 現代汽車電子ECU開發流程及使用工具介紹
現代汽車電子ECU開發流程及使用工具介紹
前言
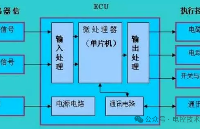
ECU即電子控制單元,從用途上講則是汽車專用微機控制器,和普通電腦一樣,由微處理器(CPU)、存儲器(ROM、RAM)、輸入/輸出接口(I/O)、模數轉換器(A/D)以及整形、驅動等大規模集成電路組成。隨著電動汽車的電子化、智能化、和網絡化程度越來越高,電動汽車的動力性、安全性和環保性得到大幅度提高,電控單元的數量與日俱增,在一些高檔轎車上,往往擁有幾十個甚至上百個ECU,這些ECU通過數字總線結構連接在一起,形成一個復雜的計算機局域網。
現代汽車電子電器系統的開發過程遵循如圖1所示的V型流程,該V型流程不僅適用于ECU(ElectronicControlUnit,電子控制單元)的開發過程,同樣適用于汽車上其他的電子器件甚至部件總成的開發過程。
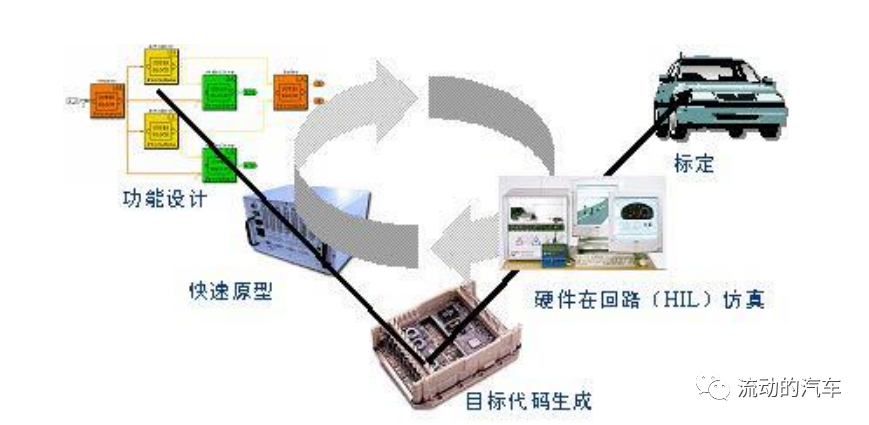
圖1現代汽車電子電器系統的開發流程圖
1. 第一階段
系統開發的第一階段為功能設計與系統仿真測試階段,在該階段首先完成目標產品的功能設計,接著使用仿真手段完成功能的仿真測試工作,該階段的仿真測試被稱為SiL(SoftwareintheLoop,軟件在環仿真)測試,如圖2,即通過仿真模型提供控制邏輯運行過程的環境數據,驗證控制邏輯的輸出結果是否滿足用戶需求描述的要求,該階段實現的是與硬件無關的控制算法的設計。該階段常用的軟件工具為ETAS的ASCET-MD,NI的LabVIEW,Mathworks的Simulink和Stateflow等。通過了SiL測試驗證的控制算法將進入開發的第二階段。
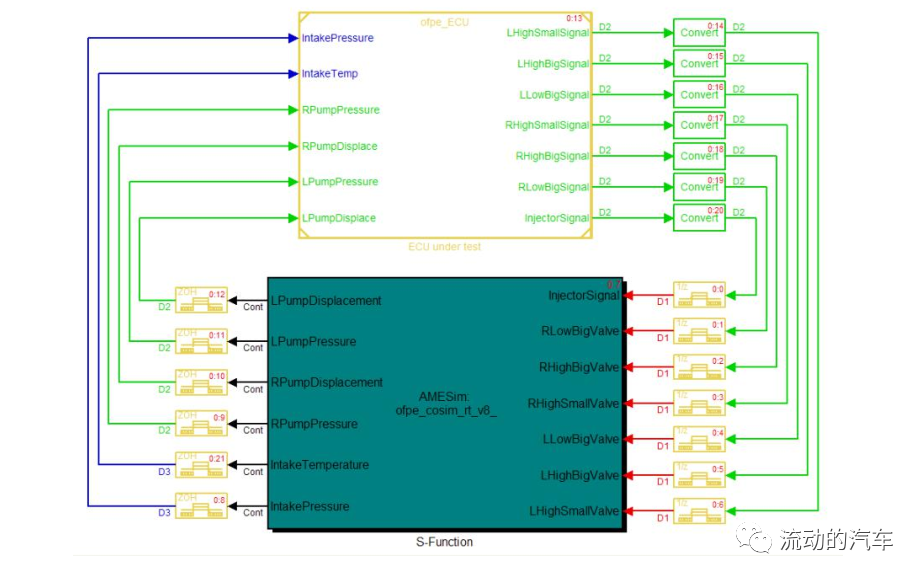
圖2 SiL測試Simulink模型
2. 第二階段
在系統開發的第二階段,將使用RCP(RapidControlPrototyping,快速控制原型)工具,對早期設計出來的控制算法模型進行實時環境下的功能實現,包括實際系統中涉及的各種輸入輸出、軟硬件中斷等實時特性。之后,就可以利用測試管理工具軟件進行各種測試,以檢驗控制方案對實際對象的控制效果,并在線優化控制參數。此時即使控制算法模型需要大規模修改,重新形成測試原型也只需要幾分鐘的時間。這樣在控制方案開發完成之前,即可基本確認最終的方案和實現效果。由于RCP仿真階段處于產品實物開發階段之前,因此通過RCP仿真測試,可以在設計初期發現控制邏輯在實時運行環境下存在的問題,及時修改邏輯或參數,再進行實時測試,這樣反復進行,最終產生一個完全面向用戶需求的合理可行的實時控制算法模型,進入開發的第三階段。這一階段常用的工具包括ETAS的ASCET-RP軟件和ES900硬件,NI的VeriStand軟件和CompactRIO硬件,dSPACE的MicroAutoBox硬件等。
3. 第三階段
在系統開發的第三階段,工程師將完成了RCP仿真測試的實時控制算法模型與針對ECU實物的底層驅動邏輯相結合,生成目標語言程序,并下載到ECU硬件中,從而完成控制邏輯與ECU實物的集成工作。這一階段的ECU產品在軟硬件功能上已經能夠滿足用戶的基本要求,通常廠家將這一階段的產品定義為A樣件,即產品的基本概念實現樣件,該階段樣件主要用于與用戶初步確認需求的完整性和可行性。這一階段常用的工具包括dSPACE的TargetLink軟件,ETAS的ASCET-SE軟件,ECU處理器的目標語言編譯器軟件以及ECU硬件。
