") 影響抖動(dòng)測(cè)試結(jié)果和精度的因素
影響抖動(dòng)測(cè)試結(jié)果和精度的因素
本期我們將就抖動(dòng)和抖動(dòng)測(cè)試做一個(gè)專題介紹,包括如下主題:
01. 抖動(dòng)研究的源起
02. 抖動(dòng)測(cè)試和分析的基本方法和經(jīng)典理論
03. 抖動(dòng)測(cè)試的演進(jìn)和新挑戰(zhàn)
04. 影響抖動(dòng)測(cè)試結(jié)果和精度的因素
1. 抖動(dòng)研究的源起
抖動(dòng)測(cè)試最早在上個(gè)世紀(jì)80年代開(kāi)始萌芽,HP公司電信網(wǎng)絡(luò)測(cè)試部門-蘇格蘭科技公司1982年在蘇格蘭推出了針對(duì)PDH(Plesiochronous Digital Hierarchy,準(zhǔn)同步數(shù)字體系)的第一個(gè)抖動(dòng)測(cè)量?jī)x器,速率高達(dá)E3和DS3,之后在1984年推出首批140 Mb / s抖動(dòng)測(cè)試儀之一。
在90年代推出針對(duì)SONET / SDH抖動(dòng)測(cè)試產(chǎn)品和方案。事實(shí)上在同步數(shù)字傳輸體系(SONET/SDH)和通訊系統(tǒng)中引入抖動(dòng)的概念主要用于評(píng)估數(shù)據(jù)包級(jí)的傳輸延時(shí)偏差。因此大家也可以看到經(jīng)典抖動(dòng)定義也來(lái)自于當(dāng)年的業(yè)界巨擘貝爾實(shí)驗(yàn)室。
進(jìn)入90年代以后,隨著數(shù)字電路系統(tǒng)中的源同步時(shí)鐘總線的發(fā)展,由于外部同步時(shí)鐘頻率漸漸成為瓶頸開(kāi)始轉(zhuǎn)向嵌入式時(shí)鐘的串行差分總線,非常典型的就是PCI總線同步時(shí)鐘頻率最高到133MHz就開(kāi)始轉(zhuǎn)向PCIE1.0 2.5Gbps發(fā)展。由此對(duì)數(shù)字電路系統(tǒng)中的水平時(shí)間參數(shù)的測(cè)量也從傳統(tǒng)的Setup/Hold或Skew測(cè)量轉(zhuǎn)為水平方向Jitter的測(cè)量。
在今天,抖動(dòng)測(cè)試除了是很多高速串行總線和標(biāo)準(zhǔn)的一致性測(cè)試眾多項(xiàng)目中的重要組成部分和內(nèi)容,同時(shí)還是針對(duì)系統(tǒng)級(jí)傳輸性能評(píng)估的重要方法,以及探究系統(tǒng)問(wèn)題根源的重要手段。因此對(duì)抖動(dòng)進(jìn)行深入的探索和研究無(wú)論何時(shí)都具有深刻的意義和價(jià)值。
2. 抖動(dòng)測(cè)試和分析的基本方法和經(jīng)典理論
在90年代,伴隨著數(shù)字電路和系統(tǒng)的串行差分化的同時(shí)以x86處理器為核心的軟硬件系統(tǒng)廣泛應(yīng)用于各行業(yè),當(dāng)然也包括測(cè)試測(cè)量行業(yè),示波器也開(kāi)始全面武裝更強(qiáng)大的x86處理器和windows操作系統(tǒng),隨之而來(lái)的是各種算法程序的全面發(fā)展和推進(jìn),這其中就包括了抖動(dòng)測(cè)量算法和分離的經(jīng)典理論。
下圖顯示的是充斥于各種文獻(xiàn)的抖動(dòng)測(cè)量中三種基本的抖動(dòng)算法:
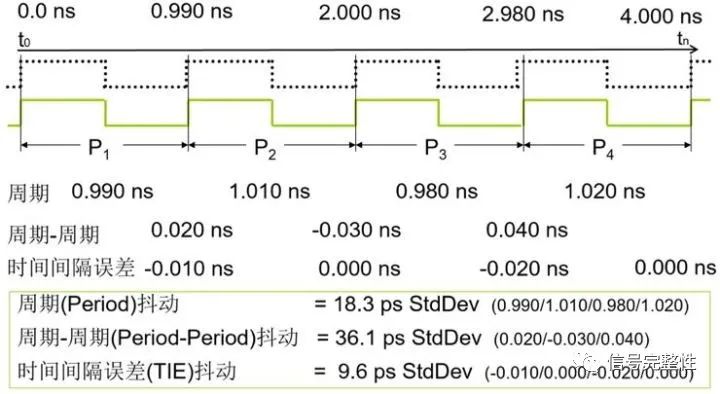
圖1 基本抖動(dòng)算法示意圖
周期抖動(dòng)算法比較簡(jiǎn)單,以信號(hào)本身的每個(gè)周期值為樣本進(jìn)行統(tǒng)計(jì)分析,可以反映所有樣本的平均值及個(gè)體與圓心即平均值偏差的情況,用于一般的時(shí)鐘信號(hào)的評(píng)估。
周期-周期抖動(dòng)以兩個(gè)相鄰周期的周期差值為樣本進(jìn)行統(tǒng)計(jì)分析,很明顯這是對(duì)信號(hào)周期的一階微分運(yùn)算,這一指標(biāo)對(duì)分析鎖相環(huán)的性能時(shí)有很高價(jià)值。由此還衍生出N周期—N周期抖動(dòng),比如針對(duì)DDR總線的時(shí)鐘測(cè)試中就有5/10個(gè)連續(xù)時(shí)鐘周期抖動(dòng)的測(cè)試。
第三個(gè)度量方法,時(shí)間間隔誤差(Time Interval Error,簡(jiǎn)稱TIE)抖動(dòng),有時(shí)也被稱作相位抖動(dòng)(Phase Jitter),以每個(gè)周期點(diǎn)的累計(jì)時(shí)間值相對(duì)當(dāng)前時(shí)間點(diǎn)的理想值偏差為樣本進(jìn)行統(tǒng)計(jì)分析,這個(gè)時(shí)間偏差算法呈現(xiàn)累積效應(yīng),是一個(gè)積分運(yùn)算,可以反映出信號(hào)的長(zhǎng)期抖動(dòng),而這一理想位置則需要通過(guò)軟件時(shí)鐘恢復(fù)(實(shí)時(shí)示波器方法)或者通過(guò)外部輸入/硬件時(shí)鐘恢復(fù)(采樣示波器方法)得到一個(gè)參考時(shí)鐘作為運(yùn)算的基準(zhǔn)。
TIE抖動(dòng)在今天的數(shù)字電路與通信系統(tǒng)中已經(jīng)成為分析數(shù)據(jù)傳輸中的抖動(dòng)指標(biāo)和性能的最為通用的抖動(dòng)度量方法。關(guān)于以上三個(gè)經(jīng)典抖動(dòng)算法定義和描述,推薦閱讀Ref [6]-- PCI ExpressTM Jitter Modeling Revision 1.0RD.
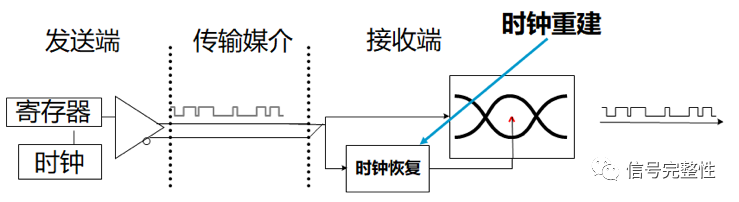
圖2 時(shí)間間隔誤差抖動(dòng)測(cè)量方法示意圖
除了上述三個(gè)度量方法還有常用到的三個(gè)統(tǒng)計(jì)學(xué)參數(shù):
平均值:相對(duì)絕對(duì)值的一個(gè)固定偏移或偏差,通常不重要因?yàn)榭梢孕拚?/p>
RMS抖動(dòng):通常用于表征隨機(jī)抖動(dòng)成分。
Peak-to-Peak抖動(dòng):可用于表征確定性(有界)和隨機(jī)(無(wú)界)抖動(dòng)分量,另外必須在給定的BER下引用或考慮隨機(jī)(無(wú)界)抖動(dòng)。
小測(cè)驗(yàn):
在實(shí)時(shí)示波器進(jìn)入windows時(shí)代前,業(yè)界的老師傅們經(jīng)常用無(wú)限余輝累積觸發(fā)位置后的一個(gè)時(shí)鐘周期邊沿,然后用光標(biāo)測(cè)量邊沿累積后的時(shí)間寬度值,如下圖示,請(qǐng)問(wèn)這是哪種抖動(dòng)?
A.周期抖動(dòng)B.周期-周期抖動(dòng)C.TIE抖動(dòng)

圖3 實(shí)時(shí)示波器上經(jīng)典抖動(dòng)測(cè)量示意圖
思考:
采樣示波器在進(jìn)行分析眼圖時(shí)也會(huì)得到一個(gè)抖動(dòng)測(cè)量值,這又是什么抖動(dòng)呢?
A.周期抖動(dòng)B.周期-周期抖動(dòng)C.TIE抖動(dòng)
必須要說(shuō)明的是,業(yè)界針對(duì)抖動(dòng)的研究和分析其實(shí)最初是從采樣示波器開(kāi)始。因?yàn)樯蟼€(gè)世紀(jì)90年代末采樣示波器相比實(shí)時(shí)示波器可以實(shí)現(xiàn)的帶寬更高(因?yàn)榈刃Р蓸訜o(wú)需高采樣率配套,且無(wú)需考慮普遍信號(hào)測(cè)試需求通常輸入信號(hào)幅度有限因此無(wú)衰減和放大器電路因而帶寬更高),同時(shí)高ADC位數(shù)提供的測(cè)量精度也更高,因此首先被用于高速芯片及一些器件如光模塊等串行數(shù)據(jù)的眼圖分析,并根據(jù)眼圖結(jié)果衍生出抖動(dòng)分析和測(cè)量。
基于眼圖堆疊和測(cè)量結(jié)果,為了評(píng)估數(shù)字串行總線傳輸?shù)目傮w性能因此引入抖動(dòng)的分析和評(píng)估理論。采用的重要評(píng)價(jià)指標(biāo)是特定誤碼率(通常是10E-12)水平下的總抖動(dòng)Tj @ BER,因?yàn)?Eye Open= 1UI – Tj @BER。
那么如何得到總體抖動(dòng)這一結(jié)果呢?
