 對基于SVM改進型的異步電機直接轉矩控制算法進行梳理
對基于SVM改進型的異步電機直接轉矩控制算法進行梳理
導讀:本期對基于SVM改進型的異步電機直接轉矩控制算法進行梳理,有兩電平SVM和三電平SVM。
一、傳統直接轉矩控制存在問題的分析
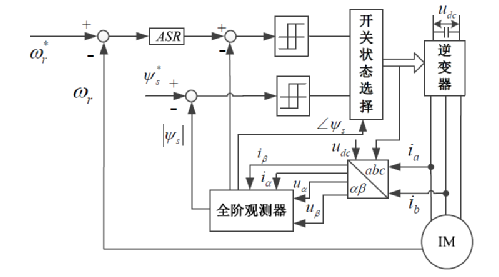
直接轉矩控制在兩相靜止坐標系下分析異步電動機的數學模型,控制電動機的磁鏈和轉矩,它所需要的信號處理工作特別簡單,所用的控制信號使觀察者對于異步電動機的物理過程能夠做出直接和明確的判斷;控制磁場定向所用到的是定子磁鏈,只要知道定子電阻就可以觀測出來,大大減少了矢量控制技術中控制性能易受電動機參數變化影響的問題;
采用空間矢量的概念來分析異步電動機的數學模型和控制其各物理量, 使問題變得特別簡單明了; 強調轉矩的直接控制效果,從控制轉矩的角度出發,采用離散的電壓空間矢量和六變形磁鏈軌跡或近似圓形磁鏈軌跡的概念;對轉矩直接控制,其控制方式是:通過轉矩兩點式調節器把轉矩檢測值與轉矩給定值做滯環的比較,把轉矩波動限制在一定的容差范圍內,因此它的控制效果不取決于異步電動機的數學模型是否能夠簡化,而是取決于轉矩的實際狀況。
綜上所述,直接轉矩控制采用空間矢量的分析方法,在兩相靜止坐標系下計算與控制異步電動機的轉矩和磁鏈, 采用定子磁場定向,借助于離散的兩點式調節產生PWM信號,直接對逆變器的開關狀態進行最佳控制,以獲得轉矩的高動態性能。
它省掉了復雜的矢量變換與異步電動機動態數學模型的簡化處理,沒有通常的PWM信號發生器。它的控制思想新穎,控制結構簡單,控制手段直接,信號處理的物理概念明確,控制系統的轉矩相應迅速, 是一 種具有高靜、動態性能的交流調速方法。
盡管直接轉矩控制具有上述一些優點, 但是直接轉矩控制的兩個最主要 的缺點卻大大限制了其在交流調速中的廣泛應用。 電磁轉矩脈動過大和逆變 器開關頻率不恒定是直接轉矩控制的兩個最主要的缺點。
1.1電磁轉矩脈動過大 電磁轉矩脈動過大產生的原因如下:
(l)、 在異步電動機直接轉矩控制系統中,根據電壓開關矢量表,在逆變器的整個開關周期內, 只有一個電壓空間矢量作用于異步電動機。由于所選擇的電壓空間矢量一直作用于異步電動機,定子電流、電磁轉矩等物理量始終沿著一個方向變化。
在轉矩差較大的情況下,所選擇的電壓空間矢量使轉矩在一個開關周期的較長時間內才可能達到參考值;但是在轉矩差較小的情況下, 所選擇的電壓空間矢量使轉矩在一個開關周期的較短時間內就可以達到參考值, 而余下的時間因未發生逆變器開關狀態的變化,所選擇的電壓空間矢量繼續作用于異步電動機,故轉矩繼續沿原來的趨勢變化,從而產生較大的電磁轉矩脈動。
(2)、由于受到電力電子開關器件所能承受的開關頻率的限制,在電機運行在高速狀態時,轉矩滯環控制器所設定的滯環帶寬不能太小,如果太小將會產生很大的逆變器開關損耗。這樣, 當電機運行在低速狀態時,滯環帶寬相對變大,也造成了較大的轉矩脈動。
