 基于自動駕駛汽車記錄的3D激光掃描的SLAM閉環問題討論
基于自動駕駛汽車記錄的3D激光掃描的SLAM閉環問題討論
簡介
我們在之前的博客中討論了一些激光回環檢測的方法,但是基本都是圍繞著點云特征去做的,并未涉足過深度學習的相關方法,之前作者在查找《經典文獻閱讀之—BoW3D》資料時看到了一個比較感興趣的工作《OverlapNet: Loop Closing for LiDAR-based SLAM》,同時這個文章還擁有對應的開源源碼Github,非常適合復現以及學習。
工作重心
同時定位和映射(SLAM)是大多數自主系統所需的基本能力。在本文中,我們討論了基于自動駕駛汽車記錄的3D激光掃描的SLAM閉環問題。
我們的方法利用深度神經網絡,利用從激光雷達數據生成的不同線索來尋找環路閉合。
它估計廣義到距離圖像的圖像重疊,并提供掃描對之間的相對偏航角估計。
基于這些預測,我們處理環路閉合檢測,并將我們的方法集成到現有的SLAM系統中,以改善其映射結果。
簡單來說,作者通過深度學習完成點云轉換為影像,然后做回環檢測, 輸出Overlap和yaw的操作步驟,文中指出,本文的主要創新點有:
能夠利用多個線索,不需提前知道兩個雷達掃描的相對位姿,只利用范圍、法向量、強度和語義等線索,使用深度神經網絡直接估計兩個激光雷達掃描的重疊率,以及相對偏航角。
結合里程計信息和重疊率預測實現閉環的檢測、修正,可以檢測到的閉環整合到現有SLAM系統中,可以提高整體位姿估計的結果,產生全局一致的地圖。
無需先驗位姿信息,解決在自動駕駛中3D LiDAR SLAM 的閉環檢測問題,使用產生正確掃描匹配結果的OverlapNet網絡預測初始化ICP
詳細算法
2.1 Overlap的概念
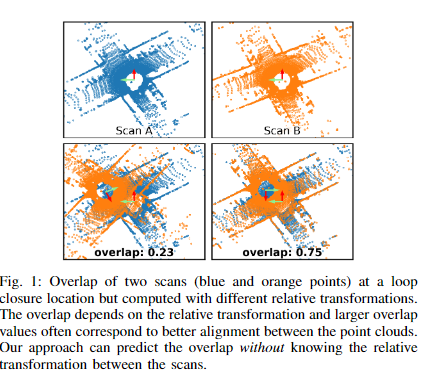
作者認為直接對比兩個點云之間的距離不夠精確,因為會受漂移的影響。
因此提出用重疊率來代替距離檢測回環。具體思路是由影像的overlap中來,要成功匹配兩個圖像并計算它們的相對姿態,圖像必須重疊。
這可以通過將重疊百分比定義為第一圖像中的像素的百分比來量化,該像素可以在沒有遮擋的情況下成功地投影回第二圖像中。
請注意,該度量不是對稱的:如果圖像對存在較大的尺度差異。
例如,一幅圖像顯示一堵墻,另一幅顯示該墻周圍的許多建筑物,則第一到第二幅圖像的重疊百分比可能較大,而第二到第一幅圖像的交疊百分比較低。
在本文中,我們使用了距離圖像重疊的思想,明確地利用了距離信息
對于環路閉合,重疊百分比的閾值可用于決定兩個激光雷達掃描是否在同一位置和/或環路閉合。
對于環路閉合,這種測量可能比一對掃描記錄位置之間的常用距離更好,因為位置可能會受到漂移的影響,因此不可靠。
重疊預測與相對姿勢無關,因此可用于查找環路閉合,而無需知道掃描之間的正確相對姿勢。
2.2 激光雷達掃描對之間重疊的定義