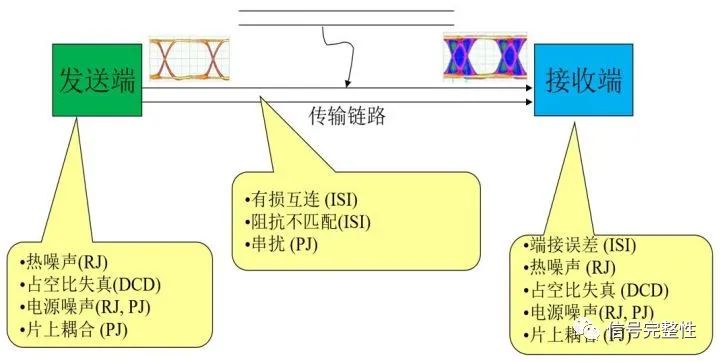
圖4 典型的串行傳輸鏈路中的抖動(dòng)根源
一種方法是根據(jù)上圖中抖動(dòng)根源按圖索驥分別測(cè)量得到Rj和各種Dj成分然后卷積得到給定誤碼水平下的抖動(dòng)概率密度函數(shù)然后推算出Tj。顯然這一方法的可操作性不高尤其是早年基于采樣示波器疊加的眼圖結(jié)果進(jìn)行抖動(dòng)分析的狀況。
另一種方法就是雙狄拉克模型法(Dual-Dirac Model),通過(guò)測(cè)量和計(jì)算Rj(δ)與Dj(δδ)再根據(jù)如下公式:
Tj@BER = n x Rj +Dj
計(jì)算得到Tj@BER。通常10E-12誤碼水平時(shí)n=14 (因篇幅限制,本文不就n與BER關(guān)系做過(guò)多描述,參考Ref[1])。
雙狄拉克模型法有5個(gè)假設(shè)前提:
1.總體抖動(dòng)可以分解為Rj和Dj
2.RJ遵循高斯分布,可以用單個(gè)相關(guān)參數(shù)的術(shù)語(yǔ)進(jìn)行完整描述,RJ的rms值分布,或等效地,高斯分布的標(biāo)準(zhǔn)偏差σ
3.Dj遵循有限和有邊界的分布
4.DJ遵循由兩個(gè)Dirac-delta函數(shù)形成的分布。兩個(gè)delta函數(shù)的時(shí)間延遲分離給出了雙狄拉克模型相關(guān)DJ,如下圖所示
5.抖動(dòng)是一種靜止現(xiàn)象或者可重復(fù)觀測(cè)。也就是說(shuō),測(cè)量了在適當(dāng)?shù)臅r(shí)間間隔內(nèi)對(duì)給定系統(tǒng)的抖動(dòng)后無(wú)論何時(shí)再啟動(dòng)該時(shí)間間隔范圍的測(cè)量,都會(huì)給出相同的結(jié)果
雙狄拉克模型法基于眼圖左右交叉點(diǎn)的抖動(dòng)直方圖,提供了最簡(jiǎn)單的概率密度函數(shù):交叉點(diǎn)分為兩個(gè)Dirac-delta函數(shù),位于μL和μR(DJ主導(dǎo)區(qū)域),然后采用人為擬合快速過(guò)渡到RJ主導(dǎo)的尾部。有許多方法可以實(shí)現(xiàn)雙狄拉克模型,在所有這些模型中,估計(jì)總體抖動(dòng)的主要問(wèn)題是如何描述抖動(dòng)分布尾部的問(wèn)題,兩個(gè)標(biāo)準(zhǔn)偏差為σ的高斯分布的尾部由固定量DJ(δδ)= |μL - μR|分隔。
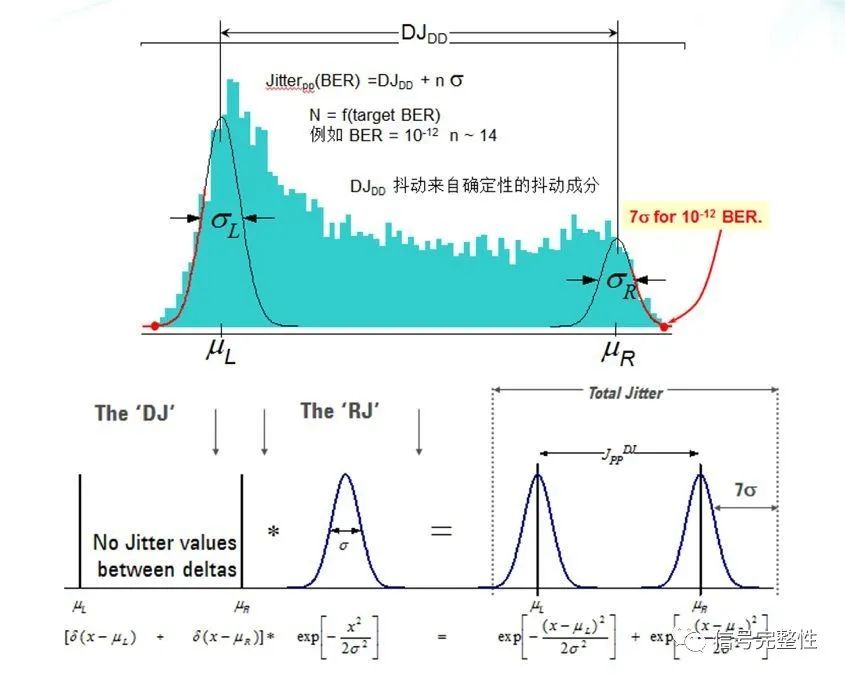
圖5 雙狄拉克模型分解RJ和DJ示意圖
有的時(shí)候還會(huì)經(jīng)常看到另一個(gè)測(cè)量結(jié)果DJ(p-p),這個(gè)如何理解?
真實(shí)的DJ從不遵循簡(jiǎn)單的雙狄拉克分布,因此期望從雙狄拉克模型中提取的DJ接近實(shí)際的峰峰值DJ是不合理的。DJ(δδ)是模型相關(guān)量,必須在假設(shè)DJ遵循由兩個(gè)Dirac-delta函數(shù)形成的分布的情況下導(dǎo)出,如圖5所示。
相比DJ(δδ)總是可以測(cè)量得到,而DJ(p-p)只能在特定情況下可測(cè)。比如當(dāng)DJ僅由數(shù)據(jù)相關(guān)抖動(dòng)(DDJ)組成時(shí),可以通過(guò)比較重復(fù)數(shù)據(jù)碼型的平均跳變次數(shù)來(lái)測(cè)量。通常DJ(δδ)小于DJ(p-p)。因此總結(jié),DJ(δδ)定義明確且可測(cè),而DJ(p-p)僅能在特定情況下測(cè)量得到,而且對(duì)估計(jì)總體抖動(dòng)沒(méi)有作用。
順便提一下,雖然DJ(p-p)無(wú)法測(cè)量且意義不大,但是DJ的子成分如DDJ(p-p)和ISI(p-p)卻是有界且可測(cè),在實(shí)時(shí)抖動(dòng)分析結(jié)果里經(jīng)常可以看到。
針對(duì)一個(gè)典型的包含發(fā)送端,傳輸鏈路以及接收端以及CLK的典型系統(tǒng)架構(gòu),比如PCIExpress:
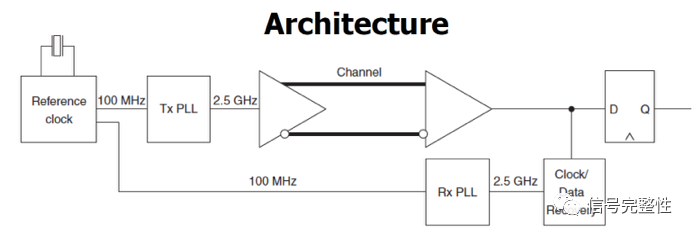
圖6 典型的PCIExpress架構(gòu)
通過(guò)分別測(cè)量和分析得到系統(tǒng)各單元的Rj標(biāo)準(zhǔn)偏差和Dj(δδ)后可以得到整個(gè)系統(tǒng)的抖動(dòng)參數(shù):

之后就可以得到整個(gè)系統(tǒng)在特定誤碼率下的總體抖動(dòng)。關(guān)于雙狄拉克模型的相關(guān)原理及知識(shí),請(qǐng)參考Ref [1].
由于采樣示波器在早期只是純粹進(jìn)行眼圖疊加進(jìn)而進(jìn)行總體抖動(dòng)估算而很難對(duì)具體的成因進(jìn)行分析,因此無(wú)法滿足很多的應(yīng)用需求(直到2006年左右在采樣示波器上開(kāi)發(fā)出碼型同步觸發(fā)技術(shù)從而可以穩(wěn)定捕獲特定碼型比如不長(zhǎng)于2?16的PRBS碼型,才引入了抖動(dòng)分解技術(shù))。
隨著實(shí)時(shí)示波器在平臺(tái)和性能上的大幅提升,在實(shí)時(shí)示波器上進(jìn)行抖動(dòng)分析越來(lái)越普遍并漸漸成為主流。實(shí)時(shí)示波器無(wú)需外部觸發(fā)或同步時(shí)鐘信號(hào),同時(shí)相比采樣示波器具有長(zhǎng)內(nèi)存可以一次觸發(fā)采集一定時(shí)長(zhǎng)的波形用于抖動(dòng)分析進(jìn)而做出對(duì)實(shí)際工作有指導(dǎo)性的抖動(dòng)分解結(jié)果。
那么首先實(shí)時(shí)示波器如何進(jìn)行抖動(dòng)分析呢?
