") 如何重建三維空間模型
如何重建三維空間模型
第一部分 設計概述
1.1 設計目的
近年來,機器學習,無人駕駛等領域是十分熱門的研究話題。在這些領域中,電腦對環(huán)境的感知十分重要。因此三維的環(huán)境重建是必然的趨勢,方便我們實現(xiàn)虛擬世界與現(xiàn)實世界之間的交互。
在三維重建中,主流的方式有視覺和激光雷達兩種。視覺技術的測距方法是基于三角的測距法,最大范圍是 5-8m,并不適用于較大的空間,且這種方法受光線的影響很大。相比之下,激光雷達可以用于的場景更為廣泛。
1.2 應用領域
三維建模的應用很廣泛,例如無人機、無人駕駛汽車的即時避障,路徑規(guī)劃。同時也可以與機器視覺、3D 打印等技術也可以融合。在文物復刻和重建也是十分有意義的應用。本次設計的基于 ZYNQ 的激光雷達三維建模系統(tǒng),可以深入目標環(huán)境, 進行點云采集,重建三維空間模型,測量等機器視覺方面的應用。
1.3 主要技術特點
首先,本系統(tǒng)采用 pcl 點云庫中的 icp 算法,可將激光雷達返回的數(shù)據進行多次迭代計算,實現(xiàn)精確配準。
其次,本系統(tǒng)將激光雷達搭載在麥輪小車上,通過小車陀螺儀和電機編碼器,實時傳輸小車的位置和速度信息,通過坐標系變換可得到激光雷達的實時精準定位。
本設計可以對距離為 1~5m,盲區(qū)較少的室內物體進行實時的三維重建, 不易受光線的影響。激光雷達搭載在可遠程控制的小車上,可以用于勘察人無法進入的環(huán)境。
1.4 關鍵性能指標

1.5 主要創(chuàng)新點
(1) 可通過移動 app 對小車進行遠程控制;
(2) 算法基于 PCL 點云庫;
(3) 通過 Icp 算法可達到實時數(shù)據配準;
(4) 利用 pynq 的 PL 模塊對 icp 算法進行 HLS 加速。
第二部分 系統(tǒng)組成及功能說明
2.1 整體介紹
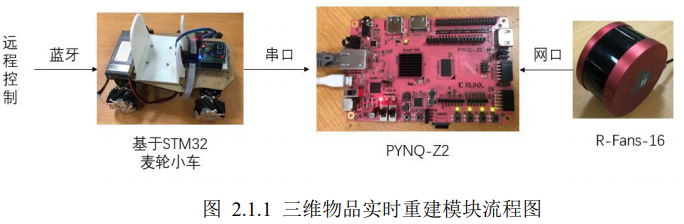
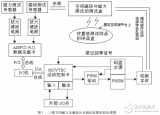
圖 2.1.1 是整個系統(tǒng)的實現(xiàn)框圖。系統(tǒng)由激光雷達、基于 STM32 的麥輪小車 和 Xilinx 公司 PYNQ-Z2 組成的。其中激光雷達通過網口將采集到的點云數(shù)據傳給 PYNQ-Z2,麥輪小車上搭載了電機編碼器、陀螺儀和藍牙模塊。轉向和移動可y由手機藍牙程序控制。在運動過程中,將位移和姿態(tài)信息傳遞給 STM32 單片機,通過 UART 協(xié)議 STM32 將這些信息傳遞給 PYNQ-Z2,ZYNQ 根據位移和姿態(tài)信息計算出激光雷達的位移和姿態(tài)偏移。ZYNQ 根據姿態(tài)和位置信息的偏移將點云數(shù)據利用 ICP 算法拼接起來,拼接后用網口傳出數(shù)據。
