") 改寫俄烏戰(zhàn)爭?無人機(jī),一個飛行的傳感器集群
改寫俄烏戰(zhàn)爭?無人機(jī),一個飛行的傳感器集群
2月24日,俄羅斯突襲烏克蘭,我們見證了歷史:俄烏戰(zhàn)爭打響了。
到10月24日,俄烏戰(zhàn)爭已經(jīng)打了足足8個月。
期間風(fēng)起云涌,各種高科技武器層出不窮,除了高精制導(dǎo)武器,現(xiàn)在媒體出現(xiàn)最多的字眼是:無人機(jī),一個飛行的傳感器集群。
獲取更多傳感器行業(yè)深度資訊、報告,了解傳感器技術(shù)、傳感器與測試技術(shù)、物聯(lián)網(wǎng)傳感器技術(shù)……等傳感器知識,請關(guān)注傳感器專家,查看往期內(nèi)容。
傳感器專家網(wǎng)專注于傳感器技術(shù)領(lǐng)域,致力于對全球前沿市場動態(tài)、技術(shù)趨勢與產(chǎn)品選型進(jìn)行專業(yè)垂直的服務(wù),是國內(nèi)領(lǐng)先的傳感器產(chǎn)品查詢與媒體信息服務(wù)平臺。基于傳感器產(chǎn)品與技術(shù),對廣大電子制造從業(yè)者與傳感器制造者提供精準(zhǔn)的匹配與對接。
世界上“首次”無人機(jī)戰(zhàn)爭:中國成背后贏家
近日,美國著名軍事媒體TheDrive的Warzone欄目中,發(fā)布了一篇“標(biāo)題黨”文章:《人類歷史上第一次無人機(jī)空戰(zhàn)完成了》,文章中的視屏被上傳到社交媒體上,引起廣泛熱議。

據(jù)文章介紹,該視頻拍攝于頓巴斯地區(qū)頓涅茨克上空。
畫面顯示一架由烏克蘭軍隊(duì)控制的大疆四旋翼無人機(jī)在鏡頭中發(fā)現(xiàn)不遠(yuǎn)處懸停著一架由俄羅斯方面控制的另一架大疆無人機(jī),隨后俄方無人機(jī)向?yàn)醴綗o人機(jī)移動,似乎要主動碰撞,結(jié)果在碰撞時俄方無人機(jī)損壞了一個螺旋槳葉片,然后墜毀。
因此,TheDrive網(wǎng)站戲稱這是人類歷史上首次無人機(jī)戰(zhàn)爭:一架無人機(jī)試圖擊落另一架無人機(jī)。顯然,如果這也算“空戰(zhàn)”的話,層次也確實(shí)太低了一些。實(shí)際上,各國設(shè)想的無人機(jī)空戰(zhàn),應(yīng)該是一方無人機(jī)發(fā)射導(dǎo)彈,或者使用機(jī)炮,擊落另一方的無人機(jī)。
但毫無疑問,隨著這場戰(zhàn)爭的發(fā)展,無人機(jī)已經(jīng)成為“明星”武器,越來越多地出現(xiàn)在俄烏戰(zhàn)爭中。俄烏戰(zhàn)爭的下半場,已經(jīng)進(jìn)入到以無人機(jī)為主導(dǎo)的交鋒中。

無人機(jī):一個飛行的傳感器集群
無人機(jī)的形態(tài)多種多樣,我們一般所見的,軍用無人機(jī)以固定翼無人機(jī)為主,載重、航程較大。民用無人機(jī)則以多旋翼無人機(jī)為主,主要是四旋翼。
此外還有無人直升機(jī)、垂直起降固定翼無人機(jī)等。本文主要討論民用旋翼無人機(jī)。

為什么說無人機(jī)是飛行的傳感器集群?
因?yàn)樵谝患軣o人機(jī)里,你找不到比各種傳感器更多、更重要的器件!