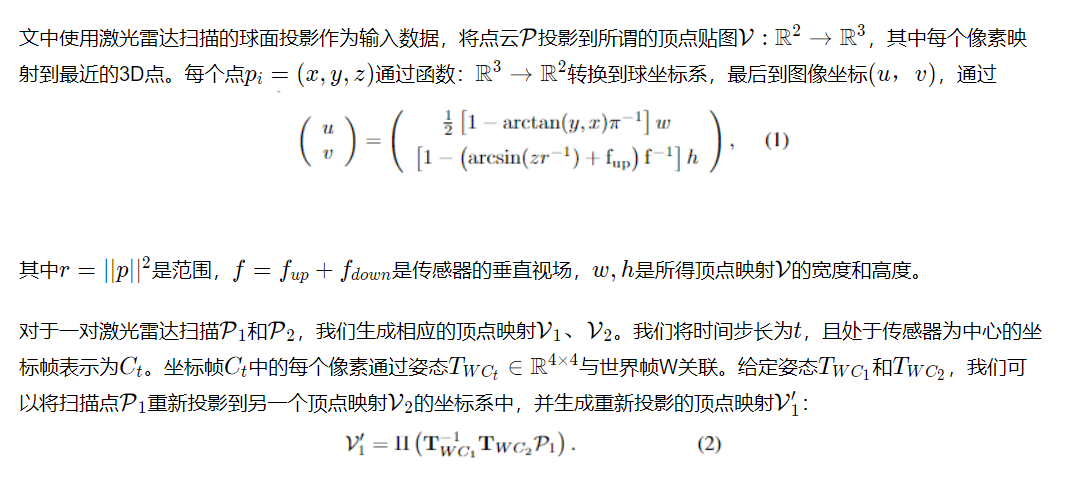
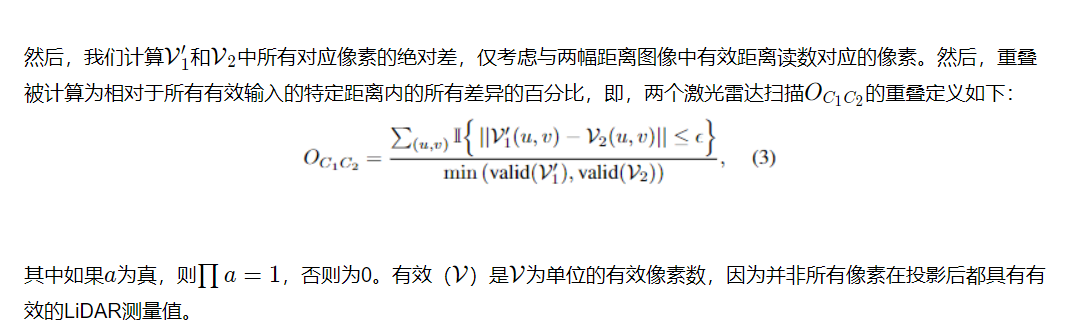
簡單來說就是將兩個點云轉化為二維圖并且坐標系對齊,如果兩個坐標差小于閾值記為1,否則為零,求和再除以兩個圖中像素較小的那個,作者想用這個等式建立訓練集。
對于旋轉,作者選擇旋轉多個角度,用最大重疊值代表最終重疊值。
2.3 網絡結構
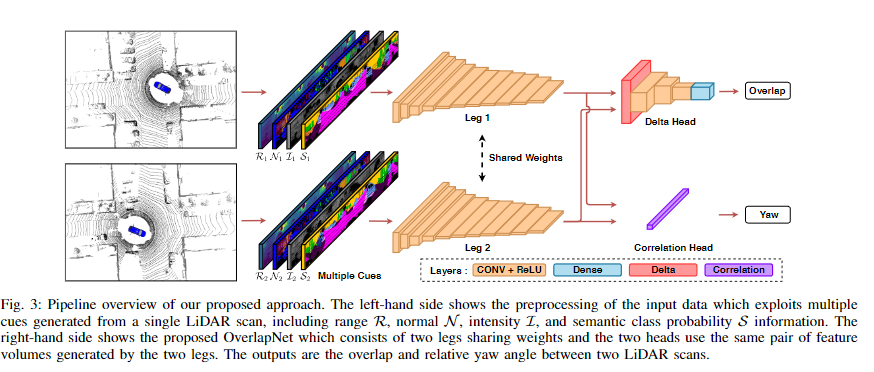
下圖描述了所提出的重疊網絡的概述。我們利用了多個線索,這些線索可以從單個激光雷達掃描中生成,包括深度、法線、強度和語義類概率信息。
深度信息存儲在由一個通道組成的范圍圖R中。我們使用頂點映射的鄰域信息來生成法線映射N,它有三個通道編碼法線坐標。
我們直接從傳感器獲得強度信息,也稱為緩解,并使用強度信息為單通道強度圖I。使用RangeNet++計算逐點語義類概率,我們將其表示為語義圖S。
RangeNet++提供20個不同類的概率。為了提高效率,我們使用主成分分析將20維RangeNet++輸出縮減為壓縮的三維向量。
信息被組合成一個大小為64×900×D64×900×D的輸入張量,其中64900是輸入的高度和寬度,$D$取決于使用的數據類型.
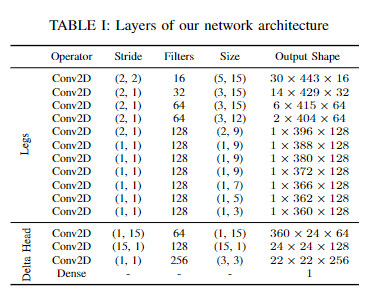
這里沒有特別仔細去研究,具體就是由兩個共享權重的Legs和由Legs生成的相同特征體積對的Head組成。
進一步說這個模型的作用就是將深度圖,向量圖,強度圖,還用RangeNet++做了個語義圖一起作為輸入。
一個輸出是角度特征向量,一個輸出是兩次掃描之間的重疊率。
同時使用基于surfel的映射系統SuMa作為的SLAM的 pipeline,并將OverlapNet集成到SuMa中,以取代其原始的啟發式環路閉合檢測方法。
所以說最后就是SuMa+OverlapNet的集合完成的。
審核編輯:劉清
-
SLAM
+關注
關注
23文章
419瀏覽量
31788 -
激光掃描
+關注
關注
0文章
114瀏覽量
11428
原文標題:經典文獻閱讀之—OverlapNet
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
激光雷達在SLAM算法中的應用綜述


使用STT全面提升自動駕駛中的多目標跟蹤


3D激光線掃輪廓傳感器在汽車行業的汽車車縫檢測的應用
聊聊自動駕駛離不開的感知硬件
神經重建在自動駕駛模擬中的應用

FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
自動駕駛汽車如何識別障礙物

未來已來,多傳感器融合感知是自動駕駛破局的關鍵
如何搞定自動駕駛3D目標檢測!






 工商網監
工商網監
評論