如下圖示,實(shí)時(shí)示波器首先捕獲一定時(shí)長(zhǎng)的波形,然后基于特定標(biāo)準(zhǔn)的數(shù)據(jù)的時(shí)鐘恢復(fù)算法通常為一階或二階鎖相環(huán),帶寬因標(biāo)準(zhǔn)差異而不同,針對(duì)CLK通常采用Constant CLK即首先計(jì)算周期的平均值得到基準(zhǔn),分析得到信號(hào)的TIE抖動(dòng)。
基于此TIE抖動(dòng)結(jié)果,抖動(dòng)分析軟件會(huì)分析得到抖動(dòng)趨勢(shì)圖(Trend),這一趨勢(shì)圖提供了每個(gè)時(shí)間點(diǎn)的數(shù)據(jù)邊沿位置相對(duì)于理想位置時(shí)間差即TIE的趨勢(shì)圖。如果是數(shù)據(jù)相關(guān)抖動(dòng)DDJ如ISI則會(huì)顯示出與數(shù)據(jù)碼型的強(qiáng)相關(guān)性,如果是周期性抖動(dòng)Pj成分則會(huì)顯示出與其它特定頻率信號(hào)的相關(guān)性。
分析抖動(dòng)的另一種方法是采用頻域角度,針對(duì)TIE抖動(dòng)趨勢(shì)圖做FFT數(shù)學(xué)函數(shù),基于重復(fù)頻率成分的抖動(dòng)視圖角度。在這種情況下,數(shù)據(jù)結(jié)果被處理繪制為垂直軸上的定時(shí)誤差值與水平軸上的頻率。這個(gè)角度在尋找與數(shù)據(jù)本身特征不相關(guān)的周期抖動(dòng)Pj時(shí),會(huì)特別有用。
實(shí)時(shí)抖動(dòng)分析軟件還提供了“直方圖”視圖,將抖動(dòng)分析結(jié)果顯示為概率分布的函數(shù)(PDF)(數(shù)據(jù)記錄中所有TIE測(cè)量結(jié)果合成),表現(xiàn)為定時(shí)誤差與命中數(shù)(N)的二維顯示。實(shí)時(shí)直方圖的結(jié)果應(yīng)該與從眼圖產(chǎn)生的重復(fù)直方圖的測(cè)量結(jié)果密切相關(guān)。但是,通過(guò)實(shí)時(shí)采樣的長(zhǎng)存儲(chǔ)深度,可以從單次采集信號(hào)中獲得更多數(shù)據(jù)。此外,基于實(shí)時(shí)示波器的重復(fù)多次采樣,可以產(chǎn)生更準(zhǔn)確和完整的PDF。
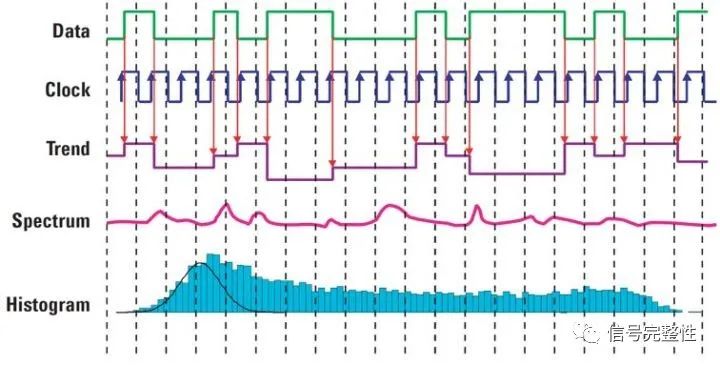
圖7 EZJIT軟件實(shí)時(shí)抖動(dòng)分析的處理方法
Keysight實(shí)時(shí)示波器抖動(dòng)分析軟件EZJIT提供的功能就到這里。
然后,實(shí)時(shí)抖動(dòng)分析軟件是如何進(jìn)行一步步的抖動(dòng)成分分解的? 抖動(dòng)分解是EZJIT PLUS的功能。如Ref[2] [3]文獻(xiàn)描述,根據(jù)經(jīng)典抖動(dòng)成因分解模型:
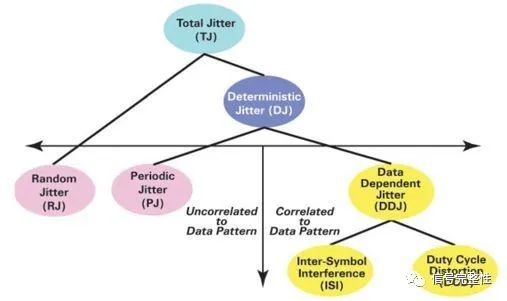
圖8 經(jīng)典抖動(dòng)成因分解模型
首先第一步,根據(jù)數(shù)據(jù)碼型特點(diǎn)(在EZJIT Plus軟件里可以選擇Periodic Data 或Arbitrary Data)將DDJ(數(shù)據(jù)相關(guān)抖動(dòng),主要是ISI即碼間干擾)和RJ和PJ(與數(shù)據(jù)無(wú)關(guān)抖動(dòng)成分)分離開(kāi)來(lái);根據(jù)DCD和ISI的不同表現(xiàn)再進(jìn)行分離。
有時(shí)甚至可以采用發(fā)送特定如101010…碼型以準(zhǔn)確測(cè)量DCD抖動(dòng)。在Arbitrary Data模式下EZJIT PLUS軟件使用線性回歸技術(shù)從TJ中提取DDJ。這種線性回歸類似回聲消除或其他自適應(yīng)濾波應(yīng)用。這一線性回歸技術(shù)要求設(shè)定一組系數(shù)來(lái)描述數(shù)據(jù)相關(guān)抖動(dòng)的如何從傳輸?shù)臄?shù)據(jù)碼型計(jì)算,EZJIT PLUS軟件里指這套系數(shù)為ISI Filter。(關(guān)于如何設(shè)定ISI Filter請(qǐng)參考Ref [5])
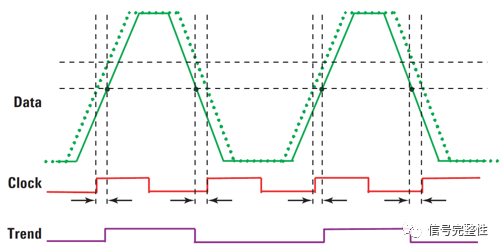
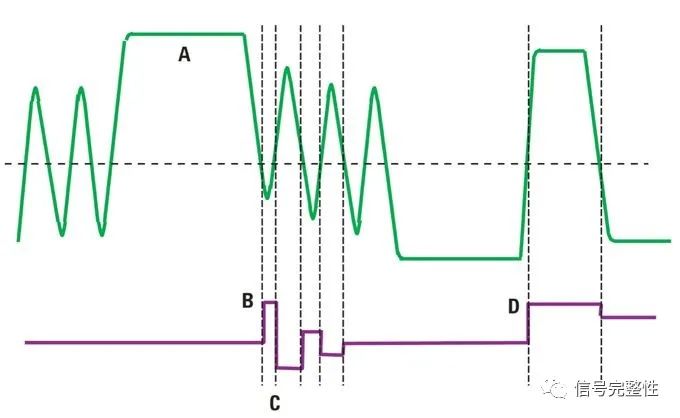
圖9 典型DCD(左)和ISI(右)
第二步,基于第一步已經(jīng)去除了DDJ成分的頻譜圖將PJ和RJ分離。對(duì)功率譜密度積分推導(dǎo)出RJrms,PJ成分求和可以得到PJrms。針對(duì)RJ的特性在EZJIT Plus軟件里可以設(shè)定RJ的帶寬,如白噪聲為寬帶寬,粉紅噪聲為窄帶寬。(相關(guān)說(shuō)明請(qǐng)參考Ref[3])
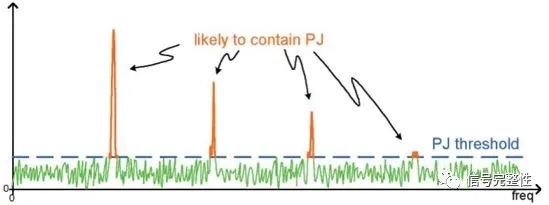
圖10 分離了DDJ后高于設(shè)定閾值的被當(dāng)作PJ,去除后就可以根據(jù)剩余的頻譜分量計(jì)算RJrms
第三步,根據(jù)TIE的直方圖視圖結(jié)果基于前面描述的雙狄拉克模型法擬合出DJ(δ-δ)。結(jié)合前面的頻譜法擬合出的RJrms,就可以確定要求的誤碼率水平下的總體抖動(dòng)即TJ@BER,基于此可以繪出浴盆曲線(Bath Tub)等圖表。
到這里EZJIT PLUS就完成了實(shí)時(shí)示波器的抖動(dòng)分析和分解的全部過(guò)程,最終輸出包括分解完畢的各個(gè)抖動(dòng)分量值,總體抖動(dòng)@給定BER水平,浴盆曲線等。這也是我們進(jìn)行抖動(dòng)分析和分解最終需要得到的結(jié)果。
為了獲得準(zhǔn)確的分析和測(cè)量結(jié)果在進(jìn)行實(shí)時(shí)抖動(dòng)軟件分析時(shí)必須進(jìn)行正確的設(shè)置,包括恰當(dāng)?shù)男盘?hào)垂直刻度,足夠的波形數(shù)據(jù)也就是捕獲時(shí)長(zhǎng),以及足夠的采樣率設(shè)置等等因素,另外針對(duì)前面提到的包括數(shù)據(jù)周期重復(fù)模式還是任意碼型,RJ帶寬及噪聲設(shè)置,以及如何設(shè)置ISI濾波器尺寸等詳細(xì)請(qǐng)參考文末所列參考文獻(xiàn)2,3,4,5等。