飛行控制系統(tǒng)(簡稱“飛控”)是無人機(jī)最核心的技術(shù),是無人機(jī)完成起飛、空中飛行、執(zhí)行任務(wù)和返場回收等整個飛行過程的核心系統(tǒng),也是無人機(jī)區(qū)別于一般航模(飛行玩具)的最主要標(biāo)志。
簡單點(diǎn)說,飛控就是無人機(jī)的大腦,無人機(jī)的飛行、懸停,姿態(tài)變化等等都是由多種傳感器將飛行器本身的姿態(tài)數(shù)據(jù)傳回飛控,再由飛控通過運(yùn)算和判斷下達(dá)指令,由執(zhí)行機(jī)構(gòu)完成動作和飛行姿態(tài)調(diào)整。
這就類似于人體的大腦,對身體各個部位發(fā)送指令,并且接收各部件傳回的信息,運(yùn)算后發(fā)出新的指令。例如,大腦指揮手去拿一杯水,手觸碰到杯壁后,因?yàn)樗珷C而縮回,并且將此信息傳回給大腦,大腦會根據(jù)實(shí)際情況重新發(fā)送新的指令。
飛控系統(tǒng)由傳感器、機(jī)載計(jì)算機(jī)和伺服作動設(shè)備三大部分組成,其中,傳感器是使用最多的器件。
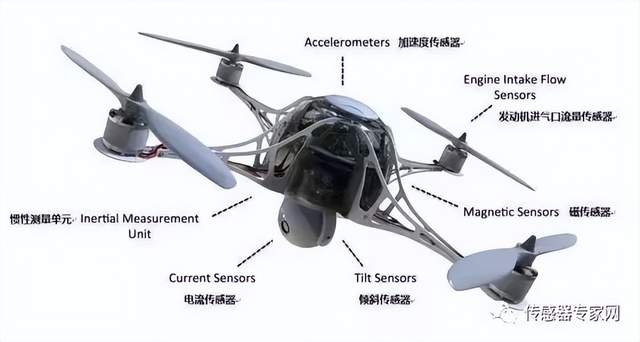
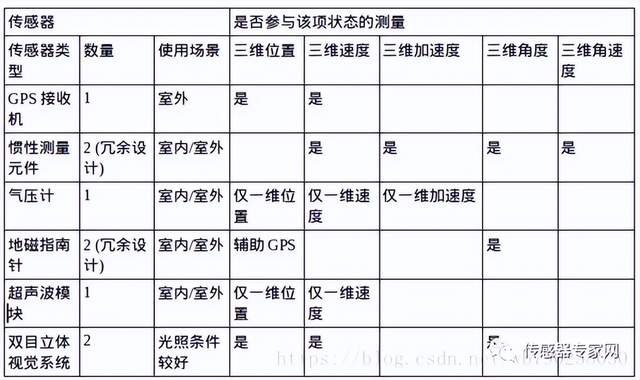
一架無人機(jī)要平穩(wěn)地飛行,至少需要持續(xù)測量15個狀態(tài)量,包括:三維位置、三維速度、三維加速度、三軸角度和三軸角速度等。
一架無人機(jī)至少需要用到包括慣性測量單元(IMU)、GPS、氣壓計(jì)、地磁指南針(磁羅盤)、超聲波傳感器、雙目視覺感知等傳感器,此外還有激光雷達(dá)、傾斜傳感器、電流傳感器、各向異性磁阻(AMR)傳感器、發(fā)動機(jī)進(jìn)氣流量傳感器、位置傳感器和一些溫度傳感器等等在各種無人機(jī)有所應(yīng)用。
可以說,一架無人機(jī)除了外殼,內(nèi)里幾乎都是由各種傳感器組成的!
