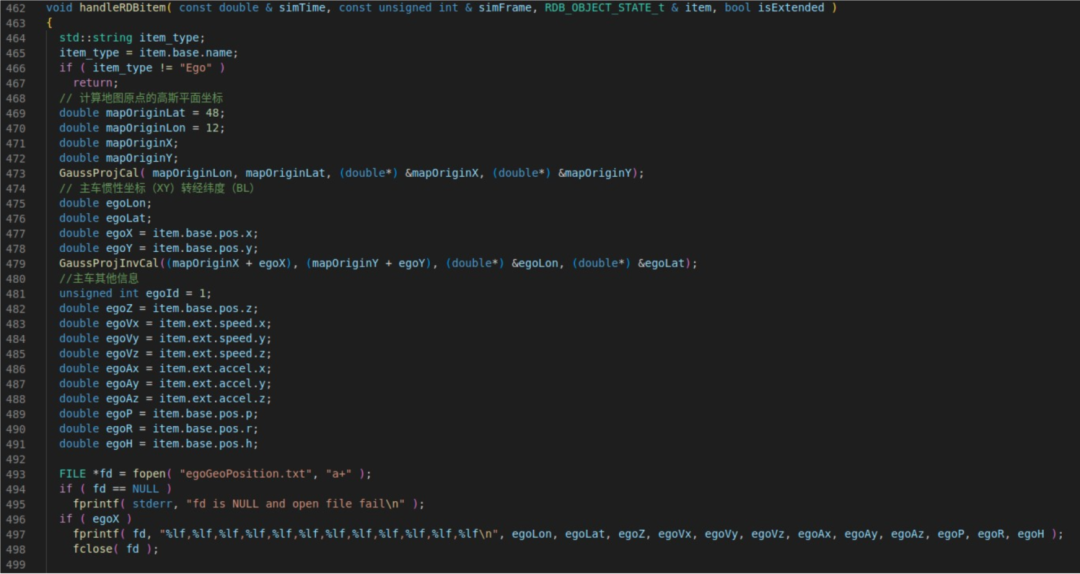
圖5數據處理插件關鍵代碼
GNS衛星信號模擬器
衛星信號模擬器具有先進的GNSS系統星座模型和多載體/多天線/多目標模擬,支持差分、定向、測姿和模擬編隊測試能夠模擬復雜多變的驗證環境/場景,根據不同的測試需求可對場景星座環境、信號模擬、載體軌跡模型等參數配置,以實現弱信號、高動態、多徑干擾或者特定測試環境的呈現。
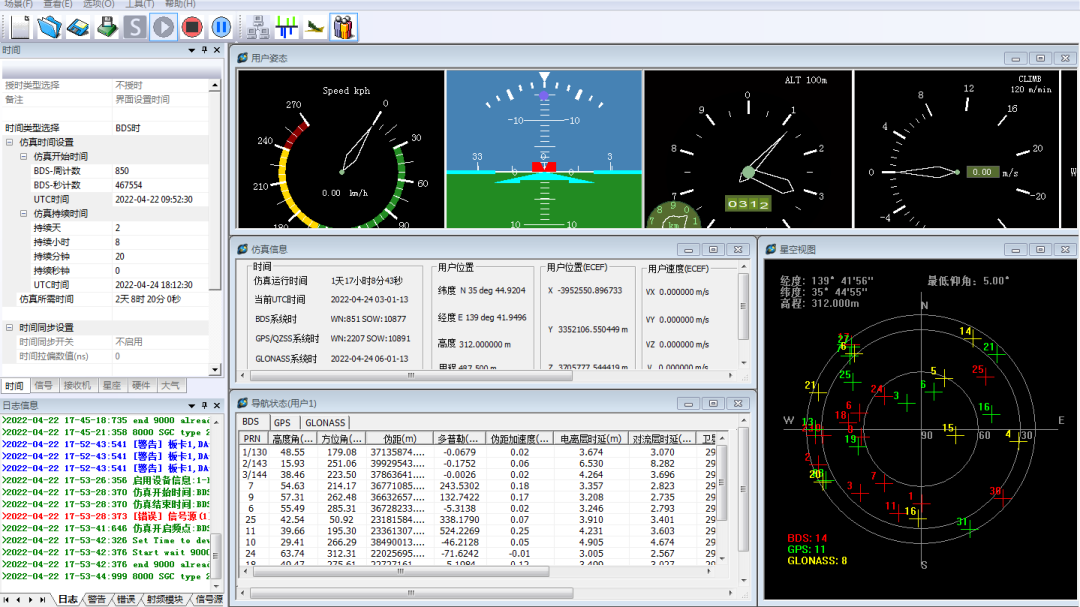
圖6 衛星信號模擬器控制與顯示終端
RTK算法驗證系統功能介紹
中汽數據RTK高精度定位算法驗證系統通過將場景仿真軟件、數據處理插件等軟件與GNSS衛星信號模擬器、算法運行模塊等硬件相結合,同時借助配套的控制與顯示終端,對BDS、GPS等多制式系統全頻點衛星導航信號及RTK基準站觀測值數據進行模擬,實現對高精定位算法的驗證與評價。
該驗證系統可用于RTK高精度定位算法驗證、GNSS HIL驗證等應用與研究,可在實驗室的環境下對相關軟硬件進行測試與驗證。此方法通過仿真驗證手段可大幅降低開發成本,在加快產品開發速度的同時,也能夠保證產品的質量。
中汽數據具有完整的RTK高精定位算法驗證系統、OTA功能驗證、TBOX功能驗證、V2X數據采集、V2X仿真驗證等設備及解決方案,目前已與行業內多家企業展開相關合作與研究,共同推進相關技術和產品的落地與應用,促進智能網聯汽車和智慧交通體系的新模式和新形態發展。
審核編輯:湯梓紅
-
高精度
+關注
關注
1文章
520瀏覽量
25428 -
定位算法
+關注
關注
0文章
61瀏覽量
14988 -
GNSS
+關注
關注
9文章
758瀏覽量
47834 -
RTK
+關注
關注
8文章
127瀏覽量
37469
原文標題:淺析RTK高精度定位算法驗證系統
文章出處:【微信號:雨飛工作室,微信公眾號:雨飛工作室】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
支持RTK的兩款高精度定位模塊
什么是RTK?支持RTK的高精度定位模塊有哪些?
一文讀懂RTK技術及支持RTK高精度定位模塊應用方向
OPPO推出自研的TK 高精度定位算法 實現精度小于 1 米
OPPO推出自研RTK高精度定位算法,實現精度小于1米
北斗RTK高精度定位技術原理及優勢
內置RTK算法的GNSS全頻點高精度定位模塊介紹


北斗RTK高精度定位技術原理及優勢
室外定位:高精度北斗RTK定位技術
北斗RTK高精度定位技術原理、技術優勢及應用領域






 工商網監
工商網監
評論