在本設計中,我們采用小車搭載激光雷達進行移動掃描,采集左、右和頂三面的信息進行重構。
2.2 各模塊介紹
2.2.1 R-Fans-16 激光雷達
本系統(tǒng)中激光雷達采集采用的是 R-Fans-16 導航型雷達,它通過 16 線 360°掃描實現(xiàn)三維探測成像。基于高精度激光回波信號測量技術,R-Fans-16 具備測程遠(探測能力最遠達到 200m),測量精度高(測距精度優(yōu)于 2cm),回波強度準確(目標反射回波強度達到 8 位)等技術特點,同時兼顧了俯仰方向的角度覆蓋和角分辨率。運行激光雷達時,通過網口將實時點云數(shù)據傳輸給 PYNQ-Z2。
2.2.2 基于 STM32 的麥輪小車
在這個麥輪小車上搭載了 STM32 單片機,本次實驗中,利用了小車上的陀螺儀、編碼器和藍牙。小車上的陀螺儀和電機編碼器通過 SPI 協(xié)議將數(shù)據傳給 STM32 單片機,單片機通過計算得到小車的姿態(tài)和輪胎轉速,然后利用 UART 協(xié)議,以 115200 的波特率將數(shù)據循環(huán)實時發(fā)送給 ZYNQ。小車的移動和轉向利用藍牙遠程控制。
2.2.3 坐標系轉換
本設計中采用的是 R-Fans-16 導航型雷達,它采集的數(shù)據是建立在自身的坐標系之中的,三維重建的本質是將激光雷達坐標系中的數(shù)據轉換為大地絕對坐標系,即球坐標系轉化為直角坐標系。
球坐標系是一種利用球坐標(r,θ,φ)表示一個點 P 在三維空間的位置的三維正交坐標系。如圖 2.2.1 所示,原點與點 P 之間的“徑向距離”為 r,原點到點 P 的連線與正 z 軸之間的“極角”為 θ,原點到點 P 的連線在 xy 平面的投影線與 x 軸之間的“方位角”為 φ。
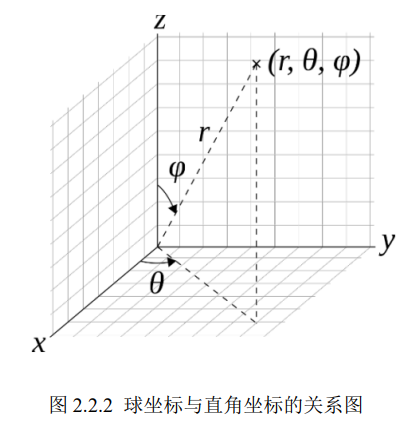
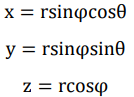
球坐標系與直角坐標系之間的公式轉化如下:
在本設計中,以車啟動時的坐標為絕對坐標系的坐標原點,此后在每圈激光雷達的數(shù)據期間,以激光雷達為坐標原點建立一個個子坐標系,并記錄此刻激光雷達在初始絕對坐標系下的位移偏轉量。