各種傳感器在無人機(jī)中的應(yīng)用
各種傳感器在無人機(jī)中有什么應(yīng)用?這是我們所好奇的。
慣性測量單元(IMU)
首先我們來說慣性測量單元(IMU),這是無人機(jī)最核心的傳感器之一。有沒有想過一架無人機(jī)在空中怎么保持平衡?不會搖搖晃晃、忽上忽下?沒錯,這就是IMU的作用。
IMU是一個傳感器模塊,包含不止一種傳感器。一般的,一個IMU內(nèi)會裝有三軸的陀螺儀和三個方向的加速度計(jì),來測量物體在三維空間中的角速度和加速度,并以此解算出物體的姿態(tài)。
為了提高可靠性,還可以為每個軸配備更多的傳感器。一般而言IMU安裝在無人機(jī)的重心上。

加速度計(jì)
加速度計(jì)是用來提供無人機(jī)在XYZ三軸方向所承受的加速力,它以g為單位測量加速度,決定無人機(jī)在靜止?fàn)顟B(tài)時的傾斜角度。
如果加速度計(jì)不受任何外部加速度的影響,則無人機(jī)將僅測量相對地球的加速度,即重力。假設(shè)3軸加速度計(jì)的放置方式是X軸上的傳感器指向左側(cè),Y軸上的傳感器向下,Z軸上的傳感器向前且不受任何力的影響,則加速度計(jì)將返回以下值:X = 0 g, Y = 1 g, Z = 0 g。如果將同一加速度計(jì)向左偏轉(zhuǎn),則其讀數(shù)將顯示:X = 1 g, Y = 0 g, Z = 0 g。同樣,當(dāng)向右傾斜時,X平面將返回X = -1 g。
給定的加速度測量相關(guān)性,由監(jiān)控加速度計(jì)工作的系統(tǒng)算法來實(shí)現(xiàn)。
陀螺儀
陀螺儀傳感器能監(jiān)測三軸的角速度,因此可監(jiān)測出俯仰(pitch)、翻滾(roll)和偏擺(yaw)時角度的變化率。即使是一般飛行器,陀螺儀都是相當(dāng)重要的傳感器。
角度信息的變化能用來維持無人機(jī)穩(wěn)定并防止晃動。由陀螺儀所提供的信息將匯入馬達(dá)控制驅(qū)動器,通過動態(tài)控制馬達(dá)速度,并提供馬達(dá)穩(wěn)定度。陀螺儀還能確保無人機(jī)根據(jù)用戶控制裝置所設(shè)定的角度旋轉(zhuǎn)
除了在無人機(jī)上,IMU大多用在需要進(jìn)行運(yùn)動控制的設(shè)備,以及需要用姿態(tài)進(jìn)行精密位移推算的場合,如如汽車機(jī)、器人、潛艇、飛機(jī)、導(dǎo)彈和航天器等等都能找到IMU。
地磁指南針(磁羅盤)
顧名思義,地磁指南針(磁羅盤)就是為無人機(jī)指明方向的傳感器,其原理與我們的指南針是一樣的,都是根據(jù)地磁效應(yīng)來指明方向。
不同的是古時的指南針是很大一個的機(jī)械裝置,現(xiàn)在的無人機(jī)上的磁傳感器都是基于MEMS技術(shù),通過各向異性磁性電阻材料,感受到微弱的磁場變化時會導(dǎo)致自身電阻產(chǎn)生變化來感應(yīng)方向。