另外要強(qiáng)調(diào)的是足夠的波形數(shù)據(jù)和捕獲時(shí)長(zhǎng)除了可以捕獲更多的時(shí)鐘周期或數(shù)據(jù)UI進(jìn)行更準(zhǔn)確的抖動(dòng)分析外也意味著可以捕獲更低頻的抖動(dòng)因?yàn)椴东@的整個(gè)波形周期更長(zhǎng),這也是示波器長(zhǎng)存儲(chǔ)的重要價(jià)值之一。
3 抖動(dòng)測(cè)試的演進(jìn)和新挑戰(zhàn)
早年的經(jīng)典抖動(dòng)定義和分析分解方法在21世紀(jì)初基本已經(jīng)確立,是通用串行電路分析的重要方法之一。但是隨著數(shù)據(jù)速率的持續(xù)推高和電路復(fù)雜程度的加深比如鏈路寬度以及對(duì)均衡算法的應(yīng)用等因素,特定標(biāo)準(zhǔn)的抖動(dòng)定義和算法也在不斷演進(jìn)。
典型如PCIExpress3.0/4.0針對(duì)TX抖動(dòng)測(cè)試重新進(jìn)行了規(guī)劃,定義TP1測(cè)試點(diǎn)(發(fā)送端芯片封裝管腳處)抖動(dòng)分為數(shù)據(jù)相關(guān)抖動(dòng)和數(shù)據(jù)不相關(guān)成分。數(shù)據(jù)相關(guān)抖動(dòng)成分主要源于封裝損耗和反射等信號(hào)完整性效應(yīng)。而數(shù)據(jù)不相關(guān)成分則源于PLL抖動(dòng),電源噪聲和多鏈路之間串?dāng)_等。
PCIE4.0 Base規(guī)范里明確說(shuō)明了之所以做如此分離的原因,因?yàn)檫@種分離與Tx和Rx均衡能力很好地匹配,Tx或Rx均衡不會(huì)減輕不相關(guān)的抖動(dòng)成分,也無(wú)法通過(guò)均衡恢復(fù)水平時(shí)間窗口裕量即降低抖動(dòng)或得到更加張開(kāi)的水平眼圖。重要的是,通過(guò)均衡可恢復(fù)的裕量(數(shù)據(jù)相關(guān)成分)不作為不可恢復(fù)的抖動(dòng)計(jì)入預(yù)算。
從Tx測(cè)量中去除了數(shù)據(jù)相關(guān)的抖動(dòng),就可以分析剩余的抖動(dòng)成分,計(jì)算剩余抖動(dòng)成分的UTj和確定性抖動(dòng)(雙狄拉克模型)UDJDD分量。高頻抖動(dòng)(在通道中受到抖動(dòng)放大)由分離的TTX-UPW-DJDD和TTX-UPW-TJ參數(shù)來(lái)解決。
圖11 PCIE4.0 Base規(guī)范里描述的DDJ測(cè)量和定義
并引入了全新的PWJ,Pulse Width Jitter:
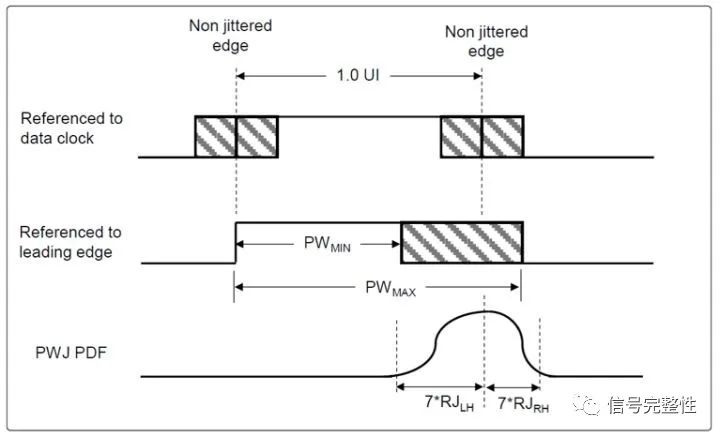
圖 12 PCIE3.0/4.0引入PWJ
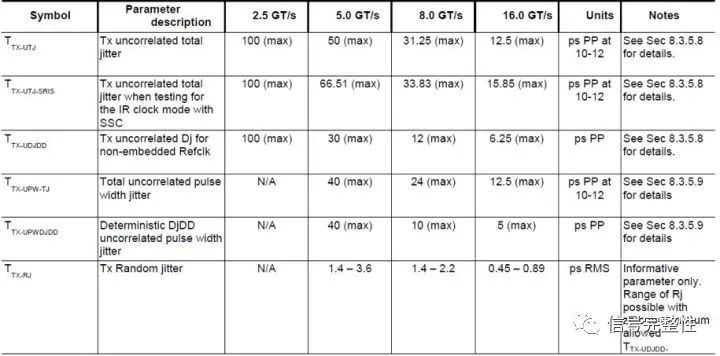
圖13 PCIE4.0 Base規(guī)范定義的抖動(dòng)測(cè)量項(xiàng)目
在PCIE4.0 Base規(guī)范中,最終定義了如上表的分析項(xiàng)目。可以看到,除了針對(duì)性的就DDJ專門做了定義并分離,針對(duì)Uncorrelated Jitter依然采用了前面描述的經(jīng)典抖動(dòng)分析和分解理論進(jìn)行分析。關(guān)于最新的PCIE4.0標(biāo)準(zhǔn)中,針對(duì)抖動(dòng)測(cè)量和分析的定義請(qǐng)參考PCIE4.0 Base規(guī)范,Ref [6]。
傳統(tǒng)的抖動(dòng)測(cè)試軟件EZJIT作為通用抖動(dòng)分析軟件,沒(méi)有按照PCI Express的新定義進(jìn)行抖動(dòng)分析和處理,因此如果需要進(jìn)行完全符合PCI Express標(biāo)準(zhǔn)和規(guī)范的抖動(dòng)分析就需要借助于實(shí)時(shí)示波器上的一致性測(cè)試軟件如D9040PCIC測(cè)試軟件,針對(duì)PCIE4.0 Base測(cè)試點(diǎn)有非常全面的抖動(dòng)測(cè)試項(xiàng)目如下圖示:
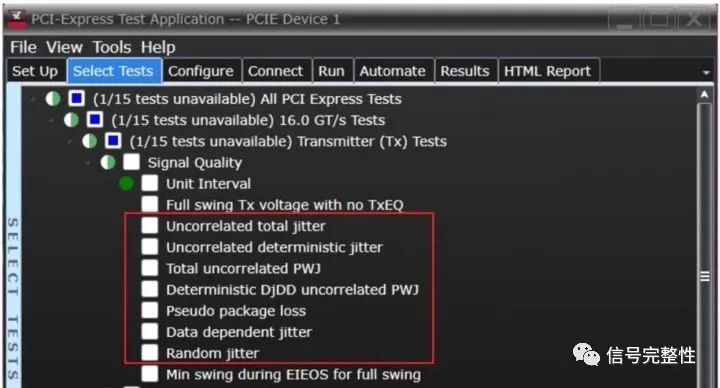
圖14 Keysight D9040PCIC一致性測(cè)試軟件測(cè)試項(xiàng)目
除了PCIE標(biāo)準(zhǔn)外,其它一些標(biāo)準(zhǔn)在抖動(dòng)定義和測(cè)量分析方面也有很多發(fā)展和演進(jìn),比如USB3.x標(biāo)準(zhǔn)作為典型的接口一致性測(cè)試規(guī)定不同的測(cè)試碼型,奈奎斯特碼型CP1或者CP10用于RJ,PRBS碼型CP0或CP9用于Tj測(cè)試,當(dāng)然也需要一致性測(cè)試軟件進(jìn)行測(cè)試,具體不做更多舉例。
另外針對(duì)多鏈路傳輸如IEEE 802.3系列標(biāo)準(zhǔn)在實(shí)現(xiàn)200G/400G時(shí),相對(duì)早期單鏈路串行總線的抖動(dòng)定義和測(cè)量分析,必須考慮跨鏈路的數(shù)據(jù)串?dāng)_引起的抖動(dòng),如下圖所示:
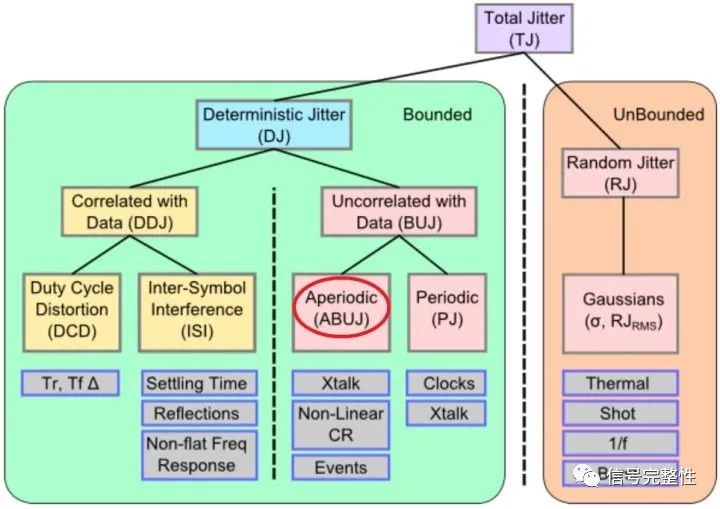
圖15 更全面的抖動(dòng)成分分解模型
這種串?dāng)_或者地彈等引起的抖動(dòng),呈現(xiàn)為非周期,有界和與數(shù)據(jù)無(wú)關(guān)的特性,因此命名為ABUJ(Aperiodic Bunded Uncorrelated Jitter )。
針對(duì)這一新的抖動(dòng)成因,繼續(xù)采用EZJIT Plus軟件的頻譜法分析時(shí),會(huì)存在將這一由串?dāng)_引起的ABUJ歸入RJ的風(fēng)險(xiǎn),從而得到過(guò)大的RJ結(jié)果,最終導(dǎo)致過(guò)大的TJ結(jié)果,帶來(lái)測(cè)量誤差。
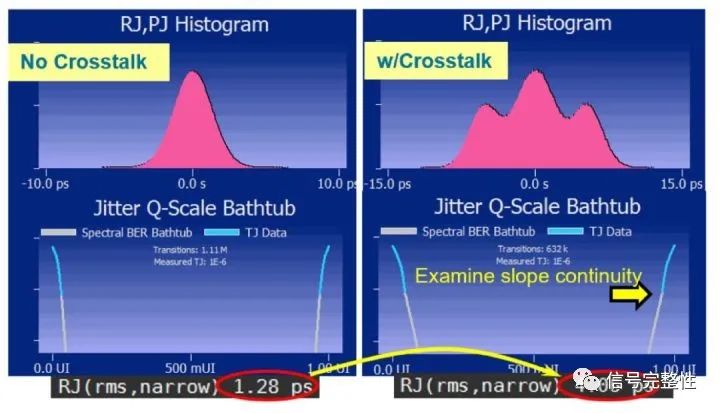
圖16 數(shù)據(jù)中存在XTALK引起ABUJ抖動(dòng)時(shí)頻譜法分析RJ產(chǎn)生誤差
如何解決這一新的問(wèn)題和挑戰(zhàn)呢?