1.2逆變器開關頻率不恒定
逆變器的開關時刻是山轉矩滯環控制器的上下邊界決定的,在直接轉矩控制中,轉矩上升和下降的斜率與很多因素有關,不是一個常值。例如,定子磁鏈所在的扇區不同,即便選擇相同的電壓空間矢量,而轉矩變化的斜率也是不同的。因此逆變器的開關頻率是不固定的。
二、基于SVM改進的異步電機直接轉矩控制
DTC 存在轉矩紋波大,開關頻率不固定等缺點。不少學者對這一問題進行了分析并提出了相應的解決辦法。其中應用較為廣泛的方法是將 SVM 引入 DTC。由于 SVM 能在調制范圍內綜合出任意幅值和相位的參考電壓,因而相比只有有限個電壓矢量的開關表具有更精細的調節能力。
采用 SVM 后采樣頻率無需太高即可獲得較為優異的控制性能而且原DTC開關頻率變化的問題亦隨之解決。對于這類方法來說,問題的關鍵在于如何獲得參考電壓。可能的方法有無差拍控制,滑模控制器,定子磁場定向等。雖然引入 SVM 后能提升 DTC 的穩態性能,但是大多數情況下系統變得更為復雜而且對參數依賴性更強。
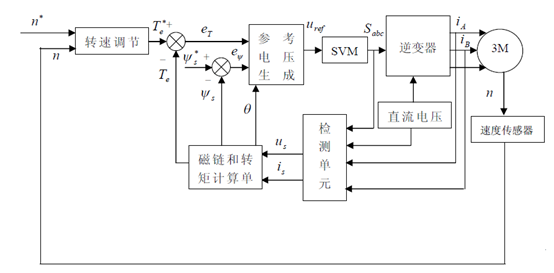
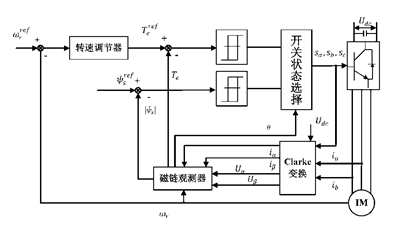
圖2 基于SVM改進的異步電機直接轉矩控制系統框圖
在改進后的控制系統中,將滯環比較器替換為控制性能更為卓越的PI 控制器,SVPWM 模塊可以根據磁鏈和轉矩偏差的大小和方向,實時精確的調制出任意的改變磁鏈和轉矩所需的電壓空間矢量,實現磁鏈的平滑調節,而不受開關表中空間電壓矢量數量的限制。該方案能使逆變器開關頻率恒定,從而可以大大降低轉矩、磁鏈的脈動。
該系統采用的是一種先進的脈寬調制策略,將逆變器和異步電機看做一個整體來控制,控制系統具有直流電壓利用率高、算法簡單、諧波損耗及噪聲低等特點,將先進的控制理應用到直接轉矩控制系統中,大大提高了系統的性能。
2.1 SVPWM
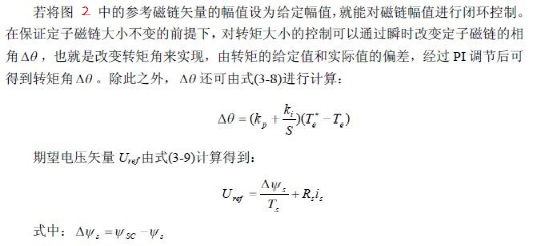
(1) 期望電壓ref U 的生成
下一個周期所需期望電壓矢量的生成需要讓定子磁鏈和電磁轉矩在上一個周期內都能跟蹤期望值,從而利用其與期望值的偏差控制下一個周期內定子磁鏈和電磁轉矩的大小。
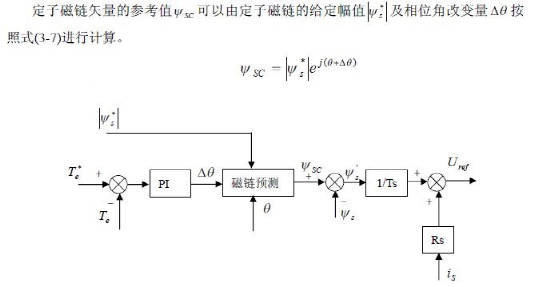
圖3 期望電壓矢量的生成
(2) 兩電平SVM/三電平SVM
兩電平SVM/三電平SVM的輸入都是參考電壓,輸出的是參考電壓對應的逆變器的6個脈沖。兩電平SVM和三電平SVM在之前的文章有過介紹,本期直接把兩電平/三電平SVM模塊移植過來進行使用。
(3) 仿真模型搭建(采樣率10K)
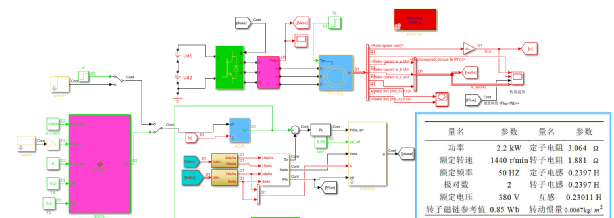