一般來說,磁羅盤數(shù)據(jù)還需要加速度計(jì)提供傾斜角度數(shù)據(jù)以補(bǔ)強(qiáng)信息。有了傾斜數(shù)據(jù)加上磁性數(shù)據(jù),就能計(jì)算出正確方位。
同時,磁傳感器容易受到四周磁體和鐵的影響,因此可以用來偵測四周的情況,例如電極、電線、車輛、其他無人機(jī)等等,以避免事故發(fā)生。
氣壓計(jì)
氣壓計(jì)運(yùn)作的原理,就是利用大氣壓力換算出高度。壓力傳感器能偵測地球的大氣壓力。由氣壓計(jì)所提供的數(shù)據(jù)能協(xié)助無人機(jī)導(dǎo)航,上升到所需的高度。準(zhǔn)確估計(jì)上升與下降速度,對無人機(jī)飛行控制來說相當(dāng)重要。
超聲波傳感器
無人機(jī)采用超聲波傳感器就是利用超聲波碰到其他物質(zhì)會反彈這一特性,進(jìn)行高度控制。前面就提到過近地面的時候,利用氣壓傳感器是無法應(yīng)對的。但是利用超聲波傳感器在近地面就能夠?qū)崿F(xiàn)高度控制。這樣一來氣壓傳感器同超聲波傳感器一結(jié)合,就可以實(shí)現(xiàn)無人機(jī)無論是在高空還是低空都能夠平穩(wěn)飛行。
GPS(GNSS)
GPS,或者準(zhǔn)確的說是“衛(wèi)星導(dǎo)航系統(tǒng)”,只是因?yàn)槊绹俗钤玳_發(fā)出了GPS導(dǎo)航系統(tǒng)并且沿用至今,成為全球使用最多的衛(wèi)星導(dǎo)航系統(tǒng),因此很多時候我們以GPS代稱,我國的北斗系統(tǒng)也是其中一種衛(wèi)星導(dǎo)航系統(tǒng),目前許多衛(wèi)星導(dǎo)航芯片都已支持GPS、北斗等多模導(dǎo)航。
GPS的原理即使通過衛(wèi)星協(xié)助進(jìn)行定位、導(dǎo)航,但無人機(jī)運(yùn)動情況復(fù)雜,容易受到建筑物與磁場的影響,存在接收不到GPS的情況,因此常需要與IMU等傳感器數(shù)據(jù)融合計(jì)算,通過算法以盡可能準(zhǔn)確地獲得無人機(jī)的位置信息。
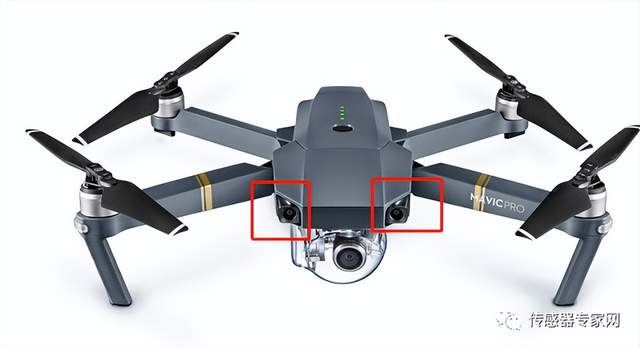
雙目立體視覺感知系統(tǒng)
隨著無人機(jī)的發(fā)展日益成熟,近幾年,雙目立體視覺感知系統(tǒng)已經(jīng)成為無人機(jī)的標(biāo)配。
雙目功能可以讓無人機(jī)在飛行過程中較好的識別周圍環(huán)境,有利于避障和飛行,無人系統(tǒng)領(lǐng)域?qū)υ摴δ艿氖袌鲂枨蠓浅4蟆?/p>
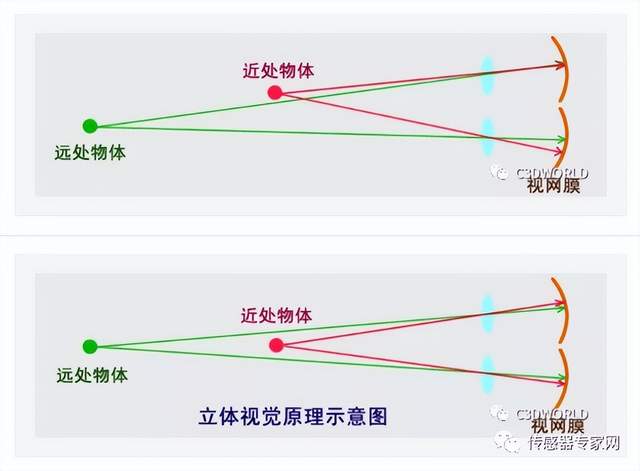
