 智能汽車域控制器的以太網子系統的實現
智能汽車域控制器的以太網子系統的實現
汽車工業的發展反映在現代汽車所提供的功能和服務的擴展上。為了使所有這些功能得到執行,也有必要增加車輛內的物理組件的數量。隨著整個系統的發展,連接系統內各實體的問題也隨之而來。系統的有效簡化是通過引入域控制器來實現的,并根據它們所執行的功能來分離物理組件,同時在域控制器之間建立骨干通信網絡。在自動駕駛發展的推動下,對時間的要求和其他性能的要求,要求在這個通信網絡主干上使用新的標準和解決方案。這些解決方案之一是汽車以太網。在本文中,將介紹和評估自主車輛的域控制器的以太網子系統的實現。
I.簡介
多年來,在實現自動駕駛的嘗試推動下,硬件和軟件技術取得的進步,為汽車行業樹立了新的全球趨勢。自主駕駛的基礎是實現對環境的高質量感知,處理觀察到的環境的算法,計算機動性,即計劃必要的行動和執行最佳操作。為了使這些和許多其他的算法、功能和不同重要程度的服務(導航、系統安全和穩定性控制等)得到成功實施,有必要在車輛系統中引入許多傳感器、傳感器數據處理單元以及執行器。為了達到更安全、更舒適和更高效的駕駛的最終目標,系統組件之間的數據交換以及汽車內部傳輸所需的電線的增加是顯而易見的。這導致了控制不同服務的ECU數量的大幅增加,因此,以快速和可靠的數據交換為目的的聯網是至關重要的。被稱為域控制器的高性能組件是一種解決方案,用于以特定領域的方式對系統進行重新排序,并將其中的不同單元相互連接。
到目前為止,一些總線,如LIN、CAN、FlexRay、MOST等,在車輛內部ECU的聯網和通信方面發揮了主要作用,并實際占主導地位。
由于沒有對每個使用情況最合適的終極總線,所以應該使用哪種總線是由給定的要求決定的。然而,這種異質性使系統變得更加復雜,研究人員投入了大量精力來創建一個可靠的解決方案,將所有這些技術放在一起,并代表每輛車的通信骨干。最近提出的方法之一是以太網。最初,它只用于診斷,因為它不符合工業的要求。也就是說,它有太多的噪音,由于布線的原因,實施起來很費勁,而且它不提供同步性 和確定性。然而,這種情況隨著汽車以太網的發展
而改變。