在EZJIT Plus軟件里增加了Tail Fit方法進(jìn)行RJ提取,如下圖所示:

圖17 EZJIT PLUS軟件里增加Tail Fit法提取RJ
這一方法指的就是在實(shí)時(shí)示波器的抖動(dòng)分析軟件里采用雙狄拉克模型法進(jìn)行RJ提取:
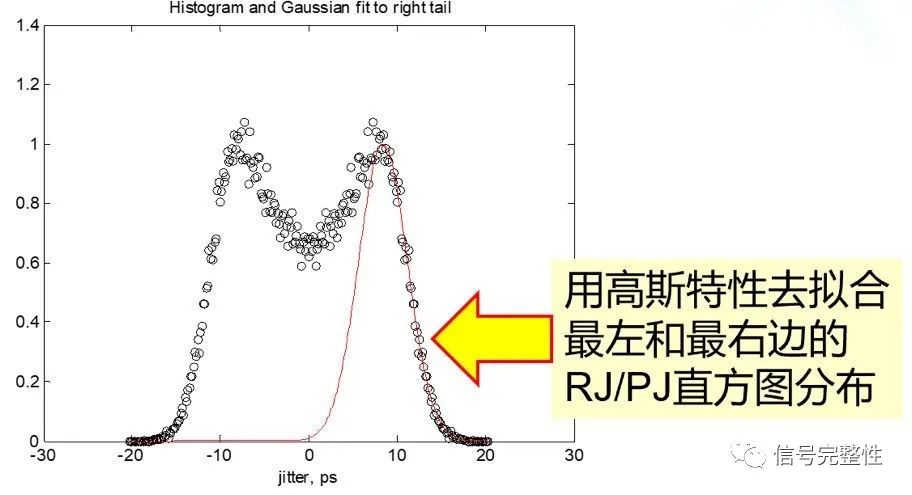
圖18 Tail Fit法RJ擬合示意圖
在以往未使用高斯擬合的原因是由于總直方圖中的點(diǎn)稀缺,曲線擬合的點(diǎn)數(shù)仍然很少,它會(huì)給你帶來(lái)不穩(wěn)定的結(jié)果。下圖顯示了針對(duì)一個(gè)數(shù)據(jù)信號(hào)存在和不存在串?dāng)_情況下分別采用頻譜法和高斯尾部擬合法對(duì)比的結(jié)果。
左邊顯示的是無(wú)串?dāng)_情況下分別采用頻譜法和高斯法結(jié)果相近,右邊顯示在有串?dāng)_情況下,頻譜方法得到的RJ明顯偏大,采用高斯法后得到的RJ結(jié)果就顯然回歸正常。
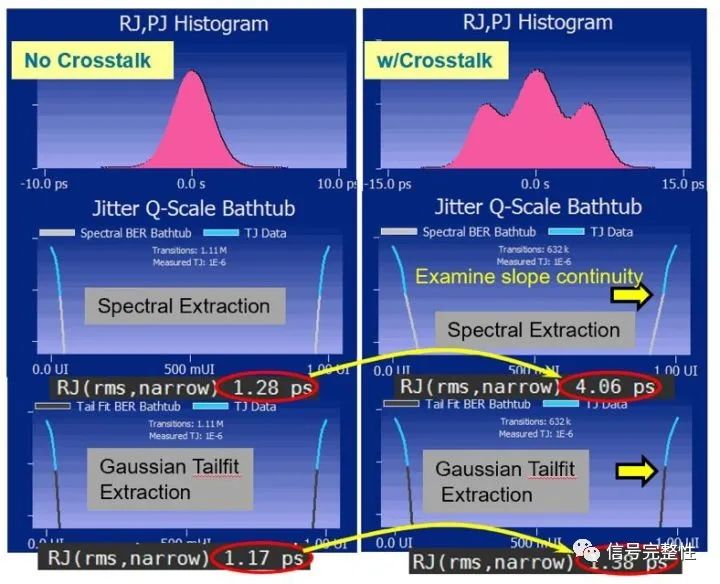
圖19 高斯法和Tail Fit兩種方法分別對(duì)存在和不存在串?dāng)_引起的ABUJ分離差異對(duì)比
除了采用高斯尾部擬合法外,為了獲得更高精度的測(cè)量,還可以先關(guān)閉相鄰?fù)ǖ赖拇當(dāng)_源,進(jìn)行一次抖動(dòng)測(cè)量并記錄RJrms結(jié)果,打開(kāi)串?dāng)_源,在下圖中指定RJrms,然后再進(jìn)行抖動(dòng)測(cè)量,ABUJ就被歸入有界抖動(dòng),不會(huì)被歸入RJ成分并可準(zhǔn)確得到,而TJ也可準(zhǔn)確得到。
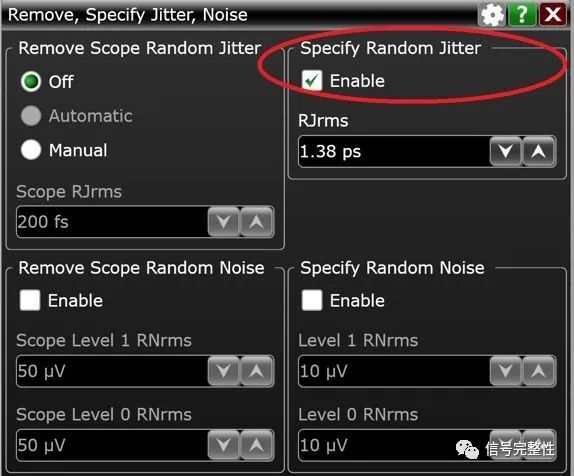
圖20 EZJIT PLUS軟件里手動(dòng)去除RJ分析ABUJ示意圖
近10年左右,除了在信號(hào)水平方向進(jìn)行更加深入的抖動(dòng)分析外,在信號(hào)的垂直方向進(jìn)行噪聲和干擾分析也慢慢開(kāi)始興起,但相比水平方向的抖動(dòng)對(duì)眼圖關(guān)閉和系統(tǒng)BER影響的理論比較成熟,業(yè)界在垂直方向噪聲和干擾對(duì)垂直方向眼圖閉合分析的理論依然在發(fā)展中。
垂直方向噪聲和干擾對(duì)信號(hào)傳輸?shù)挠绊懙姆治龉δ苣壳霸贙eysight采樣示波器N1000系列的N1010100A軟件包和實(shí)時(shí)示波器的 EZJIT Complete 軟件中均可支持:
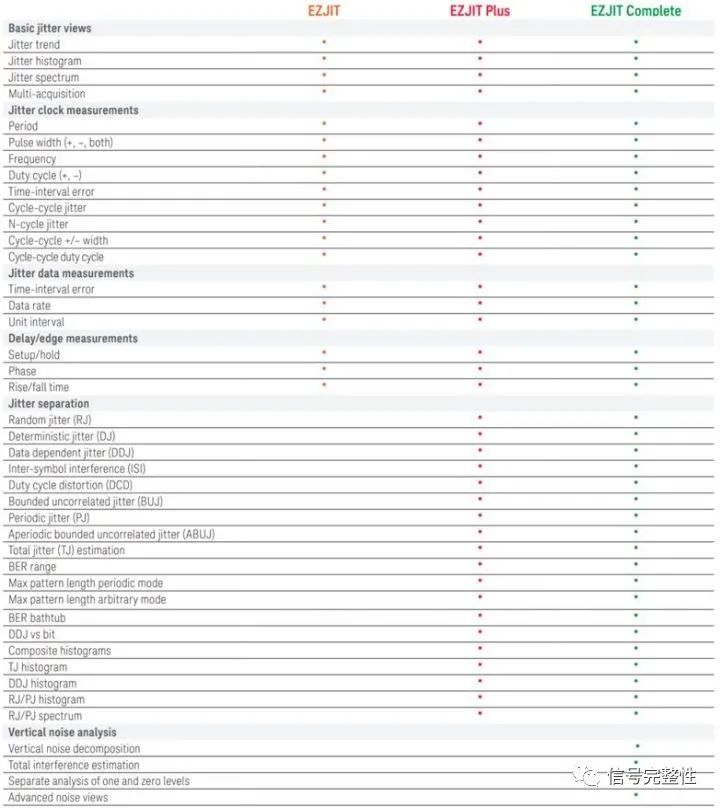
圖21 EZJIT軟件3個(gè)等級(jí)提供強(qiáng)大的測(cè)量和分析能力
抖動(dòng)測(cè)量和分析的理論將一直隨著被研究的信號(hào)標(biāo)準(zhǔn)的發(fā)展而發(fā)展,因此其步伐也不會(huì)停止,因此本文所列演進(jìn)和挑戰(zhàn)也只能是略舉一二例罷了。
4 影響抖動(dòng)測(cè)試結(jié)果和精度的因素
抖動(dòng)測(cè)量和分析在今天的串行數(shù)據(jù)電路設(shè)計(jì)和測(cè)試中的重要意義不言而喻,因此如何進(jìn)行精確測(cè)量當(dāng)然也成為每個(gè)工程師都關(guān)心的問(wèn)題。
首先針對(duì)被測(cè)信號(hào)在示波器上要做出正確的測(cè)量設(shè)置。這些正確設(shè)置包括恰當(dāng)?shù)拇怪笨潭仍O(shè)置,通常建議信號(hào)在垂直刻度方向占滿7格左右即用足垂直顯示精度。
水平方向主要包括足夠的采樣率設(shè)置和存儲(chǔ)深度,對(duì)實(shí)時(shí)采樣示波器而言,采樣率應(yīng)當(dāng)滿足所用帶寬的2.5倍以上。存儲(chǔ)深度不足導(dǎo)致波形采集數(shù)據(jù)不足可能會(huì)導(dǎo)致實(shí)時(shí)示波器不能進(jìn)行正確的時(shí)鐘恢復(fù)。太長(zhǎng)的存儲(chǔ)深度則會(huì)導(dǎo)致數(shù)據(jù)波形過(guò)大,運(yùn)算速度變慢。
因此建議按照規(guī)范或標(biāo)準(zhǔn)數(shù)據(jù)量捕獲波形進(jìn)行分析,比如部分標(biāo)準(zhǔn)或規(guī)范通常推薦1M UI進(jìn)行分析,USB3.x和PCIE3.0即是如此,當(dāng)然到PCIE4.0已經(jīng)更改為2M UI。
對(duì)一般性串行數(shù)據(jù)抖動(dòng)分析,應(yīng)當(dāng)達(dá)到100K UI量級(jí)數(shù)據(jù)以上。有時(shí)部分標(biāo)準(zhǔn)需要進(jìn)行SSC(擴(kuò)頻時(shí)鐘)測(cè)量,如果進(jìn)行手動(dòng)分析,建議根據(jù)需要測(cè)量的SSC周期數(shù)和所用采樣率計(jì)算恰當(dāng)?shù)牟蓸由疃取?/p>
另外針對(duì)信號(hào)的閾值(Threshold)設(shè)置和遲滯(Hysteresis)設(shè)置也非常關(guān)鍵,通常建議設(shè)置信號(hào)幅度一半的電平為閾值,差分總線通常為0V。
針對(duì)一些有共模偏置的信號(hào)建議先手動(dòng)測(cè)量信號(hào)幅度和共模電壓以選取準(zhǔn)確的閾值。準(zhǔn)確遲滯設(shè)置也非常重要,因?yàn)榭梢员苊馐静ㄆ鲗⑿盘?hào)邊沿上的一些因?yàn)榉瓷鋵?dǎo)致的不連續(xù)誤判為ISI抖動(dòng)的一個(gè)bit。
如下圖示,左邊設(shè)置的遲滯門限較低,因此會(huì)將波形上升沿上的一個(gè)回勾當(dāng)作一個(gè)有效bit,顯然這會(huì)被歸入ISI抖動(dòng),右邊遲滯設(shè)置電平門限拉高就會(huì)對(duì)這個(gè)回勾忽略不計(jì)。
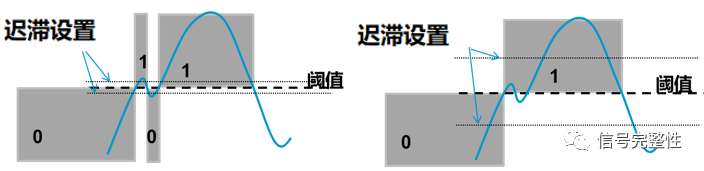
