 EM解算器的實際應用
EM解算器的實際應用
在數字電子產品和有線通信的發展中,基于Maxwell方程組的電磁(Electromagnetic,簡稱EM)解算器被證明是非常有價值的。原因簡單明了,電氣工程師需要了解當受到動態或變化信號激勵時,電路或電氣互連的反應。在信號完整性領域,通過直流連接性測試的互連也可能在更高頻率下完全失效。在電源完整性領域,即使是測量到正確直流電壓的電源軌在施加動態負載時,也可能會進入振蕩。應該學會使用EM仿真器這項基本技能,可以在幾分鐘內獲得定性答案,并在幾天內獲得更高保真的答案,這就是因產品故障而導致夜不能寐的不良設計與具有較大設計裕度的穩健設計之間的區別。
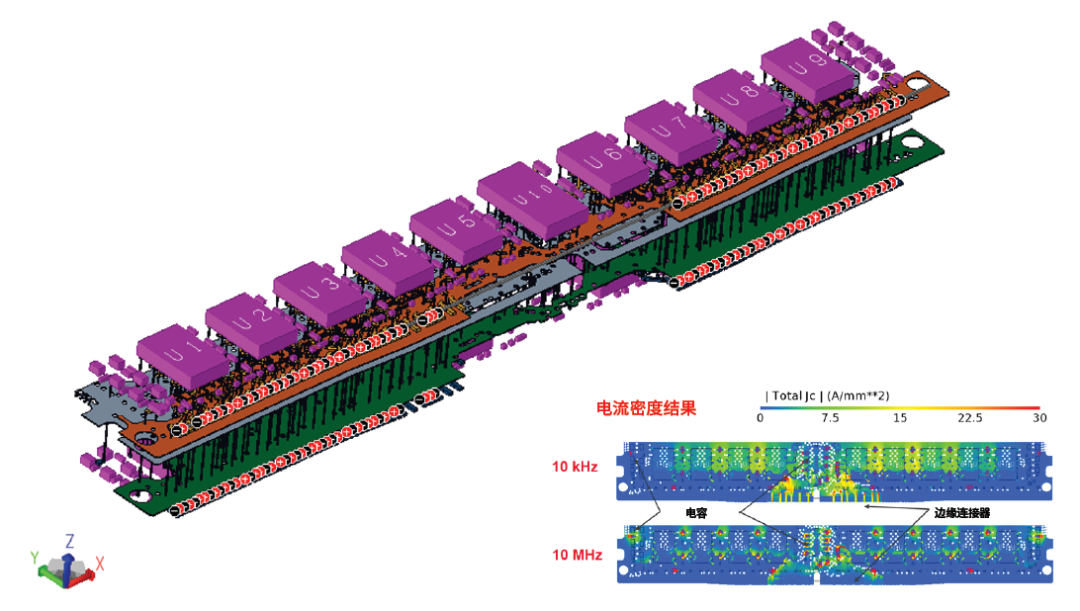
圖1: PathWave ADS SIPro和PIPro等3D EM仿真器可以輕松選擇網絡并自動分配端口,實現快速EM設置及仿真。右圖的DDR4 DIMM板EM電流密度結果顯示了在10 kHz下,功率由J1邊緣連接器傳遞,但在更高的10 MHz頻率下,功率由板載電容傳遞。
從始至終,EM仿真器一直在尋求精度和速度之間的平衡,以“網格化”三維結構來獲得正確答案。在尋找Maxwell方程組的最終解時,無論是在有限元法(finite element methods,簡稱FEM)的頻域中,還是在時域有限差分法(finite difference time domain,簡稱FDTD)的時域中,用戶界面都非常復雜。設置端口、邊界條件和網格拓撲可能會給高級用戶帶來額外的靈活性。對大多數人來說,我們需要自動化來減少重復性任務。
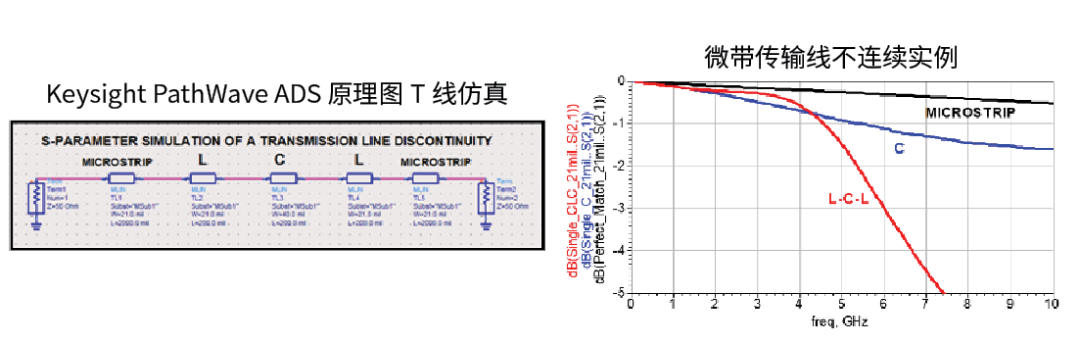
圖2:示意圖中是算法傳輸線模型的簡單級聯,可了解更寬的走線電容不連續性或更窄的走線電感不連續性對高頻信號傳輸所產生的影響。
好消息是現代計算機的處理速度和內存成本低,使得在提高速度的同時更容易保持精度。這增加了對特定應用用戶界面進行優化的投資,如模擬多層層壓PCB設計。改進的用戶界面,如Keysight的PathWave ADS SIPro和PIPro,依賴于強大的EDA PCB CAD數據導入,其中包括堆疊、網絡和元件,以便選擇網絡和實際元件進行仿真。端口可以自動分配,默認網格和邊界條件,使用戶能夠在幾分鐘內啟動并運行EM仿真。
