 超構表面增強視場激光雷達概念設計
超構表面增強視場激光雷達概念設計
自動駕駛汽車和倉儲機器人等自主運行系統包含了多種傳感器,以獲取關于周圍環境的信息,用于實時確定其位置、速度和加速度。其中,測距傳感器,尤其是光學測距傳感器,為機器人系統提供了視覺能力,成為工業過程自動化的核心,即所謂的“4.0工業”革命。目前,已有多種光學成像技術集成進入工業機器人用于3D圖像信息采集,例如多目立體視覺相機、雷達、結構光相機以及激光雷達(LiDAR)等。激光雷達這一技術概念起源于上個世紀60年代初,美國麻省理工學院(MIT)的科學家報道了向月球表面發送光輻射并檢測回波信號以進行測距的方法。
基于麻省理工學院的開創性工作,激光雷達的研究一直利用激光源照射目標物體或場景,然后收集回波信號,從而重建高分辨率三維(3D)圖像。傳統的激光雷達利用了飛行時間(ToF)測量原理,即向遠處反射物體發射激光脈沖,然后測量從激光傳輸到掃描場景并返回到檢測模塊的往返時間。激光雷達所有組件必須同步工作,以標記返回脈沖,用于測距成像重建。
要實現大范圍空間感知,激光雷達光源必須能夠對大視場(FoV)進行掃描。然后,通過測量每個方向的飛行時間,逐點檢測場景中的對象,以構建光學回波圖。調幅連續波(AMCW)、調頻連續波(FMCW)或步進頻率連續波(SFCW)等其他測量原理采用恒定或時間調制頻率的連續波來測量調制光信息的往返時間。
激光雷達系統能夠對遠、中、近距離的物體或場景進行實時3D測量,在機器人視覺以外還有很多應用,例如地理測繪、大氣顆粒物探測、風速測量、靜態和/或移動物體跟蹤以及增強現實/虛擬現實(AR/VR)等。通常,根據光源是同時照射場景還是掃描場景,激光雷達可以分為非掃描式(例如Flash激光雷達)或掃描式系統。
掃描式激光雷達系統通常包含三個關鍵組件:(i)光源,(ii)光束操縱掃描模塊,以及(iii)探測系統,以高速重建從場景中接收到的光學信息。過去幾十年來,基于納米光子學的激光雷達系統蓬勃發展,提出了更先進的掃描和探測技術。預計激光雷達將在汽車行業大規模用于高級駕駛輔助系統(ADAS),以及全自動駕駛,這為其光速操縱掃描系統提出了新挑戰,包括低制造復雜性、規模制造、成本、重量、耐振動等。