圖22 準(zhǔn)確的遲滯設(shè)置避免將波形回勾計(jì)為一個(gè)bit的ISI抖動(dòng)
如果想獲得準(zhǔn)確TIE測(cè)量結(jié)果,還有一個(gè)必須強(qiáng)調(diào)的是準(zhǔn)確的遵循被測(cè)信號(hào)規(guī)范設(shè)置的時(shí)鐘恢復(fù)算法,這是實(shí)時(shí)示波器進(jìn)行抖動(dòng)分析和分解的重要基礎(chǔ)。相關(guān)信息請(qǐng)閱讀各標(biāo)準(zhǔn)規(guī)范。
其它還包括在上期提到的關(guān)于EZJIT Plus如何進(jìn)行抖動(dòng)分解的一些設(shè)置,比如ISI濾波器的大小(Filter Size),Rj帶寬等等。
總之,如果要進(jìn)行一次準(zhǔn)確的抖動(dòng)分析和測(cè)量,涉及的知識(shí)非常廣泛的,操作也略顯繁瑣。因此在對(duì)抖動(dòng)測(cè)試不甚熟悉的情況下建議使用示波器上的抖動(dòng)測(cè)試向?qū)?Setup Wizard),抖動(dòng)向?qū)?huì)對(duì)信號(hào)進(jìn)行自動(dòng)設(shè)置,包括信號(hào)刻度及閾值和遲滯等。建議安裝Keysight實(shí)時(shí)示波器離線軟件D9010BSEO進(jìn)一步深入了解。
除了操作層面外,儀器的哪些指標(biāo)對(duì)抖動(dòng)測(cè)量的結(jié)果和精度會(huì)有比較大的影響呢?或者如何選擇一個(gè)恰當(dāng)?shù)氖静ㄆ魍瓿深A(yù)設(shè)的目標(biāo)或工作呢?
首先是測(cè)量系統(tǒng)的恰當(dāng)帶寬。
測(cè)量系統(tǒng)帶寬包括示波器和探頭與電纜及夾具等連接部件等,如果不符合標(biāo)準(zhǔn)和規(guī)范要求,低于規(guī)范要求帶寬則會(huì)帶來(lái)信號(hào)輸入鏈路額外的ISI抖動(dòng)。
在今天已經(jīng)普遍應(yīng)用的針對(duì)電纜夾具和探頭的去嵌技術(shù)如N2809A—Precision Probe和包含InfiniiSim的D9020ASIA分析套件也可以部分解決這些效應(yīng),當(dāng)然也會(huì)帶來(lái)額外的副作用即同步放大了儀器的本底噪聲,必然帶來(lái)額外誤差。過(guò)高帶寬也是不推薦的,因?yàn)闀?huì)引入更多的高頻帶噪聲。
其次實(shí)時(shí)示波器的采樣率也會(huì)有影響。
通常更高采樣率會(huì)有更高精度。顯而易見(jiàn),更高采樣率會(huì)有更高的分辨率和邊沿解析度,對(duì)最終的抖動(dòng)分析結(jié)果會(huì)有影響。
下圖是源自第三方的Jitter Labs針對(duì)PCIE Gen4 /Gen5時(shí)鐘測(cè)量結(jié)果對(duì)比,可以看到Keysight 90000A和90000X(當(dāng)前替代型號(hào)是V系列)與T公司及L公司另兩款產(chǎn)品測(cè)試結(jié)果對(duì)比。
紅色為20/25GSa/s,藍(lán)色為40G/50GSa/s,綠色為80/100GSa/s,Post-Channel和Pre-Channel指對(duì)PCIE Gen4/Gen5時(shí)鐘測(cè)試的不同測(cè)試點(diǎn)位置。很明顯在同型號(hào)產(chǎn)品上更高采樣率得到的結(jié)果更好。K公司產(chǎn)品對(duì)比T/L產(chǎn)品相對(duì)結(jié)果明顯更優(yōu),這又是什么原因呢?
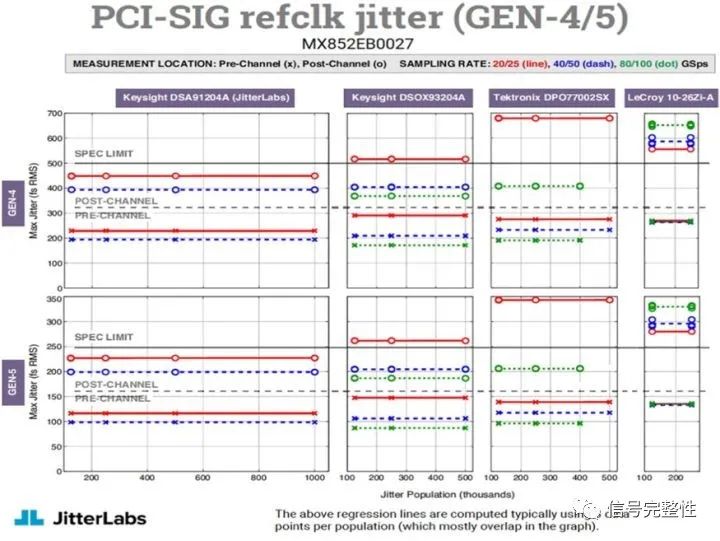
圖23 不同型號(hào)示波器不同采樣率測(cè)試結(jié)果對(duì)比
第三,儀器的本底噪聲和固有抖動(dòng)。
Keysight公司產(chǎn)品相比業(yè)界其它公司產(chǎn)品有更低的噪聲本底和固有抖動(dòng),因此在上圖Jitter Lab測(cè)量對(duì)比結(jié)果中顯示出更高的精度。
一般實(shí)時(shí)示波器在采用頻譜法進(jìn)行抖動(dòng)分析時(shí)都會(huì)采用功率譜密度積分得到RJrms值,頻譜法進(jìn)行功率譜積分時(shí)會(huì)將示波器的寬頻本底噪聲帶入到RJ的分析結(jié)果中,帶來(lái)更多的誤差。而儀器的固有抖動(dòng)也是誤差之源,參考如下公式:
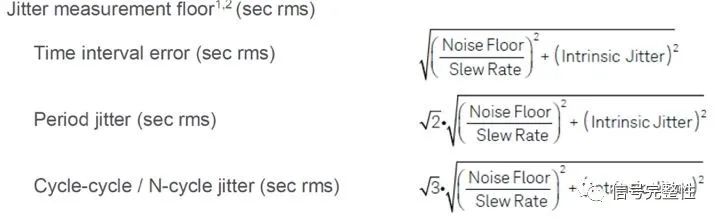
從公式中還可以看出噪聲本底和信號(hào)本身的跳變斜率(Slew Rate)相關(guān)。在今天越來(lái)越低的信號(hào)幅度,越來(lái)越快的邊沿,越來(lái)越低的裕量測(cè)試場(chǎng)景下,典型如PCIExpress規(guī)范里對(duì)CC CLK的CC Jitter描述,在32GT/s,CC Jitter Limits達(dá)0.15ps RMS,對(duì)實(shí)時(shí)示波器的測(cè)量精度提出了更高要求:
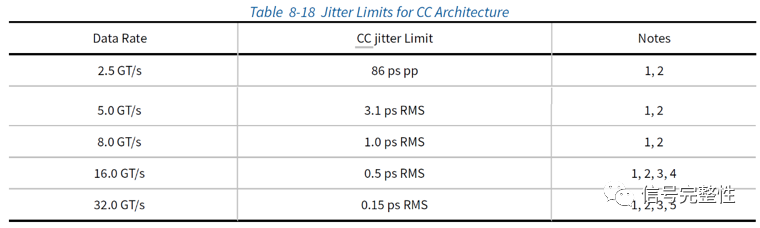
圖24 PCIExpress5.0規(guī)范對(duì)CC Jitter Limit的要求
為了滿足這些標(biāo)準(zhǔn)和規(guī)范的最新要求,業(yè)界除了在算法上做出一些改進(jìn)和提高外,Keysight公司在EZJIT Plus/Complete軟件里提供了去除示波器本身的隨機(jī)抖動(dòng)和噪聲的選項(xiàng),從而去除測(cè)量誤差提高測(cè)量精度。
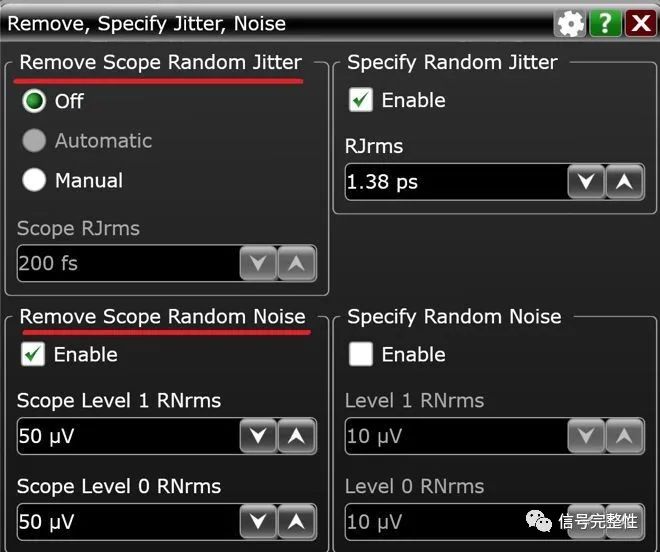
圖25 EZJIT COMPLETE軟件提供去除示波器隨機(jī)抖動(dòng)和噪聲功能
另外捕獲足夠時(shí)長(zhǎng)的波形用于數(shù)據(jù)分析也是抖動(dòng)測(cè)試中的一個(gè)關(guān)鍵。