xyz 三個坐標軸的方向與激光雷達坐標系的軸方向一致。借助電機的編碼器, 可測得激光雷達的水平平面移動速度和方向,即可得知激光雷達坐標系與絕對坐標之間的平移量;通過陀螺儀,可測得激光雷達的姿態(tài)角,以得知激光雷達坐標系與絕對坐標系之間的旋轉量。借助以上測得的兩個數(shù)值以及球坐標系與直角坐標系之間的轉換公式,即可將激光雷達坐標系中的點映射到大地絕對坐標系中。
2.2.4 點云配準(ICP 算法)
ICP 算法配準就是要將兩個不同坐標系下的點集,利用它們的幾何特性匹配起來。需要求解目標點集和參考點集之間的剛體變換矩陣和平移矩陣,利用剛體變換矩陣作用在目標點集,使兩個點集盡可能重合。對于目標點集 P 和參考點集 Q 來說,轉換公式為:
上式不總是成立的,因此我們要最小化目標函數(shù)
求解 R 和 T 常用的方法有:SVD 和非線性優(yōu)化。本設計中使用了 SVD 的方法。
ICP 算法問題通常轉換為最小二乘最優(yōu)解問題,將整個問題分為兩部分,第一部分是第二部分的基礎和輸入。第一部分稱為粗略配準或全局配準,粗略配準即通過計算兩點集間的位姿,得出點集間的大致重合結果,為下一步的精確配準提供合適初值。第二部分稱精確配準或局部配準,對兩個距離足夠接近的點集使用迭代優(yōu)化策略以達到最終的配準結果。
第三部分 完成情況及性能參數(shù)
3.1 總述
本系統(tǒng)本設計完成了激光雷達的點云采集、 陀螺儀、編碼器的姿態(tài)信息采 集。PYNQ-Z2 開發(fā)板的控制芯片 ZYNQ 使用的 PS-PL 設計極大地提高了系 統(tǒng)設計的便捷性、可行性,降低了系統(tǒng)的設計難度。PS-PL 主從設計在保留系 統(tǒng)設計的簡易性同時提高了系統(tǒng)的運行速度和處理能力。PL 端 IP 核的設計極 大地加快了算法的計算速度。本設計的點云拼接部分通過 PL 端的 IP 核加速, 增強了拼接效果,成功地實現(xiàn)了實時三維重建的功能。
3.2 完成情況
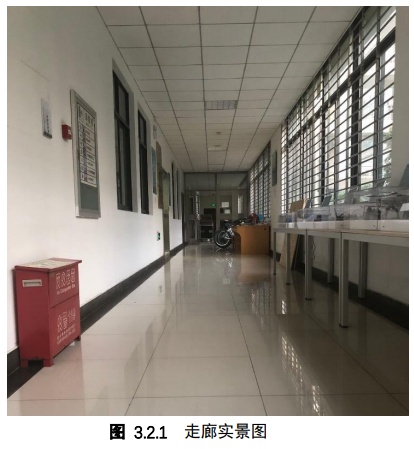
在室內走廊中,我們擺放了一排桌子、一個消防滅火器,兩側分別為墻壁和 窗戶,具體場景如下圖 3.2.1 所示。
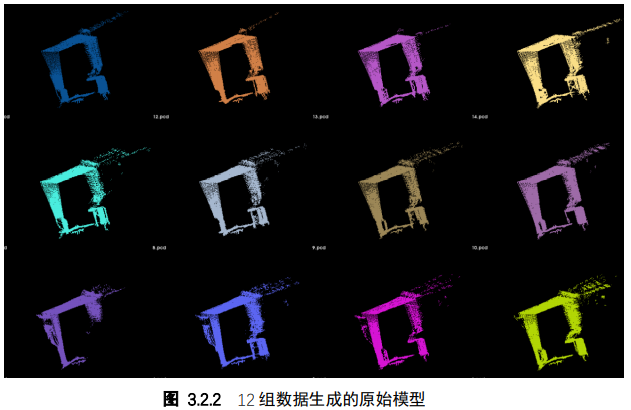
每采集 200 幀作為一組數(shù)據,存入 pcd 文件,得到每組數(shù)據生成的原始圖像如圖 3.2.2 所示,圖像右側為擺放桌子一側,可看到明顯桌面和桌腳的細節(jié),左側較低側為擺放的消防滅火器。