目前,工業應用的激光雷達主要采用宏觀機械系統掃描整個360°視場。除了視場大以外,這類體積龐大的系統成像速度有限,只有幾十赫茲。對于宏觀機械式光束掃描,MEMS光束操縱方案是有前景的發展方向,它可以將掃描頻率提升至kHz范圍。然而,MEMS光束操縱方案的一個主要缺點是視場小,通常水平掃描不超過25°,垂直掃描不超過15°。
而在研究層面,采用光學相控陣(OPA)方案的光束操縱可以提供卓越的掃描速度,以及60°左右的視場。不過,由于其制造方面的挑戰,OPA方案在不遠的將來還不太可能在工業級系統中大規模部署。工業上成熟的液晶調制器也不足以作為激光雷達掃描儀,因為其視場角較差,通常低于20°,具體取決于波長及其調制頻率。此外,聲光偏轉器(AOD)能夠實現超快掃描(MHz),但在激光雷達領域從未被考慮過,因為其視場角太窄,最大只有2°,必須要在高速成像和大視場之間權衡。
過去十年來,超構表面(Metasurface)憑借任意調控光特性(即振幅、相位、頻率和/或偏振)的潛力,吸引了全球光子學界的高度關注。超構表面是由亞波長大小和周期性散射物體(超構原子)排列而成的平面光學元件。目前,有四種光調制機制用于構建超構表面:諧振納米顆粒的光散射、極化轉換中出現的幾何相位(Pancharatnam-Berry相位超構表面)、具有可控有效折射率(ERI)柱中的累積傳播相位以及奇點附近的拓撲相位。
通常,超構表面包含固有無源元件,旨在制造后執行固定光學功能。例如,通過正確選擇超構原子的大小和間距,超構表面能夠以廣義斯奈爾定律規定的任意但固定的角度重新定向激光束。顯然,僅無源超構表面無法用于需要實時光束操縱的激光雷達。因此,具有外部激發可調諧光學特性的材料設計或與之結合的動態超構表面,有望成為實時光束操縱的理想替代方案。
美國初創公司LUMOTIVE推出了基于其液晶超構表面專利的革命性光束操縱技術,提供了前所未有的探測范圍、分辨率及幀速率的高性能組合。該方案證明可以構建小型化、可擴展的激光雷達,但它涉及復雜的電子架構,并且對于金屬超構表面構建模塊,可能會出現嚴重的光學損耗。
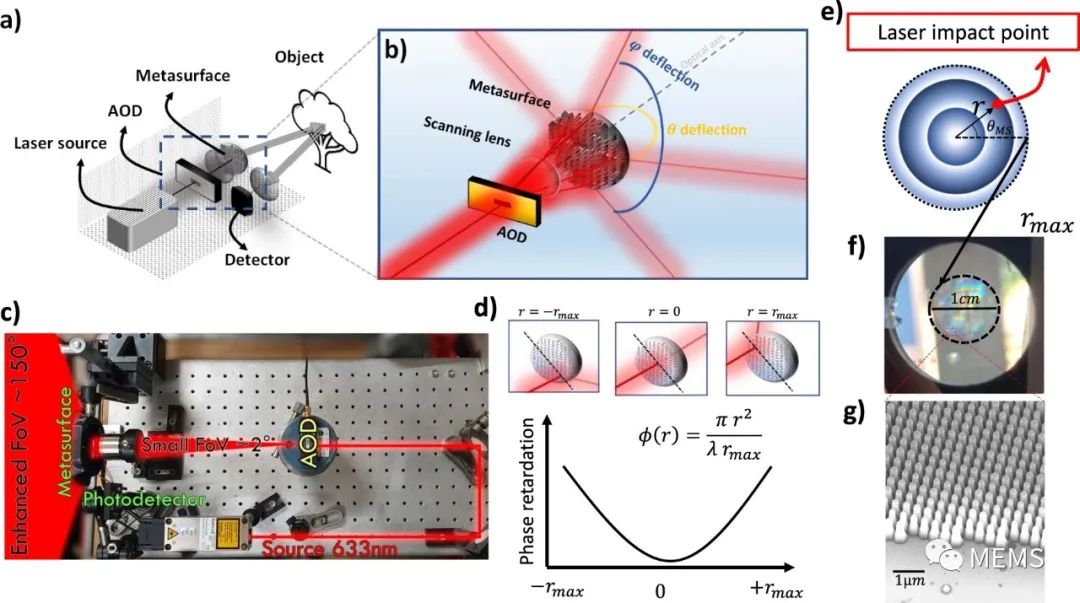