因?yàn)樽銐虻牟ㄐ螖?shù)據(jù)和捕獲時(shí)長(zhǎng)除了可以捕獲更多的時(shí)鐘周期或數(shù)據(jù)UI進(jìn)行更準(zhǔn)確的抖動(dòng)分析外也意味著可以捕獲更低頻的抖動(dòng)因?yàn)椴东@的整個(gè)波形周期更長(zhǎng),這也是示波器長(zhǎng)存儲(chǔ)的重要價(jià)值之一。
因此在選擇和購(gòu)買示波器的時(shí)候,推薦選擇具有更長(zhǎng)存儲(chǔ)深度配置的產(chǎn)品。
以上談到了實(shí)時(shí)示波器的4個(gè)影響抖動(dòng)測(cè)量精度的主要因素或指標(biāo),雖然抖動(dòng)軟件的分析算法一直與時(shí)代同步進(jìn)行提高和改進(jìn),但是在實(shí)際工作中盡量選擇更高精度的設(shè)備依然是獲得高精度的測(cè)量結(jié)果的最有力保障。
從抖動(dòng)測(cè)試到相噪測(cè)試——實(shí)時(shí)示波器的新戰(zhàn)場(chǎng)
實(shí)時(shí)示波器因?yàn)槠涓卟蓸勇氏麻L(zhǎng)存儲(chǔ)和重復(fù)單次采樣能力在抖動(dòng)分析應(yīng)用領(lǐng)域成為主力設(shè)備。隨著數(shù)據(jù)速率的持續(xù)提高,裕量的下降,比如前面提到的PCIE5.0規(guī)范中關(guān)于CC Jitter 的要求,僅從時(shí)域角度進(jìn)行測(cè)量已經(jīng)顯得捉衿見(jiàn)肘。

InfiniiVision 實(shí)時(shí)示波器-
利用超快的波形捕獲率執(zhí)行一般性日常調(diào)試,更快地捕獲毛刺信號(hào)

Infiniium 實(shí)時(shí)示波器-
利用超高帶寬、超低本底噪聲和高 ENOB 的示波器,輕松獲得開(kāi)發(fā)下一代技術(shù)時(shí)所需的信號(hào)完整性
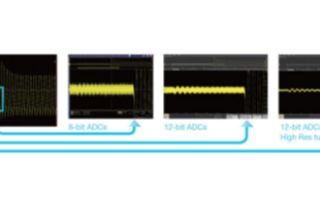
另一方面隨著近幾年實(shí)時(shí)示波器的ADC位數(shù)從8bit向10bit全面升級(jí),實(shí)時(shí)示波器的無(wú)雜散動(dòng)態(tài)范圍(Spurious Free Dynamic Range)等指標(biāo)得到了全面提高,典型如Keysight公司的 S和UXR系列實(shí)時(shí)示波器已經(jīng)實(shí)現(xiàn)了從500MHz--8GHz和13--110GHz 硬件10bit ADC的全天候覆蓋,其本身的SFDR指標(biāo)均非常優(yōu)異。因此實(shí)時(shí)示波器也開(kāi)始進(jìn)入頻域指標(biāo)測(cè)量領(lǐng)域,比如相位噪聲,Phase Noise。
首先來(lái)看什么是相位噪聲?
在維基百科中,相位噪聲的定義是“時(shí)域不穩(wěn)定性(抖動(dòng))導(dǎo)致波形在相位上發(fā)生快速、短期、隨機(jī)的波動(dòng),這種波動(dòng)在頻域中的表現(xiàn)即為相位噪聲”。這一術(shù)語(yǔ)中的“噪聲”一詞告訴我們,它指的不是雜散或確定性波動(dòng)。
定義中提到的“短期”是為了與確定時(shí)鐘源純凈度時(shí)所用的其他方法加以區(qū)別,例如以百萬(wàn)分之幾(ppm)為單位的穩(wěn)定度。它通常是以更大的時(shí)間長(zhǎng)度進(jìn)行測(cè)量,例如秒或分鐘。
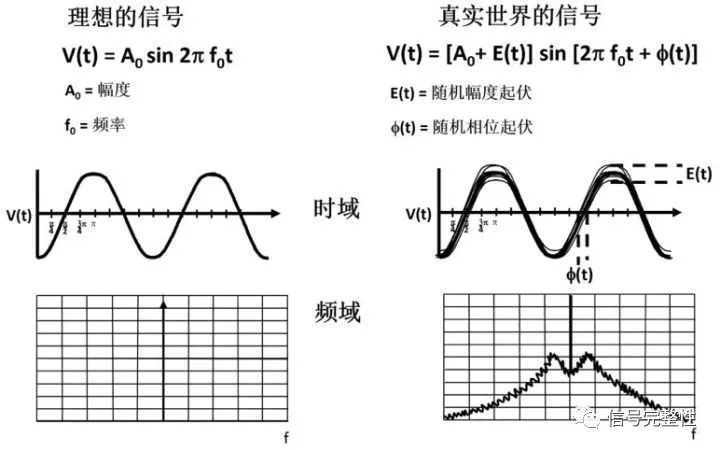
圖26 理想與真實(shí)信號(hào)在時(shí)域和頻域的對(duì)比
雖然有許多技術(shù)術(shù)語(yǔ)可以量化相位噪聲,但最常采用的指標(biāo)之一是“單邊帶(SSB)相位噪聲”,L(f)。在數(shù)學(xué)上,美國(guó)國(guó)家標(biāo)準(zhǔn)與技術(shù)研究院(NIST)將L(f)定義為從載波的偏移頻率處的功率密度與載波信號(hào)的總功率之比,單位為dBc/Hz:

基于頻域相噪的測(cè)量結(jié)果可以再轉(zhuǎn)化為時(shí)域的相位抖動(dòng),這就是數(shù)字和時(shí)域研究人員感興趣的結(jié)果。如下圖示,相位抖動(dòng)可以對(duì)陰影頻帶范圍內(nèi)相噪進(jìn)行積分得到。
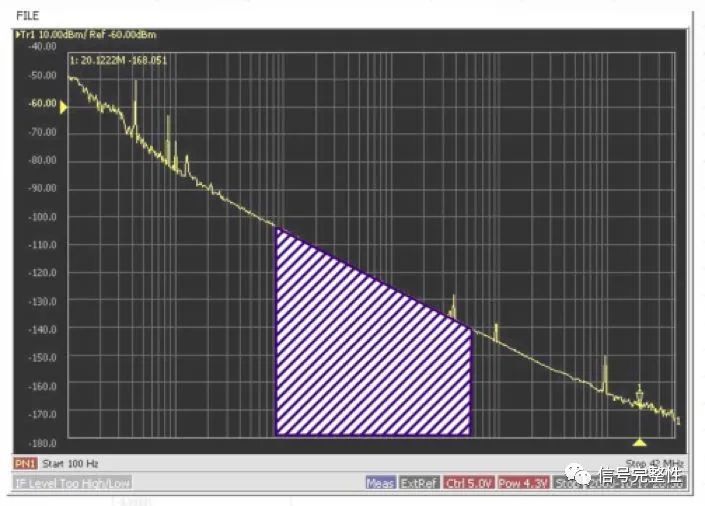
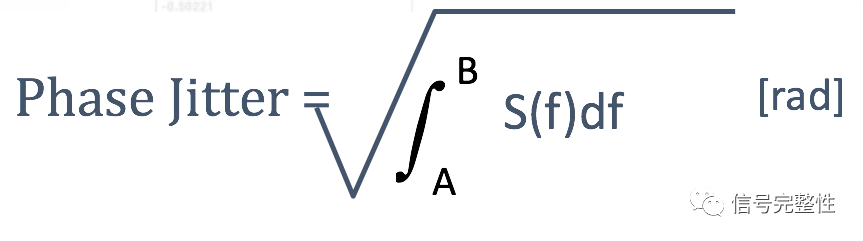
圖27 基于相噪測(cè)量得到相位抖動(dòng)
對(duì)于傳統(tǒng)的數(shù)字領(lǐng)域的公司和工程師而言,如果為了測(cè)試相位噪聲而專門進(jìn)行相位噪聲測(cè)量?jī)x器的投資,很明顯其性價(jià)比是不高的。因此發(fā)掘現(xiàn)有設(shè)備的潛能讓其發(fā)揮更大作用,也是一個(gè)不錯(cuò)的選擇,而普遍存在的實(shí)時(shí)示波器當(dāng)然是最佳的選擇。
相比其它頻域儀器測(cè)量方法,采用實(shí)時(shí)示波器進(jìn)行相噪分析的優(yōu)點(diǎn)除了節(jié)約投資外主要還有實(shí)時(shí)示波器可以測(cè)量方波時(shí)鐘信號(hào)或者帶SSC(擴(kuò)頻時(shí)鐘)的時(shí)鐘信號(hào)相噪,尤其是SSC擴(kuò)頻時(shí)鐘在高速串行數(shù)據(jù)標(biāo)準(zhǔn)如PCIExpress/USB等參考時(shí)鐘信號(hào)里是相當(dāng)常見(jiàn)的。
另外采用實(shí)時(shí)示波器的方法可以測(cè)量100MHz以上的時(shí)鐘頻率偏移,而頻域儀器一般限定在100MHz范圍內(nèi)。針對(duì)數(shù)字域常見(jiàn)的差分信號(hào),示波器可以采用高阻探頭直接探測(cè)或者采用2個(gè)通道輸入再進(jìn)行差分運(yùn)算,無(wú)需額外的附件Balun(巴倫)。