雙目立體視覺(Binocular Stereo Vision)是機(jī)器視覺的一種重要形式,它是基于視差原理并利用成像設(shè)備從不同的位置獲取被測物體的兩幅圖像,通過計(jì)算圖像對應(yīng)點(diǎn)間的位置偏差,來獲取物體三維幾何信息的方法。
融合兩只眼睛獲得的圖像并觀察它們之間的差別(視差圖像),使我們可以獲得明顯的深度感,建立特征間的對應(yīng)關(guān)系,將同一空間物理點(diǎn)在不同圖像中的映像點(diǎn)對應(yīng)起來。
簡單點(diǎn)說,就是利用兩個攝像頭來模擬出人的雙眼效果,從而判斷出目標(biāo)三維信息,達(dá)到有效避障的目的。
以上這幾種傳感器可以說是無人機(jī)的核心傳感器,缺少這些傳感器,無人機(jī)的飛行功能很可能無法保證。
除此之外,還有許多特定傳感器用在無人機(jī)的各種特別需求中。
譬如激光雷達(dá),激光雷達(dá)是一種發(fā)射激光束探測目標(biāo)的位置、速度等特征量的雷達(dá)系統(tǒng),無人機(jī)通過搭載激光雷達(dá),可以進(jìn)行精確測繪,能夠更好的服務(wù)于電力巡線、林業(yè)調(diào)查、帶狀測圖等應(yīng)用。
還有MEMS麥克風(fēng),是一種能將聲音頻號轉(zhuǎn)換為電子訊號的音頻傳感器。MEMS麥克風(fēng)正逐漸取代傳統(tǒng)麥克風(fēng),因?yàn)樗鼈兡芴峁└叩挠嵲氡?SNR)、更小的外型尺寸、更好的射頻抗擾性,面對震動時也更加穩(wěn)健。這類傳感器可用在無人機(jī)的影片拍攝、監(jiān)控、間諜行動等應(yīng)用。
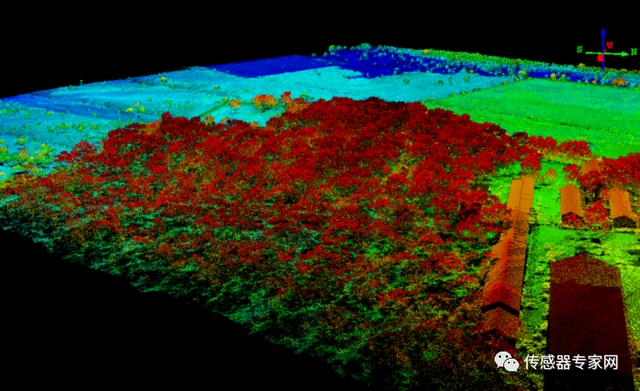
▲無人機(jī)搭載激光雷達(dá)進(jìn)行測繪效果
消費(fèi)級無人機(jī):我國高科技產(chǎn)業(yè)少有的亮點(diǎn)
集成了數(shù)量眾多的各式傳感器的無人機(jī),是我國高科技產(chǎn)業(yè)少有的亮點(diǎn),有數(shù)據(jù)顯示,在全球消費(fèi)級(民用)無人機(jī)市場,我國大疆公司占據(jù)了超過70%的市場份額,所有中國民用無人機(jī)廠商占據(jù)全球超過80%市場份額。
這世界只有兩種無人機(jī),一種叫大疆,一種叫其它!

2020年12月18日,美國商務(wù)部以“違反美國國家安全” 為由,宣布將大疆公司列入所謂出口管制“實(shí)體清單”。
一家企業(yè)被列入美方“實(shí)體清單”,意味著這些企業(yè)要從美國供應(yīng)商那里接收貨品時,必須從美國商務(wù)部申請?jiān)S可證,這個過程將面臨嚴(yán)格審查。但被列入“實(shí)體清單”的企業(yè)并不被禁止在美國銷售產(chǎn)品。
因此即使大疆被列入美國的“實(shí)體清單”,但憑借過硬的技術(shù)和產(chǎn)品實(shí)力,大疆的無人機(jī)產(chǎn)品在美國市場仍然大賣!
