") 一種FLL輔助PLL的GNSS接收機(jī)矢量跟蹤環(huán)路
一種FLL輔助PLL的GNSS接收機(jī)矢量跟蹤環(huán)路
摘要:全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)接收機(jī)的設(shè)計(jì)主要包括捕獲、跟蹤、解算三個(gè)環(huán)節(jié),其中,跟蹤環(huán)節(jié)中載波頻率和碼頻率的穩(wěn)定性直接影響著導(dǎo)航定位性能。為改善動(dòng)態(tài)環(huán)境中載波頻率和碼頻率的波動(dòng)性,提高定位精度,提出一種頻率鎖定環(huán)路(FLL)輔助相位鎖定環(huán)路(PLL)的 GNSS 矢量跟蹤環(huán)路結(jié)構(gòu)。在載波環(huán)中,采用二階 FLL 輔助三階 PLL 的跟蹤方法,通過預(yù)測載波相位、載波頻率、載波頻率率,更新載波相位值并反饋到載波 NCO,實(shí)現(xiàn)載波穩(wěn)定跟蹤;在碼環(huán)中,將解算環(huán)節(jié)獲取的偽距信息反饋到跟蹤環(huán)節(jié),實(shí)時(shí)更新各跟蹤通道的碼頻率,實(shí)現(xiàn)碼環(huán)穩(wěn)定跟蹤。實(shí)驗(yàn)結(jié)果表明,相較于傳統(tǒng)的標(biāo)量跟蹤方法,所提出的 FLL 輔助 PLL 的矢量跟蹤方法能夠在動(dòng)態(tài)環(huán)境下輸出較小的載波頻率和碼頻率誤差,且具有更高的定位精度。相較于其他的環(huán)路改進(jìn)算法,該方法融合了載波改進(jìn)技術(shù)與矢量跟蹤技術(shù),且利用真實(shí)衛(wèi)星數(shù)據(jù)驗(yàn)證了所提方法的定位效果。
0 引 言
全 球 導(dǎo) 航 衛(wèi) 星 系 統(tǒng)(Global Navigation SatelliteSystem,GNSS)已廣泛應(yīng)用于軍事和民用領(lǐng)域,成為最受用戶歡迎的導(dǎo)航方法之一。GNSS接收機(jī)設(shè)計(jì)主要包括捕獲、跟蹤、解算三個(gè)環(huán)節(jié),跟蹤環(huán)節(jié)逐步精細(xì)估計(jì)載波頻率和碼相位值,獲取偽距、偽距率信息,在解算環(huán)節(jié)結(jié)合衛(wèi)星位置解算出接收機(jī)位置、速度、時(shí)間信息。傳統(tǒng)的 GNSS 跟蹤環(huán)路是借助載波跟蹤環(huán)路(簡稱載波環(huán))和碼跟蹤環(huán)路(簡稱碼環(huán))完成的,其中碼環(huán)實(shí)現(xiàn)形式通常表現(xiàn)為延遲鎖定環(huán)路(DLL),而載波環(huán)通常有相位鎖定環(huán)路(PLL)和頻率鎖定環(huán)路(FLL)兩種。然而,動(dòng)態(tài)環(huán)境中的 GNSS 環(huán)路跟蹤存在載波頻率和碼頻率波動(dòng)問題,大幅度的頻率波動(dòng)會(huì)影響跟蹤性能,從而直接影響導(dǎo)航定位效果。
GNSS 環(huán)路濾波器以比例積分濾波(PIF)為主[1?2],其利用載波相位差或載波頻率差,結(jié)合環(huán)路濾波參數(shù)及相干積分時(shí)間確定當(dāng)前時(shí)刻最佳相位或頻率,從而完成環(huán)路跟蹤。GNSS環(huán)路跟蹤精度主要受熱噪聲和動(dòng)態(tài)應(yīng)力誤差兩部分因素影響,相較于 PLL,F(xiàn)LL 能更加魯棒地容忍用戶的動(dòng)態(tài)應(yīng)力,能跟蹤信噪比更低的信號(hào),然而,F(xiàn)LL 輸出的載波相位測量值不夠精確,并且數(shù)據(jù)解調(diào)過程中發(fā)生的比特錯(cuò)誤率更高[3?4]。綜合考慮到 PLL 與FLL 優(yōu)缺點(diǎn),文獻(xiàn)[5]將 FLL 與 PLL 結(jié)合起來,以 FLL 輔助 PLL 的方式估計(jì)載波頻率,經(jīng)過穩(wěn)定狀態(tài)下的功率譜分析、均值及方差比較,結(jié)果表明 FLL 輔助 PLL 的環(huán)路跟蹤方式能在環(huán)路噪聲與載體動(dòng)態(tài)性之間做出平衡,從而優(yōu)化環(huán)路跟蹤性能。但缺點(diǎn)是載體運(yùn)動(dòng)參數(shù)需要根據(jù)接收機(jī)所處環(huán)境的信噪比、動(dòng)態(tài)應(yīng)力情況預(yù)先調(diào)整,這制約了該環(huán)路結(jié)構(gòu)在實(shí)時(shí)場景下的應(yīng)用。為了充分利用跟蹤環(huán)節(jié)中的環(huán)路狀態(tài)量,更具有普遍適應(yīng)性的矢量跟蹤(Vector Tracking,VT)[6]被提出。