每相鄰兩組點云進行 icp 配準,得到完整的小車駛過走廊的三維模型如圖 3.2.3 所示。
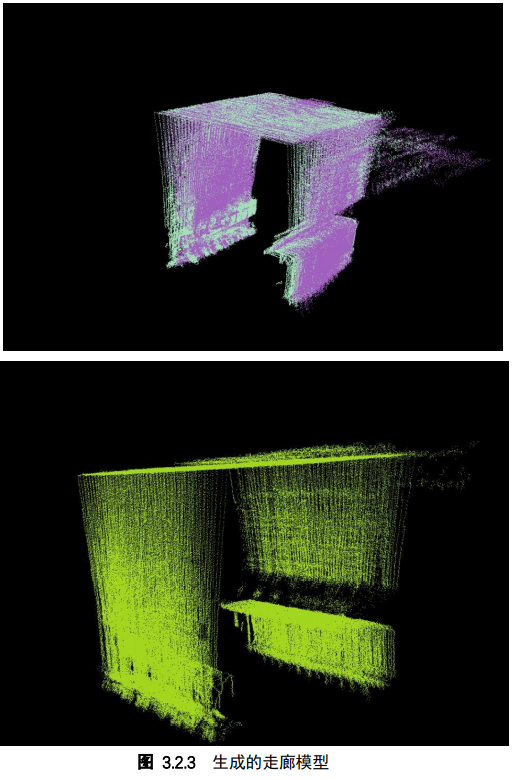
圖片右側離散的小點云為走廊中的窗戶投射到室外返回的激光,若走廊兩側都為墻面,則可返回得到完整的三維模型。
3.3 性能參數(shù)
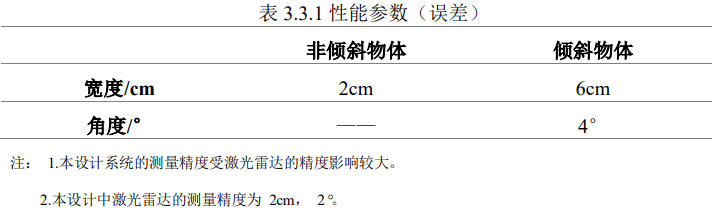
激光雷達點云采集時距離越遠分辨率越低,在有效探測距離內對物體的寬度和深度的測量誤差取決于設備的穩(wěn)定性(這里指激光雷達的抖動程度)。寬度測量誤差在 2cm 內,傾斜物體的測量誤差為 6cm,傾斜角度的誤差為 4°。由于測量時小車自身會有輕微抖動,所以結果有一定的誤差。
第四部分 總結
可擴展之處
(1)使用 python 編程。本次設計是 ZYNQ 上搭載了 Utunbu18.04,基于 C++ 語言的編程。使用過程中只能調用 C 語言基本的庫中的函數(shù)以及 PCL 庫函數(shù), 顯示并不方便,對使用者并不友好。可將 PCL 移植到 Jupyter 平臺,利用 Python 更方便更快捷。
(2)全方位的立體掃描。對于搭載激光雷達的小車來說,只能掃描小車的 左、右和頂三面進行單向的掃描。想要掃描一個特定的物體,則無法了解其立體的信息,可以選擇更靈活的搭載物,例如無人機。
-
模型
+關注
關注
1文章
3171瀏覽量
48711 -
三維空間
+關注
關注
0文章
17瀏覽量
7474 -
視覺技術
+關注
關注
0文章
87瀏覽量
13501
原文標題:基于 ZYNQ 的激光雷達三維建模
文章出處:【微信號:HXSLH1010101010,微信公眾號:FPGA技術江湖】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
基于多傳感器數(shù)據融合處理實現(xiàn)與城市三維空間和時間配準

labview 利用三維空間畫了一個球,然后想在球面上畫幾個點
請問ADXL345配合陀螺儀能精確測量短時三維空間運動路徑嗎?
基于麥克風陣列模擬人耳進行三維空間的聲源定位
三維空間中每一平面有四個點,能根據這四個點畫出一個圓來嗎 ?
基于交流伺服控制的三維空間磁場與磁力測試技術
一種用于三維空間雜波環(huán)境機動目標跟蹤的數(shù)據互聯(lián)方法
基于伺服控制的三維空間磁場與磁力測試系統(tǒng)
多電平逆變器三維空間矢量調制





 工商網監(jiān)
工商網監(jiān)
評論