甚至在美國政府提高對大疆等中國公司的關(guān)稅后,大疆對旗下無人機(jī)大幅提高售價,市場份額一度沖破80%,因?yàn)樵S多美國人趕在關(guān)稅提高前大量購買大疆無人機(jī)。
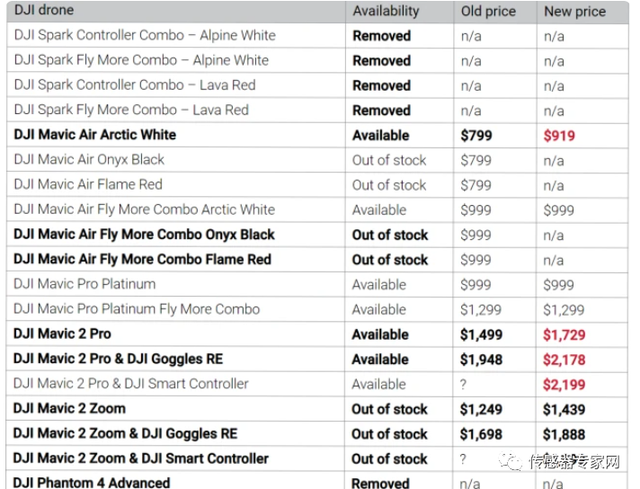
▲大疆此前在美產(chǎn)品售價調(diào)整清單(部分)
結(jié)語
為什么消費(fèi)級無人機(jī)能夠誕生?
這是因?yàn)閭鞲衅鳌⑿酒燃夹g(shù)進(jìn)步,尤其是MEMS技術(shù)的應(yīng)用,能夠?qū)⒁郧昂艽蟮臋C(jī)械傳感器做小,并且大大降低功耗,因此無人機(jī)、手機(jī)等智能設(shè)備的應(yīng)用才成為了可能。
以傳感器等“硬科技”組成的基礎(chǔ),才是無人機(jī)、手機(jī)等應(yīng)用設(shè)備生長的沃土。
無人機(jī)等智能設(shè)備帶給普通人,能看見這個星球上不一樣的美好。但同樣,在不同使用者手中,無人機(jī)也發(fā)揮著冰冷的作用。
希望科技進(jìn)步,是用在更好的生活。
您對本文有什么看法?歡迎留言分享!
順手轉(zhuǎn)發(fā),將中國傳感產(chǎn)業(yè)動態(tài)傳遞給更多人了解!
聲明:本文內(nèi)容系作者個人觀點(diǎn),不代表傳感器專家網(wǎng)觀點(diǎn)或立場。更多觀點(diǎn),歡迎大家留言評論。
審核編輯 黃昊宇
-
傳感器
+關(guān)注
關(guān)注
2548文章
50678瀏覽量
752006 -
無人機(jī)
+關(guān)注
關(guān)注
228文章
10340瀏覽量
179626
發(fā)布評論請先 登錄
相關(guān)推薦
無人機(jī)空速計(jì)方案 空速傳感器選型推薦
DIY了一臺無人機(jī),用全志T113芯片
開源項(xiàng)目!DIY了一臺無人機(jī),用全志T113芯片
開源項(xiàng)目!用ESP8266 DIY會爬墻的無人機(jī)

北極芯微dToF傳感器大規(guī)模量產(chǎn)交付無人機(jī)市場
無人機(jī)與反無人機(jī):高空中的智慧較量和“貓鼠游戲”|特信無人機(jī)反制
如何利用無人機(jī)物聯(lián)卡實(shí)現(xiàn)無人駕駛飛行
第四集 知語云智能科技無人機(jī)反制技術(shù)與應(yīng)用--無人機(jī)的組成與工作原理
第二集 知語云智能科技無人機(jī)反制技術(shù)與應(yīng)用--無人機(jī)的發(fā)展歷程
第一集 知語科技無人機(jī)反制技術(shù)與應(yīng)用--無人機(jī)的定義與分類
無人機(jī)+紅外熱成像技術(shù)優(yōu)勢

無人機(jī)全景監(jiān)測:空域管理的新革命
四旋翼無人機(jī)飛行原理【其利天下無人機(jī)方案開發(fā)】






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論