本文將介紹以太網子系統作為車輛內通信主干的實現。該子系統是自主駕駛領域控制器的一部分,它是基于菊花鏈拓撲結構的。它由三個連續連接的網絡交換機及其外圍設備組成。在第二節中,提出了滿足汽車工業要求的關鍵挑戰。第三節將對系統的結構和數據流進行描述。第四節和第五節包含評估、結果討論、結論和未來工作建議。
II.相關工作
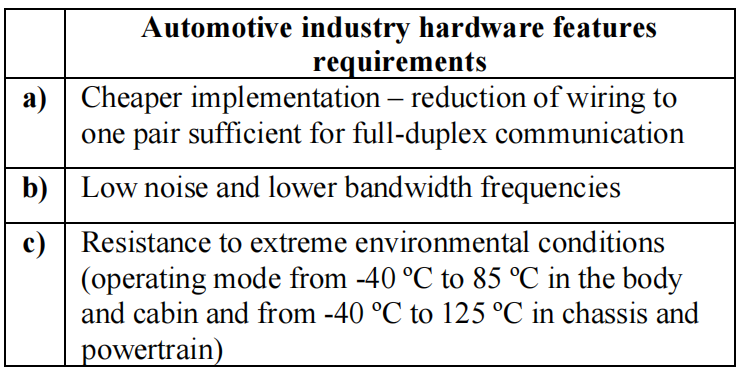
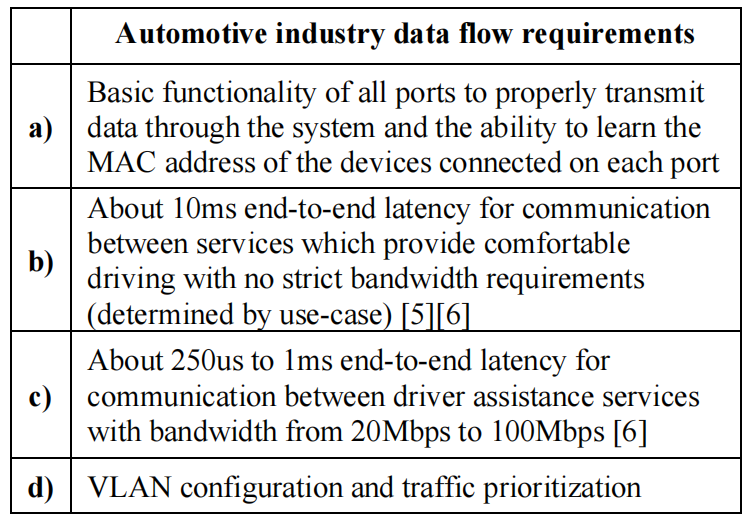
以太網是最廣泛的通信技術,由各種標準集定義,為各種使用情況進行優化。它也涵蓋了各種拓撲結構選項。為了作為車輛內適當的通信主干,以太網必須滿足汽車行業的特定要求。這些要求可以分為兩組--硬件功能要求和與數據流有關的要求,分別如表一和表二所示。
由于其可擴展性、靈活性、可用性和與其他通信技術的兼容性,以太網已被改編并作為新一代的車內網絡引入到車輛。快速以太網標準100Base-TX和1000Base-T有足夠的帶寬(100/1000 Mbps),但沒有合適的物理規格。兩對或四對電線是一個非常昂貴的解決方案,因為電線是任何汽車中第三大最昂貴和第三大重量元素。較高的帶寬頻率、不必要的長距離和對不良外部條件的抵抗力也不是汽車工業的有利特征。
2011年12月,BroadR-Reach被開發為汽車以太網的特殊標準時,開放聯盟社區優化了上述物理特性。
表一 以太網硬件特性要求
表二 以太網數據流要求
然而,關于實時以太網協議的利用,仍有一些公開的討論,在時間觸發以太網和時間敏感網絡之間沒有明確的選擇,以提供確定性、同步性和可靠性。
就以太網在車輛中的使用方式而言,不同的作者考慮了幾種通信網絡結構。由于ECU數量的增加和它們的集成問題,分散的、網狀的系統結構實際上是不可能的。一些作者專注于集中式系統,但仍然假設存在一個可以由ECU內部處理的單一信息源。
在本文中,通信網絡將以領域控制的分層方式組織,其中以太網代表不同領域之間的主干和互連。單一領域內的網絡拓撲結構不是本文的重點,應該根據特定的使用情況和需要連接的外圍設備的數量來設計。
III.解決方法
A.域控制器
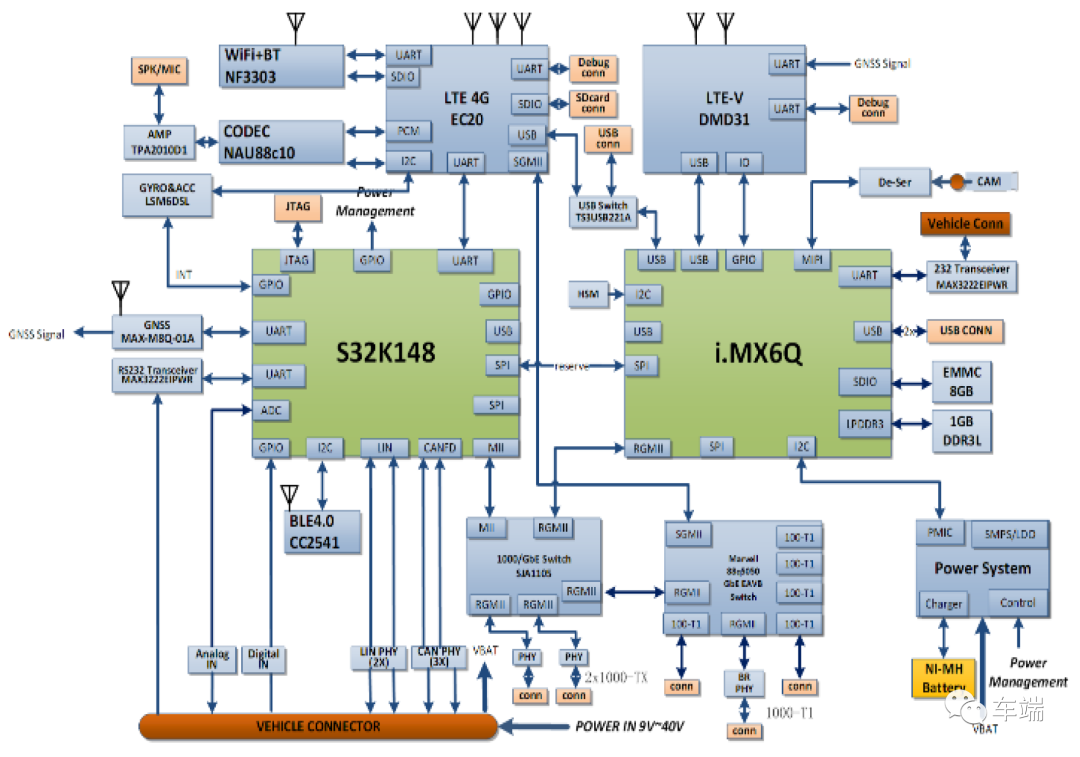