然而,“垃圾輸入等于垃圾輸出”,以下是確保仿真器適當設置的技巧。
Eric Bogatin的提示:通過將復雜的EM模型轉換為簡單的傳輸線級聯和集總元件,快速了解預期結果。
Lee Ritchey的提示:通過創建機械測試結構,將走線布到每一層的電路板邊緣,以目視檢查層與層之間的對準、走線蝕刻寬度和層壓層的機械高度,了解最終結果。
我最喜歡的測量領域技巧:測量一些簡單的東西,如階梯阻抗轉換(Beatty標準),以驗證介質材料的性能,檢查機械尺寸與算法模型和測量的關系。
SI及 PI領域的提示:查看時域和頻域數據。
最后,將模型投入使用,檢查對制造和元件公差的敏感性。
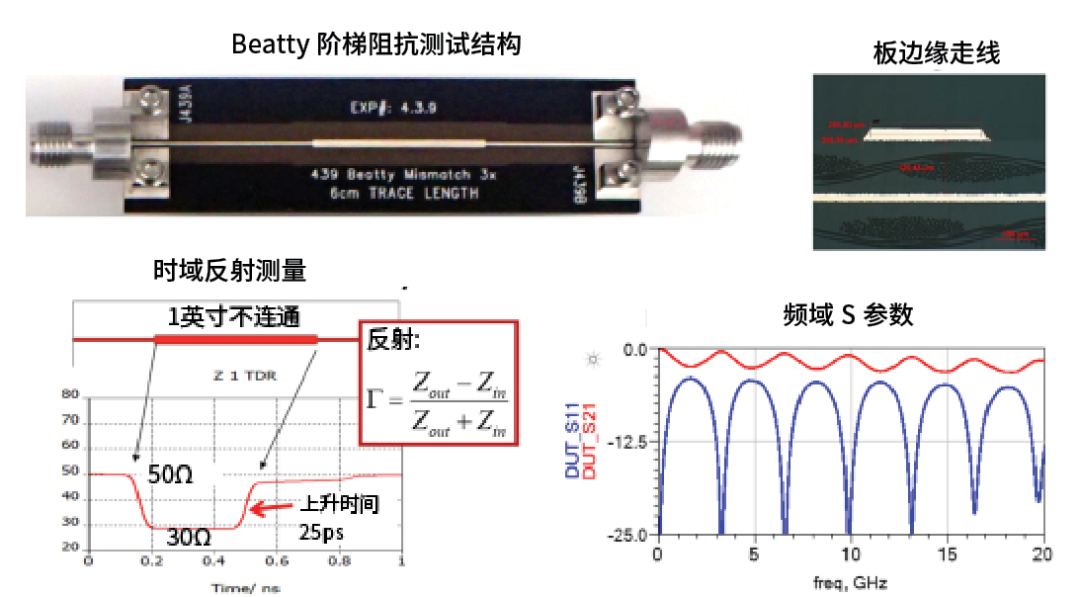
圖3:通過左下角圖中顯示的時域阻抗反射的基本方程,很容易理解左上角的簡單階梯阻抗Beatty測試結構。電路板邊緣的走線有助于驗證制造的疊層尺寸。右下角是模擬S參數的頻域EM,該參數可轉換為TDR數據的時域。
用于PCB設計的EM仿真器的速度、準確性和易設置性使得盲目利用數據表及已有設計變得不易被接受。當驗證動態操作性能時,工程師需要將EM仿真添加到他們的檢查表中。隨著電源軌電壓不斷降低的數千兆位電子產品其密度和速度的增加,簡單的直流檢查和沒有PCB寄生的集總SPICE建模已不足以滿足要求。
Heidi Barnes是Keysight Technologies公司高速數字應用高級應用工程師。她擁有5項專利,獲得了美國宇航局Snoopy銀獎。
審核編輯:湯梓紅
-
仿真器
+關注
關注
14文章
1016瀏覽量
83638 -
Em
+關注
關注
0文章
16瀏覽量
19355 -
Keysight
+關注
關注
13文章
76瀏覽量
37811
原文標題:是德科技:EM解算器的實際應用
文章出處:【微信號:actSMTC,微信公眾號:actSMTC】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【CANNON申請】姿態解算
請問姿態解算用什么方法處理更好?
請問MPU6050的軟件解算姿態和DMP解算姿態各自的優缺點是什么?
一種基于FPGA的高速導航解算方法設計
使用MPU6050硬件DMP解算姿態
基于MPU6050的四軸硬件姿態解算研究






 工商網監
工商網監
評論