當(dāng)然實(shí)時(shí)示波器還可以直接測(cè)量傳遞到數(shù)據(jù)信號(hào)上的相位噪聲。實(shí)時(shí)示波器還有強(qiáng)大的數(shù)據(jù)存儲(chǔ)和記錄能力可以保存波形用于傳統(tǒng)的數(shù)字分析工具比如PCIExpress 標(biāo)準(zhǔn)的CLK Jitter Tool等。
總而言之,采用實(shí)時(shí)示波器進(jìn)行相位噪聲的分析和測(cè)試,不僅可以發(fā)揮實(shí)時(shí)示波器的作用節(jié)約投資,而且針對(duì)頻域測(cè)量?jī)x器在數(shù)字標(biāo)準(zhǔn)和信號(hào)上的不足提供了更多優(yōu)點(diǎn):
支持更廣泛信號(hào)類型
更廣泛的時(shí)鐘信號(hào)如方波、帶SSC時(shí)鐘、數(shù)據(jù)信號(hào)
更簡(jiǎn)便豐富的連接方式無(wú)需Balun以及探頭
更輕松的電纜接入
更大的頻率偏移支持能力
……
Keysight公司在2018年推出了基于Infinium系列實(shí)時(shí)示波器的D9010/D9020JITA抖動(dòng)/噪聲/相噪分析軟件,除了包含EZJIT Complete的全部功能外,還提供了功能強(qiáng)大的相噪測(cè)試功能:
將單邊帶(SSB)相位噪聲繪制為對(duì)數(shù)頻率與dBc / Hz
使用2個(gè)通道和交叉相關(guān)來(lái)降低寬帶測(cè)量噪聲
通過(guò)降低寬帶測(cè)量噪聲來(lái)測(cè)量差分時(shí)鐘的相位噪聲
測(cè)量帶擴(kuò)頻調(diào)制(SSC)時(shí)鐘的相位噪聲
減少交叉相關(guān)時(shí)間間隔誤差(TIE)測(cè)量中的寬帶噪聲(RJ)
在相位噪聲圖上測(cè)量?jī)蓚€(gè)頻率之間的積分抖動(dòng)
使用InfiniiMax探頭測(cè)量電路中的時(shí)鐘/數(shù)據(jù)相位噪聲
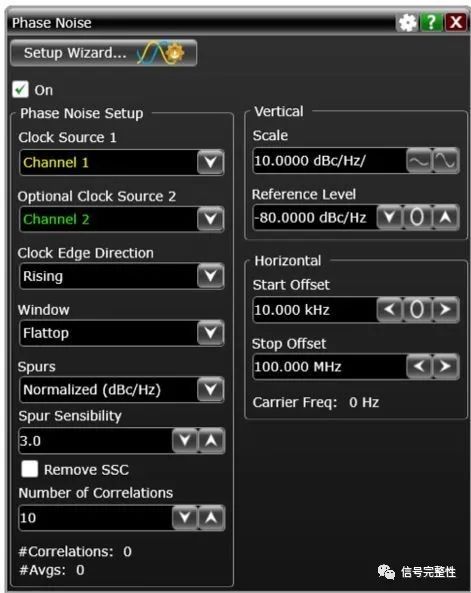
圖28 D9010/D9020 JITA軟件相噪測(cè)試設(shè)置

圖29 D9010/9020 JITA 單邊帶相位(SSB)噪聲測(cè)量結(jié)果
基于相噪測(cè)量結(jié)果,然后在測(cè)量菜單下選擇FFT →Phase Jitter項(xiàng)目,參照下圖,選擇感興趣的頻帶,就可以得到Phase Jitter測(cè)量結(jié)果,如下圖示:
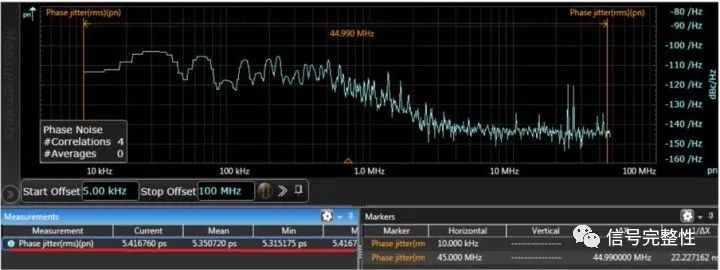
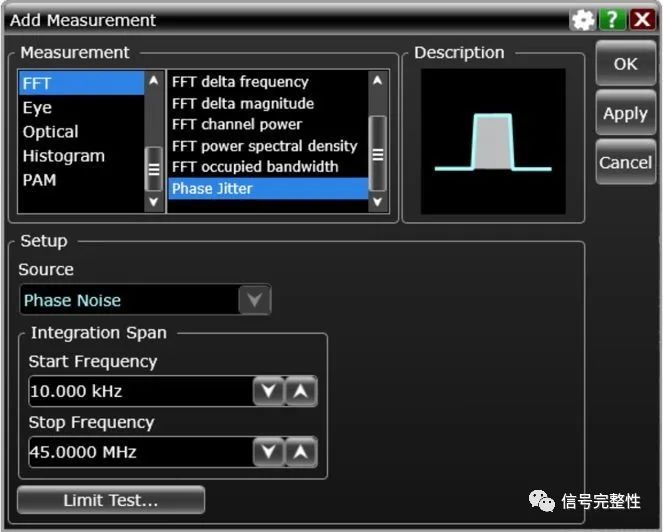
圖30 基于相噪測(cè)試結(jié)果的相位抖動(dòng)測(cè)量
為了獲得更精確的測(cè)量結(jié)果,相噪測(cè)試時(shí)還可以進(jìn)行2-通道互相關(guān)降低儀器本底噪聲。時(shí)鐘信號(hào)通過(guò)功分分成兩個(gè)信號(hào)輸入到示波器的兩個(gè)通道,可以執(zhí)行雙通道互相關(guān)技術(shù)。
時(shí)鐘信號(hào)可以是單端或差分(如果差分信號(hào)則建議分別針對(duì)正負(fù)信號(hào)經(jīng)過(guò)功分后用SMA電纜接入1-3或2-4通道)。然后在通道上執(zhí)行互相關(guān)操作,如下圖30所示。
通過(guò)每個(gè)通道的DUT噪聲是相干的并且不受互相關(guān)的影響,而每個(gè)通道產(chǎn)生的內(nèi)部噪聲是不相干的,并且以或者的速率通過(guò)互相關(guān)運(yùn)算減少,其中M是進(jìn)行波形相關(guān)運(yùn)算的采集數(shù)量,采用的波形相關(guān)運(yùn)算數(shù)量越大則進(jìn)行平均運(yùn)算時(shí)的速度越慢。
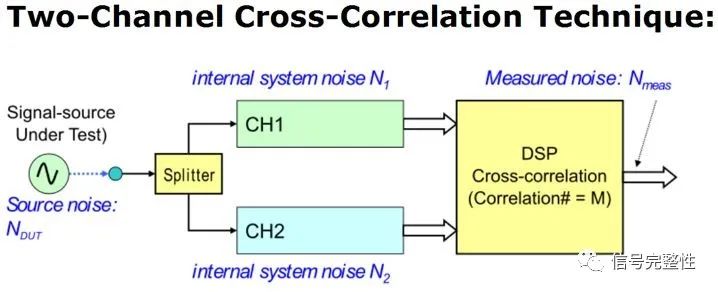
圖31 雙通道互相關(guān)降低儀器本底噪聲示意
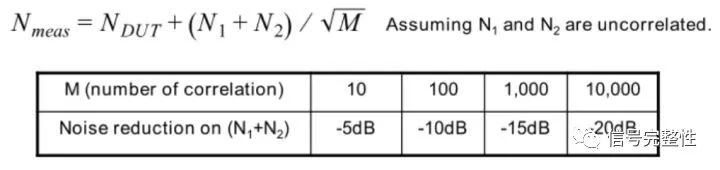
圖32 相關(guān)運(yùn)算數(shù)量和降低噪聲性能對(duì)應(yīng)關(guān)系
相噪測(cè)試為實(shí)時(shí)示波器進(jìn)入頻域測(cè)量打開(kāi)了另一扇窗戶,尤其是針對(duì)數(shù)字和時(shí)域信號(hào)日益增長(zhǎng)的頻域測(cè)試需求。
-
嵌入式
+關(guān)注
關(guān)注
5068文章
19017瀏覽量
303253 -
數(shù)字電路系統(tǒng)
+關(guān)注
關(guān)注
0文章
4瀏覽量
5597 -
抖動(dòng)測(cè)試
+關(guān)注
關(guān)注
0文章
4瀏覽量
8799
原文標(biāo)題:10000字詳解抖動(dòng)和抖動(dòng)測(cè)試
文章出處:【微信號(hào):mcu168,微信公眾號(hào):硬件攻城獅】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
影響示波器測(cè)試精度的因素有哪些,有什么解決方案
數(shù)字示波器的高精度抖動(dòng)測(cè)試方法
適用于OC-192/STM-64高速產(chǎn)品設(shè)計(jì)的抖動(dòng)測(cè)試技術(shù)zz
為時(shí)鐘源加入抖動(dòng)之前需要考慮哪些因素?
什么是抖動(dòng)? 抖動(dòng)的引發(fā)因素是什么?
如何管理不同的測(cè)試結(jié)果?
電機(jī)扭矩測(cè)量結(jié)果和傳感器精度對(duì)不上,咋辦?
電機(jī)扭矩測(cè)量和傳感器精度對(duì)不上怎么辦 扭矩測(cè)試關(guān)鍵因素點(diǎn)是什么

為什么要測(cè)抖動(dòng),測(cè)試抖動(dòng)之前要注意哪些問(wèn)題
如何選擇實(shí)時(shí)示波器進(jìn)行抖動(dòng)測(cè)試和分析,有哪些關(guān)鍵因素

磐石測(cè)控:深圳拉力試驗(yàn)機(jī)影響測(cè)試精度有哪些因素?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論