圖1說明了提供驅動輔助和控制服務的域控制器的通用架構。如前所述,系統組件是根據它們所執行的功能來分組的。例如,不同的外圍傳感器允許環境感知被連接。此外,用于處理獲得的數據的設備,以及具有通用和汽車安全關鍵功能的必要微控制器被分組。
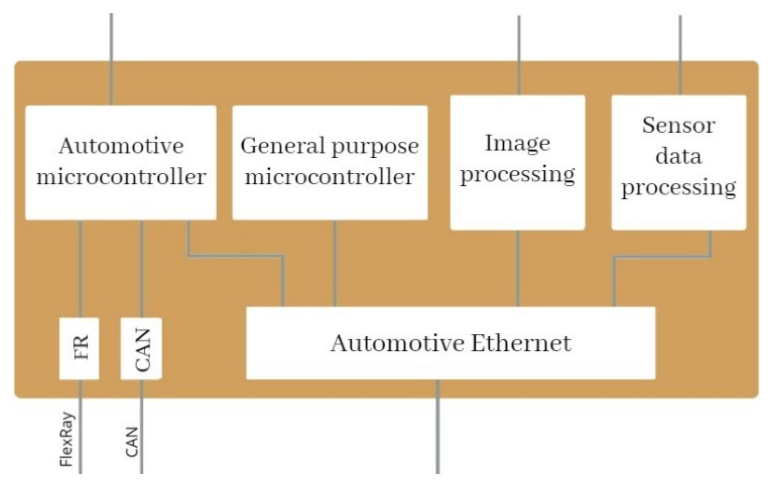
圖1. 域控制器架構抽象
汽車微控制器通常是具有安全和安保控制功能的設備,專門用于汽車行業,如Infenion Aurix、Renesas RH850,等等。另一方面,FPGA通常被用作通用微控制器,而數據處理則由某些Nvidia設備、瑞薩R-car H3等執行。采用CAN和FlexRay接口作為與發動機、剎車等動力系統域的通信接口。汽車以太網是通信的主干,它將所有設備連接成一個功能單元。
為了滿足本項目表一的物理特性要求,決定對每個組件使用IEEE的100和1000 Base-T1以太網標準。和前面提到的BroadR-Reach一樣,這些標準只使用一對電線來提供全雙工通信。帶寬頻率減半至33.3MHz,這允許利用較低質量的電纜,同時將不必要的長電纜長度從100米減少到15米。通過降低待機功耗也實現了能源效率。也啟用了回聲消除和極端天氣條件下的阻力。IEEE的標準與Broadcom在2011年提供的標準幾乎相同。唯一的區別是,在IEEE的標準中,喚醒指令期更短,并且明確規定了傳輸峰值振幅的測試。
B.系統結構和集成
由于現代車輛需要結合來自多個傳感器(通常需要至少4個攝像頭輸入、激光雷達、雷達等)、處理設備和微控制器的數據,通常需要多個網絡交換機。在本文中,我們提供了利用三個汽車以太網交換機的解決方案。交換機以線性菊花鏈拓撲結構相互連接,這是一種成本效益高、實施簡單的結構。如果節點的數量小于4個,就只能使用這種拓撲結構。當節點數達到4個時,菊花鏈應被環形拓撲結構所取代。
外圍設備以星形拓撲方式直接連接到每個交換機,因此中心設備是一個網絡交換機。這就是整個以太網子系統的混合拓撲結構的實際創建過程,其中三個網絡交換機作為關鍵元素連接在一個線性的菊花鏈結構中,在每個交換機上,設備通過使用星形拓撲結構的技術進行連接。
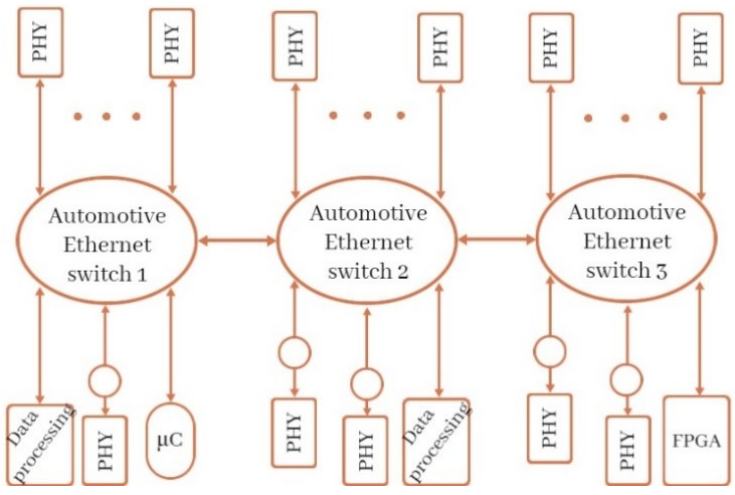
圖2. 以太網子系統結構