不同于傳統(tǒng)的標(biāo)量跟蹤,VT 結(jié)構(gòu)將 GNSS跟蹤環(huán)節(jié)和解算環(huán)節(jié)緊密相連,利用載波頻率差、碼相位差,計(jì)算偽距差、偽距率差,通過導(dǎo)航濾波更新導(dǎo)航結(jié)果,并將導(dǎo)航結(jié)果送入跟蹤環(huán)路,實(shí)現(xiàn)所有通道之間的信息共享。矢量跟蹤結(jié)構(gòu)自提出以來,經(jīng)過不斷發(fā)展,文獻(xiàn)[7]以 VT為基礎(chǔ),將載波環(huán)輸出的多普勒頻移信息和碼環(huán)輸出的碼相位信息送入導(dǎo)航濾波器進(jìn)行導(dǎo)航解算,并利用解算環(huán)節(jié)的偽距信息實(shí)時(shí)更新碼頻率,輔助環(huán)路跟蹤。但其載波環(huán) 路 實(shí) 現(xiàn) 形 式 仍 然 是 單 一 的 PIF 環(huán) 路 ,動(dòng) 態(tài) 環(huán) 境 中GNSS 載波相位或頻率測量值精度低,易造成環(huán)路失鎖并影響定位結(jié)果。
為改善動(dòng)態(tài)環(huán)境中載波頻率和碼頻率的波動(dòng)問題,提高定位精度,本文提出一種 FLL 輔助 PLL 的 GNSS 矢量跟蹤結(jié)構(gòu)。首先確定導(dǎo)航跟蹤與導(dǎo)航解算的系統(tǒng)模型,包括 FLL 輔助 PLL 的載波跟蹤環(huán)路結(jié)構(gòu)設(shè)計(jì)、矢量碼環(huán)結(jié)構(gòu)設(shè)計(jì)和導(dǎo)航解算部分的卡爾曼濾波(KF)狀態(tài)模型和量測模型。實(shí)驗(yàn)結(jié)果表明,相較于傳統(tǒng)的標(biāo)量跟蹤方法,本文所提出的 FLL 輔助 PLL 的矢量跟蹤方法能夠在動(dòng)態(tài)環(huán)境下輸出較小的載波頻率和碼頻率誤差,且具有更高的定位精度。
1 標(biāo)量跟蹤結(jié)構(gòu)
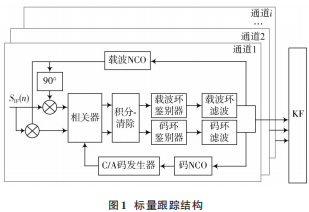
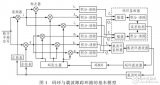
傳統(tǒng)的標(biāo)量跟蹤結(jié)構(gòu)如圖 1 所示。接收的射頻信號(hào)經(jīng)過降頻量化后,轉(zhuǎn)化為數(shù)字中頻信號(hào) SIF ( n )。每個(gè)通道的數(shù)字中頻信號(hào)首先與本地載波振蕩器復(fù)制的載波信號(hào)(包括同相支路 I 和反相支路 Q)進(jìn)行混頻,然后與本地碼發(fā)生器復(fù)制的超前(Early)、即時(shí)(Prompt)、滯后(Late)碼信號(hào)進(jìn)行相關(guān),經(jīng)積分?清除后得到相干積分結(jié)果。環(huán)路鑒別器根據(jù) 6 個(gè)相干積分結(jié)果可以估算出載波相位差和碼相位差,并由環(huán)路濾波后作為載波數(shù)控振蕩器(NCO)和碼 NCO 的控制輸入。標(biāo)量跟蹤結(jié)構(gòu)的碼環(huán)為 DLL,載波環(huán)為 PLL 或 FLL。如圖 1 所示,每個(gè)跟蹤通道之間相互獨(dú)立,偽距差、偽距率差被送入導(dǎo)航解算部分,通過 KF實(shí)現(xiàn)導(dǎo)航信息解算[8]。
2 矢量跟蹤結(jié)構(gòu)
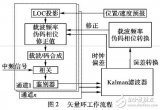
本文提出的FLL輔助PLL的矢量跟蹤結(jié)構(gòu)如圖2所示。
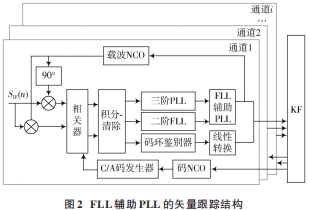
載波環(huán)部分通過 FLL 輔助 PLL 的形式更新載波相位值,控制載波 NCO 的輸入從而保持環(huán)路鎖定。其中,PLL 采用三階環(huán)路濾波,F(xiàn)LL 采用二階環(huán)路濾波。碼環(huán)矢量結(jié)構(gòu)以 KF 為導(dǎo)航處理器,將導(dǎo)航解算部分的偽距信息反饋到碼 NCO,調(diào)整各跟蹤通道的碼頻率,以此跟蹤 GPS 偽碼信號(hào)并實(shí)現(xiàn)所有通道的信息共享。對于導(dǎo)航濾波器,除碼環(huán)輸出的碼相位信息外,載波環(huán)濾波輸出的多普勒頻移信息也送入 KF 中,計(jì)算接收機(jī)位置、速度、時(shí)間信息。
2.1 載波環(huán)結(jié)構(gòu)設(shè)計(jì)
載波環(huán)結(jié)構(gòu)設(shè)計(jì)包括三階 PLL 設(shè)計(jì)、二階 FLL 設(shè)計(jì)和 FLL輔助 PLL設(shè)計(jì)共三部分。PLL和 FLL設(shè)計(jì)均采用PIF 形式,分別更新環(huán)路狀態(tài)量,最后通過線性組合獲得載波相位值從而控制載波 NCO 輸入。
2.1.1 三階 PLL設(shè)計(jì)
PLL 是以鎖定輸入信號(hào)載波相位為目標(biāo)的一種載波環(huán)實(shí)現(xiàn)方式。基于 PIF 的三階 PLL 通過預(yù)測載波相位、載波角頻率和載波角頻率率(載波角頻率的變化率)實(shí)現(xiàn)載波信號(hào)的跟蹤鎖定。
載波相位鑒別器鑒別 k時(shí)刻的載波相位差[9?10]Δθk:

式中:IP, k 和 QP, k 分別表示 k 時(shí)刻即時(shí)同相支路和正交支路的相干積分值。
三階 PLL 結(jié)合當(dāng)前時(shí)刻的狀態(tài)量 xk,計(jì)算下一時(shí)刻的狀態(tài)量[1]xk + 1:
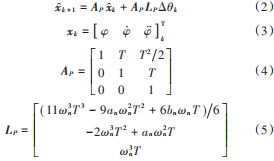
式中:xk 表示環(huán)路狀態(tài)量,它包括載波相位 φ、載波角頻率 φ? 和載波角頻率率 φ;T 為相鄰時(shí)刻時(shí)間間隔;ωn 為環(huán)路特征頻率;an , bn為濾波參數(shù)。
2.1.2 二階 FLL設(shè)計(jì)
FLL 是以鎖定輸入信號(hào)載波頻率為目標(biāo)的一種載波環(huán)實(shí)現(xiàn)方式。基于 PIF 的二階 FLL 通過預(yù)測載波頻率和載波頻率率(載波頻率的變化率)實(shí)現(xiàn)載波信號(hào)的跟蹤鎖定。
載波頻率鑒別器鑒別 k - 1 和 k 兩相鄰時(shí)刻的角頻率差 Δ?k:

二階 FLL 結(jié)合當(dāng)前時(shí)刻的狀態(tài)量 xk,計(jì)算下一時(shí)刻的狀態(tài)量[1]xk + 1:
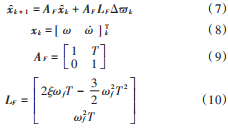
式中:xk 表示環(huán)路狀態(tài)量,它包括載波角頻率 ω 和載波角頻率率ω;ωf為環(huán)路特征頻率;ξ為阻尼系數(shù)。
2.1.3 FLL
輔助PLL設(shè)計(jì)k時(shí)刻三階 PLL參與反饋到載波 NCO 的值[11]為:

k時(shí)刻二階 FLL參與反饋到載波 NCO 的值[12]為:

通過線性組合,得到最終反饋到載波 NCO 的載波相位 θNCO, k為:

通過更新的載波相位值,反饋到載波 NCO 復(fù)制出本地載波信號(hào),與輸入信號(hào)混頻實(shí)現(xiàn)載波穩(wěn)定跟蹤。
2.2矢量跟蹤環(huán)設(shè)計(jì)
碼相位鑒別器鑒別接收碼和復(fù)制碼之間的碼相位差[13?14]Δτk:

式中:
碼相位差 Δτk經(jīng)線性轉(zhuǎn)換得到偽距誤差 Δρ:

式中:fcode為衛(wèi)星信號(hào)被發(fā)射時(shí)的碼頻率,其值為1.023MHz。
利用KF 計(jì)算當(dāng)前時(shí)刻接收機(jī)的位置pr, k、接收機(jī)鐘差Δb,結(jié)合星歷解算出的衛(wèi)星位置ps、衛(wèi)星時(shí)鐘鐘差Δbs、電離層延時(shí)I、對流層延時(shí) T、偽距量測噪聲量ερ,計(jì)算當(dāng)前時(shí)刻的偽距值:

計(jì)算 k時(shí)刻的碼頻率 fcode, k值[7]:

通過更新的碼頻率反饋到碼 NCO,調(diào)整各跟蹤通道的碼頻率實(shí)現(xiàn)所有通道的信息共享。
2.3導(dǎo)航解算
為了計(jì)算接收機(jī)的位置、速度、時(shí)間信息,并對跟蹤過程與解算過程建立聯(lián)系,選取KF作為導(dǎo)航濾波器。KF包括狀態(tài)模型和量測模型兩部分,具體理論如下。
KF狀態(tài)量為:
狀態(tài)模型為:
狀態(tài)轉(zhuǎn)移矩陣 Φ 為:
式中 τ為 KF更新時(shí)間間隔。
量測量由跟蹤環(huán)路測得的偽距誤差 Δρ、偽距率誤差 Δρ? 構(gòu)成。

KF的量測模型為:

其中:
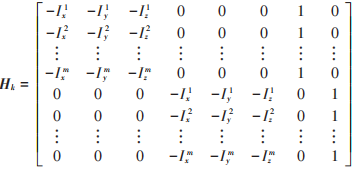
式中:1, 2,?, m 表示參與定位的衛(wèi)星代號(hào);[ I x ,I y ,Iz ]是衛(wèi)星在接收機(jī)處的單位觀測矢量。
3 實(shí)驗(yàn)和結(jié)果分析
3.1 實(shí)驗(yàn)數(shù)據(jù)采集
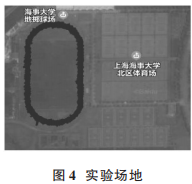
為了驗(yàn)證所提出的 FLL 輔助 PLL 的矢量跟蹤結(jié)構(gòu)相較于傳統(tǒng)的標(biāo)量跟蹤結(jié)構(gòu)有更好的跟蹤性能和定位性能,本文進(jìn)行了動(dòng)態(tài)實(shí)驗(yàn)驗(yàn)證。在本實(shí)驗(yàn)中,中頻信號(hào) 采 集 器 采 集 GPS 的 L1 波 段 信 號(hào) 并 轉(zhuǎn) 換 為 頻 率 為3.996 MHz的中頻信號(hào),采樣頻率為 16.369 MHz。實(shí)驗(yàn)裝置如圖 3 所示,天線設(shè)備安裝在電瓶車車筐頂端,電源和中頻信號(hào)采集器在車筐內(nèi)。實(shí)驗(yàn)在上海海事大學(xué)擲球場跑道進(jìn)行,實(shí)驗(yàn)時(shí)長為 150 s,實(shí)驗(yàn)場地如圖4所示。

3.2 實(shí)驗(yàn)結(jié)果分析
根據(jù)所提出的 FLL 輔助 PLL 的矢量跟蹤環(huán)路結(jié)果進(jìn)行實(shí)驗(yàn)數(shù)據(jù)處理,分別對衛(wèi)星信號(hào)的載波頻率、碼頻率和定位結(jié)果三個(gè)參量進(jìn)行對比分析。
圖 5和圖 6給出了環(huán)路跟蹤的載波頻率和碼頻率對比結(jié)果,灰色點(diǎn)代表傳統(tǒng)的標(biāo)量跟蹤結(jié)果,黑色點(diǎn)代表本文提出的 FLL輔助 PLL的矢量跟蹤結(jié)果。
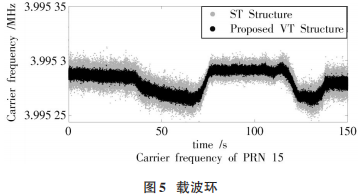
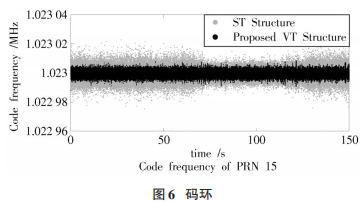
載波頻率標(biāo)準(zhǔn)差分別為 10.663 1 m,9.632 3 m;碼頻率標(biāo)準(zhǔn)差分別為4.011 1 m,1.8326m。從圖5、圖 6中可以看出,動(dòng)態(tài)環(huán)境下所提出的FLL輔助PLL 的矢量跟蹤方法相較于傳統(tǒng)標(biāo)量跟蹤方法具有更高的跟蹤精度,GNSS 跟蹤環(huán)路輸出的載波頻率和碼頻率波動(dòng)性明顯更小。載波環(huán)精度提高是因?yàn)?FLL 輔助 PLL 的載波跟蹤方式可以更穩(wěn)定地跟蹤載波信號(hào)。碼環(huán)精度提高是因?yàn)槭噶扛櫧Y(jié)構(gòu)的碼頻率是通過導(dǎo)航解算部分的偽距信息預(yù)測的,相較于傳統(tǒng)的標(biāo)量跟蹤精度更高。標(biāo)準(zhǔn)差計(jì)算公式為:

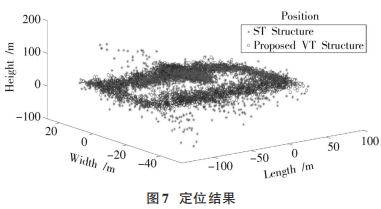
圖 7 對比了兩種方法的定位結(jié)果,星形標(biāo)號(hào)代表傳統(tǒng)的標(biāo)量跟蹤方法輸出的定位結(jié)果,小圓圈代表本文提出的 FLL 輔助 PLL 的矢量跟蹤方法輸出的定位結(jié)果。運(yùn)動(dòng)過程中,前者的球概率誤差(SEP)為 51.637 3 m,后者的 SEP 為 3.372 6 m。從圖 7中可以看出,使用傳統(tǒng)的標(biāo)量跟蹤方法解算出的定位結(jié)果較為分散,定位結(jié)果甚至分布在擲球場中央,部分結(jié)果的高度也不正確,而采用 FLL輔助 PLL的矢量跟蹤方法所得的定位結(jié)果軌跡效果明顯更好,定位精度更高。SEP計(jì)算公式為:

式中:σx 為東向標(biāo)準(zhǔn)差;σy 為北向標(biāo)準(zhǔn)差;σz 為天向標(biāo)準(zhǔn)差。
4 結(jié) 論
本文提出了一種 FLL 輔助 PLL 的矢量跟蹤方法,并通過實(shí)驗(yàn)驗(yàn)證了該方法的跟蹤及定位性能。分別對所提出方法與傳統(tǒng)方法的載波跟蹤頻率、碼頻率、定位結(jié)果三個(gè)參量進(jìn)行對比分析。實(shí)驗(yàn)結(jié)果表明,相較于傳統(tǒng)的標(biāo)量跟蹤方法,本文提出的 FLL 輔助 PLL 的矢量跟蹤方法能夠在動(dòng)態(tài)環(huán)境下輸出較小的載波頻率和碼頻率誤差,且具有更高的定位精度。
審核編輯:湯梓紅
-
接收機(jī)
+關(guān)注
關(guān)注
8文章
1158瀏覽量
53177 -
pll
+關(guān)注
關(guān)注
6文章
767瀏覽量
134859 -
GNSS
+關(guān)注
關(guān)注
9文章
724瀏覽量
47643 -
導(dǎo)航衛(wèi)星系統(tǒng)
+關(guān)注
關(guān)注
0文章
10瀏覽量
2992
原文標(biāo)題:論文速覽 | 一種 FLL 輔助 PLL 的 GNSS接收機(jī)矢量跟蹤環(huán)路
文章出處:【微信號(hào):現(xiàn)代電子技術(shù),微信公眾號(hào):現(xiàn)代電子技術(shù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評(píng)論請先 登錄
相關(guān)推薦
衛(wèi)星定位接收機(jī)載波跟蹤的設(shè)計(jì)與實(shí)現(xiàn)
基于數(shù)字基帶芯片的高靈敏度接收機(jī)跟蹤環(huán)路設(shè)計(jì)
GPS軟件接收機(jī)跟蹤環(huán)路設(shè)計(jì)
基于SoC的星載微型GNSS接收機(jī)設(shè)計(jì)
碼環(huán)與載波環(huán)路鑒相、鑒頻原理
一種基于FPGA的時(shí)鐘跟蹤環(huán)路的設(shè)計(jì)與實(shí)現(xiàn)

針對GPS接收機(jī)中載波跟蹤環(huán)路的設(shè)計(jì)與研究
GPS信號(hào)跟蹤算法
GNSS接收機(jī)維護(hù)保養(yǎng)方法

基于GPS軟件接收機(jī)跟蹤環(huán)路設(shè)計(jì)

GNSS接收機(jī)是什么?怎么分類的?
大壩安全監(jiān)測GNSS接收機(jī):保障水庫安全






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論