據麥姆斯咨詢介紹,法國蔚藍海岸大學(Université Cote d’Azur)的一支研究團隊提出了一種替代的高頻光束操縱方案,利用無源超構表面的光偏轉能力,將激光雷達視場擴展到150° ×?150°,并能同時實現低分辨率和高分辨率多區域成像。研究人員采用與商用AOD級聯的ERI多光束偏轉超構表面。該系統在光束掃描性能、工作波長和材料方面具有很大的靈活性。
角分辨率是指系統區分相鄰目標及檢索形狀的能力,對于需要同時進行遠距離和近距離探測的應用非常重要。研究人員開發的多區域激光雷達成像系統可以通過高幀速率同時采集具有不同空間分辨率的高場和低場區域來模擬人類視覺。超構表面極高的設計靈活性為激光雷達系統提供了極具前景的成像能力,有望開辟新的工業應用。
超構表面增強視場激光雷達概念設計
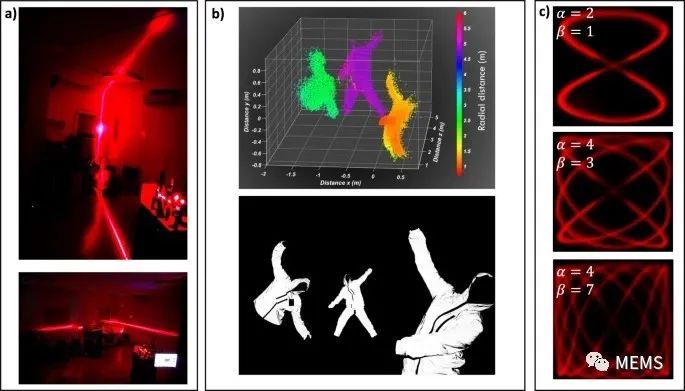
3D成像及廣角掃描性能
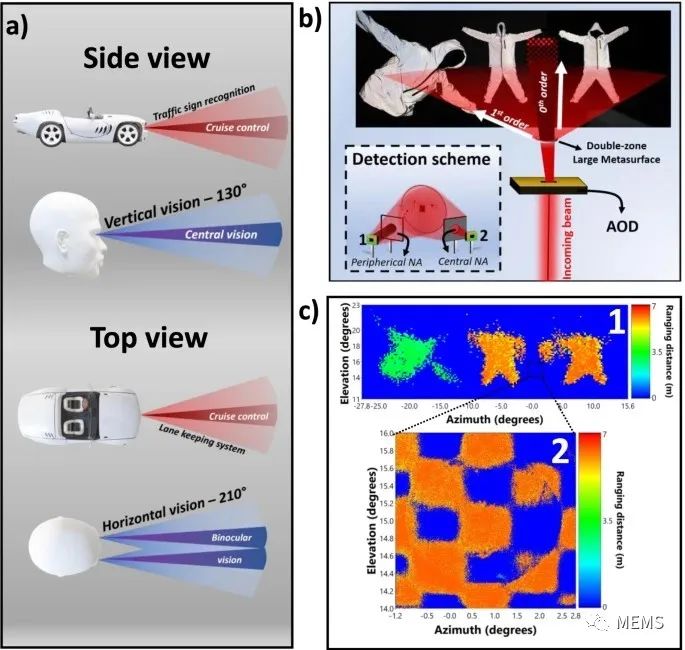
模擬人類視覺的多區域成像
該方案還提供了隨機訪問光束控制功能。超構表面在波前工程中的多功能性可以提高同時定位和測繪算法的能力。將該系統集成到ADAS中,可以為中/遠距離感知提供顛覆性解決方案,其中,中央視圖探測前方行車場景,而周邊視圖可以為行人安全提供額外的感知。
研究人員最后演示了實時成像的時間事件序列(>1k?fps,1D掃描幀速率高達MHz)。該系統展示了優于現有激光雷達技術的性能,能夠大幅減少機器人和ADAS系統的決策延時,面向未來應用極具前景。
審核編輯:郭婷
-
激光雷達
+關注
關注
967文章
3943瀏覽量
189625 -
自動駕駛
+關注
關注
783文章
13694瀏覽量
166166
原文標題:超構表面增強激光雷達,提升大視場和多區域成像能力
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
使用BLDC電機助力機械掃描激光雷達實現360度視場
激光雷達分類以及應用
常見激光雷達種類
激光雷達面臨的機遇與挑戰
消費級激光雷達的起航
固態激光雷達
激光雷達
固態設計激光雷達
激光雷達除了可以激光測距外,還可以怎么應用?
由iphone12說說激光雷達 FMCW激光雷達 精選資料分享
如何使用BLDC電機助力機械掃描激光雷達實現360度視場

Lumotive光控超構表面技術開發固態激光雷達解決方案






 工商網監
工商網監
評論