在圖2中,顯示了以太網子系統的確切結構。來自網絡交換機的MAC芯片通過RGMII/SGMII媒體獨立接口連接到物理收發器(PHY)。一些交換機端口不支持所需類型的MII是一種常見的情況,因此在這種情況下,某些收發器被用作適當的媒體轉換器。這種情況涵蓋了五個端口,以測量系統中引入的潛在限制(延遲、帶寬等)。
在圖2中,轉換器在交換機和PHY之間的路徑上以圓圈表示。傳感器將通過物理收發器與開關相連,但其中一個PHY將被保留用于與PC的通信,以便進行診斷和控制。高性能的數據處理設備和微控制器具有MAC-to-MAC通信。
為了使組件成功地集成到所述的拓撲結構中,有必要根據制造商的說明將某些端口設置為工作模式:
-對于每個端口,應指出該端口是將MAC從網絡交換機連接到PHY還是連接到另一個MAC。
--對于MAC-to-MAC通信的端口,有必要手動設置端口速度。另一方面,如果交換機的端口與PHY相連,則由收發器來決定速度。
-為啟用該選項的端口設置適當的MII類型
-在連接交換機和外部CPU的端口上,應啟用遠程管理單元(RMU)。這允許通過使用外部處理器或微控制器來修改配置。
系統集成后,必須驗證其功能。為了測試流量是否通過系統的所有端口正常轉發,使用了一臺外部PC。在與汽車微控制器或數據處理設備的通信中,PC有必要在每個外部端口上正確接收和發送幀。
同時,當PC機連接到每個端口時,應從開關中讀取地址表,每次都是如此。通過讀取該表,可以確認MAC地址的學習是正確進行的。
C.數據流
數據流分析應該解決的問題之一是設備的分組方式。這將防止由于路徑的長度或流量優先級而違反某些要求。在本文描述的例子中,重要的是要確定這樣的結構及其元素的安排是否影響所需功能的實現和傳感器所能容忍的延遲。為了涵蓋所有情況,選擇了特征路徑進行測試。研究了單個交換機內部、相鄰交換機之間和非相鄰網絡交換機之間的通信情況。對于每個場景,考慮三種情況:如果路徑上沒有媒體轉換器,如果路徑上只有一個媒體轉換器,如果有兩個媒體轉換器。這樣,9條路由就足以通過測量每條路由的延遲和帶寬來分析設備調度對系統的影響。