4. 第四階段
在系統開發的第四階段,通常完成ECU的HiL(HardwareintheLoop,硬件在環仿真)測試,參與測試的ECU為實物,ECU運行所需的所有外部信號均由HiL設備實時提供,同時HiL設備完成ECU運行工況的實時模擬,如圖3。通過HiL測試,可以在實車測試之前發現ECU運行算法中不合理的邏輯、不匹配的參數,以及ECU不滿足法規要求、不符合電磁兼容標準的問題,進而及時整改算法軟件及ECU硬件,從而縮短產品開發周期、減少產品開發經濟投入、降低實車測試產生風險的概率。此階段的產品通常被定義為B樣件,即具備一定功能的樣件,用來進行各方面參數調整以與整車的性能相匹配。完成各項功能的HiL測試后的ECU將進入實車測試階段。這一階段常用的工具包括dSPACE的ControlDesk軟件,Simulator及SCALEXIO硬件,ETAS的LABCAROPERATOR軟件,LABCAR及ES1000硬件等。在實車測試階段,將完成控制算法中所有與車輛實際運行相關的控制參數的標定和匹配測試,還將完成各種車輛實際運行環境下的測試,例如在高溫、高寒、高海拔等環境下的測試,同時還將完成ECU產品的FMEA(FailureModeandEffectsAnalysis,潛在失效模式及后果分析)工作,通過FMEA,可以最大限度地在生產前發現產品潛在的質量問題并提出解決方案,從而在產品批量生產前完成質量改善。此階段的產品通常被定義為C樣件,即用于進行設計最終確認的產品樣件。這一階段常用的工具包括dSPACE的EIM軟件,DCIGSIs硬件,ETAS的INCA軟件,ETK硬件,以及滿足ASAMMCD標準的總線通訊工具,如Vector的CANoe軟件和CANcase硬件等。
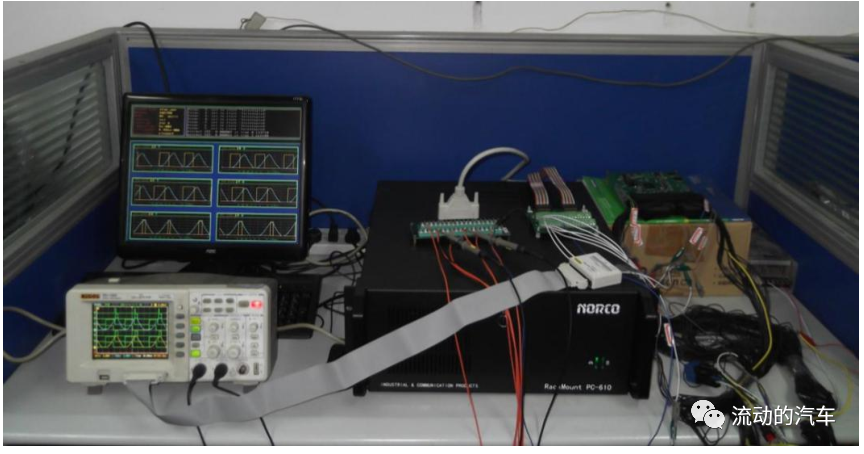
圖 3HiL測試
5. 總結
以上為一個ECU產品的開發過程概述,通過上述介紹可以了解,目前的ECU開發過程不僅在宏觀上遵循V型流程,在微觀上也滿足V型流程,即每個開發過程不僅包含了功能的開發,而且包含了相應功能的測試。得益于高效的產品開發流程以及精準的開發和測試工具,汽車電子產品的開發周期正在逐年縮短,汽車電子產品的質量要求卻在逐漸提升。
審核編輯:郭婷
-
汽車電子
+關注
關注
3024文章
7868瀏覽量
166497 -
存儲器
+關注
關注
38文章
7452瀏覽量
163602 -
ecu
+關注
關注
14文章
881瀏覽量
54404
原文標題:汽車ECU開發流程及使用工具介紹
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
Kali Linux常用工具介紹
ECU調校對汽車性能的影響
同星ECU診斷與刷寫解決方案:降低了開發ECU刷寫軟件的難度!

ECU電控軟件開發及測試介紹
電子控制單元(ecu)的作用有哪些?它是如何工作的?

ECU和汽車處理架構:虛擬化和軟件定義汽車
ECU刷寫流程之壓縮刷寫技術解析

HarmonyOS開發案例:【生活健康app之編寫通用工具類】(5)





 工商網監
工商網監
評論