圖4 基于SVM改進的異步電機直接轉矩控制系統仿真
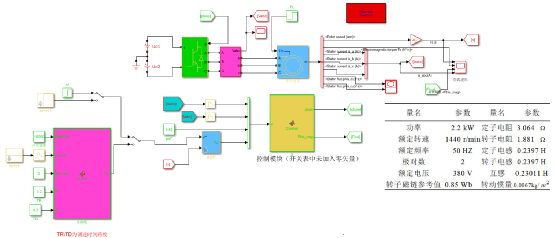
圖5傳統異步電機直接轉矩控制系統仿真
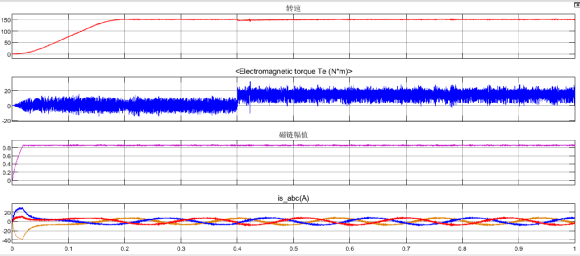
圖6傳統異步電機直接轉矩控制系統仿真波形變化情況
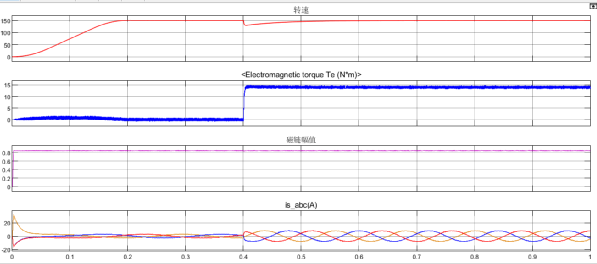
圖7 基于SVM改進的異步電機直接轉矩控制系統仿真波形變化情況
從圖6和圖7對比發現,基于SVM改進的異步電機直接轉矩控制的轉矩脈動明顯減小,且定子磁鏈的容差也減小很多。
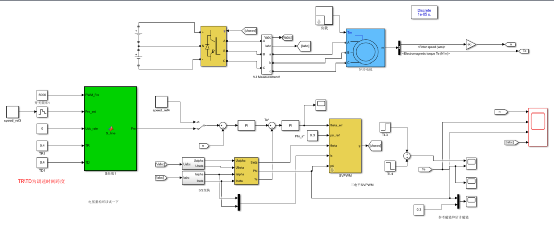
圖8 基于三電平SVM改進的異步電機直接轉矩控制系統仿真
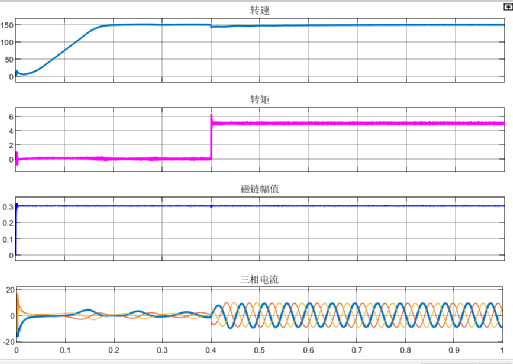
圖9 基于三電平SVM改進的異步電機直接轉矩控制系統仿真波形變化情況
三、總結
3.1 兩電平DTC仿真結果分析
突加負載后轉矩不能快速響應且轉矩脈動較大,不能精確控制在較小范圍內,即使在穩態時也有周期性的轉矩波動;定子三相電流諧波分量較大,會使電機發熱嚴重,開關損耗大,從而減小了系統的輸出功率,降低控制系統的效率;磁鏈畸變較嚴重,軌跡偏離標準圓,磁鏈跨越扇區分界時還會造成磁鏈跳變,尤其電機啟動時變化幅度大,不能平滑線性遞增,啟動后脈動嚴重;
電機啟動時轉速不能立即響應,升速較慢,且超調較大,達到給定后不能保持為恒定,在0.4秒時突加負載時會使轉速突變,抗擾性較弱。
3.2 三電平DTC仿真結果分析
改進后的控制系統在突加負載后轉矩能快速響應,在啟動時也能快速建立。定子磁鏈幾乎能平滑變化,更加接近標準圓,磁鏈跨越扇區邊界時不再有畸變現象,整體脈動幅度大大降低;電機轉速響應快速準確,接近理想情況,啟動時迅速上升,超調極小,穩定后能保持完全恒定,精度高,特別顯著的是在應對突加負載時有相當強的抗擾性和自適性,而且幾乎不產生速度降落,產生的微小速降變化快速,將很大程度地減小速度變化對負載造成的不良影響。定子三相電流更加接近標準正弦波,諧波分量小,體現了開關頻率的相對穩定,因此開關管損耗和電機發熱問題會得到有效解決,系統效率將應之提高。
審核編輯:劉清
-
異步電機
+關注
關注
6文章
417瀏覽量
32740 -
SVM
+關注
關注
0文章
154瀏覽量
32337 -
控制算法
+關注
關注
4文章
164瀏覽量
21611
原文標題:基于SVM改進型異步電機直接轉矩控制梳理
文章出處:【微信號:淺談電機控制,微信公眾號:淺談電機控制】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

永磁同步電機改進型預測轉矩控制







 工商網監
工商網監
評論