本文還提供了一個通過使用VLAN組來實現流量優先的解決方案。在這個項目中,所有的端口都被配置為ID為7和11的VLAN成員,并有選項允許未標記的幀不被修改被傳輸。創建了三個流量優先級,0--用于無標記的流量,1--用于VID=11,7--用于VID=7。首先,發送帶有VLAN標簽的幀,這些幀與配置相對應,預計將在系統中順利傳輸。然后,創建了不符合配置的帶有錯誤VLAN標簽的幀。錯誤標記的幀預計會被802.1Q策略過濾。此外,在測試的兩部分中都進行了讀取傳輸幀的優先級并將其與預期的優先級進行比較。
IV.評估
評估的第一步是表明表一中的所有物理標準都已得到滿足。通過使用支持前幾章所述汽車以太網標準的網絡設備,這一點很容易實現。這樣一來,表一中的要求將得到滿足,如表三所示。
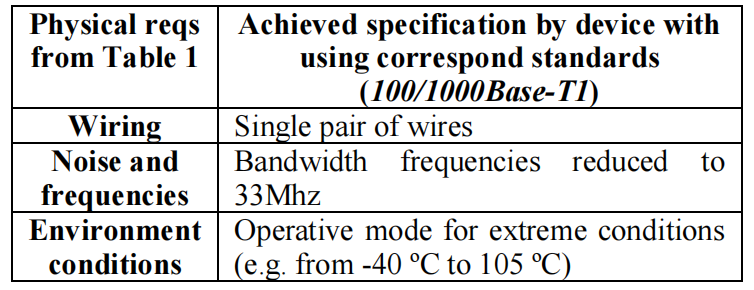
表三 實現的物理規格
為了測試表二中的基本功能,外部PC與所有帶有物理收發器的端口連接,一次一個。對于每個方案,在兩個方向(PC到微控制器,反之亦然)發送了10 000個長度為512個八位字節的幀。為了確認通過系統進行正確的流量轉發,在幀傳輸前后觀察了三種類型的幀計數器的值:接收到的所有好的幀的長度之和(InGoodOctets),接收到的所有壞的幀的長度之和(InBadOctets)和發送的所有幀的長度之和(OutOctets)。圖3顯示了一個場景示例,其中可以看到幀計數器的值是如何根據參與幀傳輸的端口上的流量方向正確地改變的,而其他端口的計數器保持不變。此外,還確認了網絡交換機維護的所有地址表都包含相關的MAC地址和相應的端口。
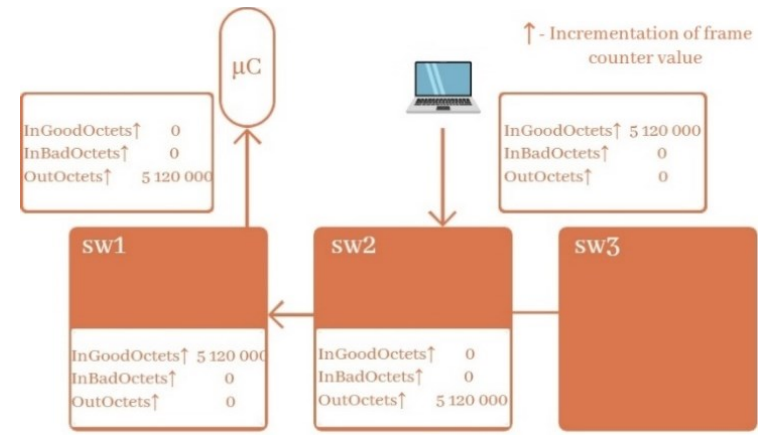
圖3. 基本幀轉發評估示例
為了檢查表二中的延遲和帶寬要求是否得到滿足,對解決方案中提到的9條路徑進行了端到端的延遲和帶寬測量。為此,使用了pcap和iperf3。表四提供了每個路徑的測量值。
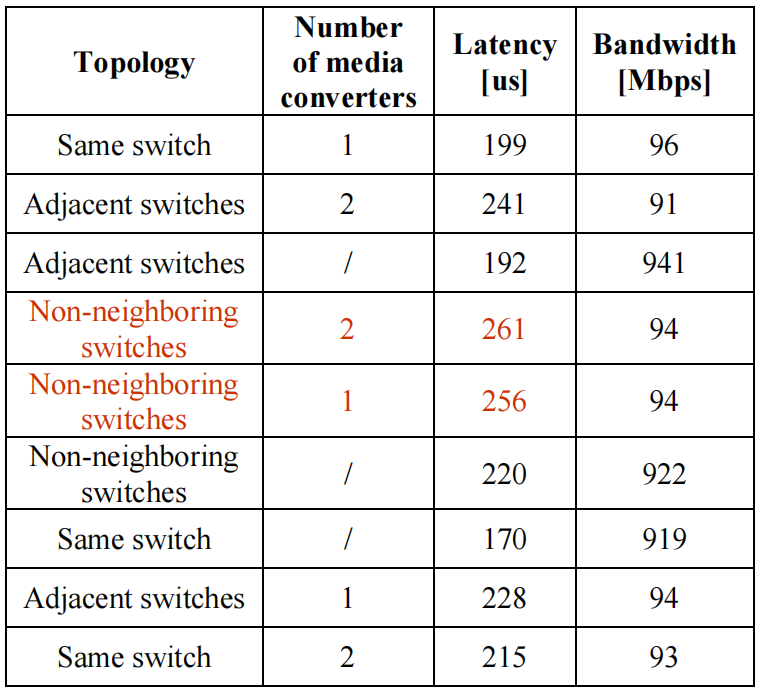
表四 受檢路徑的延遲和帶寬測量值
從結果可以得出結論,無論設備以何種方式排列,該系統都能滿足帶寬要求。但是,如果兩個非相鄰的交換機通過一條包含媒體轉換器的路徑連接,可能無法滿足延遲要求(延遲《250us),所以在這種情況下應格外注意。
為了評估VLAN配置和流量優先級,進行了類似于基本功能測試的試驗。這一次,20000個長度為516個八位字節(插入4字節的802.1Q頭)的幀被雙向傳輸,其中一半是正確的VLAN ID值,一半是錯誤的。觀察到兩個額外的幀計數器類型:通過過濾策略的幀數(InAccepted)和沒有通過過濾的幀數(InFiltered)。從圖4可以看出,在參與幀傳輸的端口上,幀計數器的值是如何根據流量方向正確改變的,而在其他端口上則保持不變。
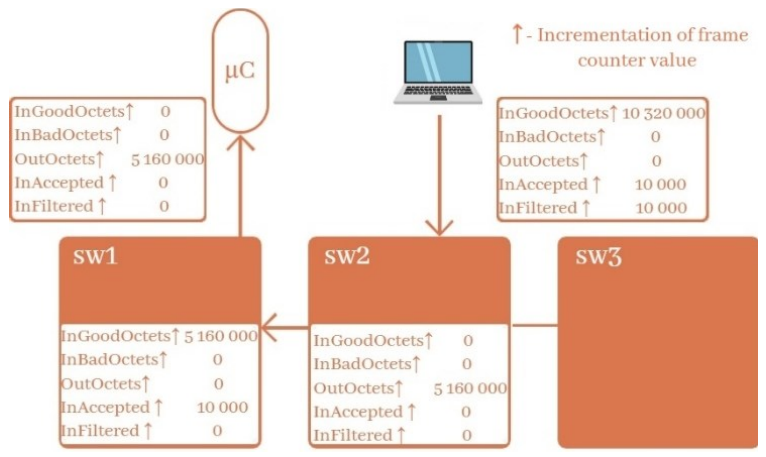
圖4. VLAN幀轉發評估示例
同時,對于接收方的每個場景,通過使用Wireshark對每個幀的優先級進行控制。
V.總結
介紹了自動駕駛汽車域控制器以太網子系統的實現過程。本文清楚地提供了以太網履行其通信骨干角色所需要滿足的需求的概述。對由三個菊花鏈汽車以太網交換機組成的網絡子系統進行了評估,重點是延遲和帶寬問題。公開了從選擇設備和系統結構到滿足數據流要求的整個過程。所有的基本功能都得到了實現和測試,并揭示了確切的限制。
在未來的工作中,將給出實時以太網協議的實現和向系統引入確定性的過程。
審核編輯:郭婷
-
控制器
+關注
關注
112文章
16214瀏覽量
177479 -
以太網
+關注
關注
40文章
5385瀏覽量
171161 -
自動駕駛
+關注
關注
783文章
13694瀏覽量
166166
原文標題:智駕域控的以太網子系統評估
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
全新 Cadence High-Speed Ethernet Controller IP 系列 速度高達 800Gbps 的以太網子系統解決方案,助力實現硅驗證

域控制器是下一代智能汽車架構的關鍵
ZC706上10G以太網子系統的IO位置不對
【WBR3 WiFi&BLE 雙模模組免費試用申請】汽車動力域控制器
請問如何在VC707上構建和測試AXI以太網子系統?
基于以太網的指紋門禁控制器設計與實現
恩智浦的以太網子系統用于批量生產汽車?
恩智浦宣布收購汽車以太網子系統技術供應商OmniPHY
楷登電子推完整以太網子系統解決方案
基于以太網的板載域控制器研究
以太網網關域控制器的硬件實現

汽車區域控制器架構趨勢下的SmartFET應用





 工商網監
工商網監
評論