") 無人潛航器和無人機的COTS解決方案的共性
無人潛航器和無人機的COTS解決方案的共性
前段時間,當設計人員開始考慮無人海底飛行器(UUV)應用時,有人擔心海底環(huán)境可能如此不同或奇特,以至于標準解決方案需要大幅修改。然而,令許多人驚訝的是,發(fā)現(xiàn)無人機(UAV)和UUV環(huán)境之間存在顯著的共性。可以肯定的是,每種類型的平臺都有獨特的方面,但總的來說,標準堅固的軍事商用現(xiàn)貨(COTS)嵌入式解決方案適用于這兩種平臺。
美國海軍看到了使用無人水下飛行器(UUV)的巨大潛力,這些車輛今天已經(jīng)在搜索和排除水雷以及收集海洋學數(shù)據(jù)等任務中服役。如果無人駕駛空中和地面車輛的使用激增是任何預測因素,那么這些平臺的任務范圍和范圍肯定會迅速擴大。
預計這些車輛,無論是小到足以從潛艇的魚雷發(fā)射管發(fā)射,還是像波音的Echo Voyager一樣長51英尺,都將具有越來越多的自主性,并將被派往越來越復雜的任務,如情報,監(jiān)視和偵察(ISR)和態(tài)勢感知。這些類型的計算密集型應用程序?qū)⑼苿有枰赨UV上部署的處理和網(wǎng)絡能力的大幅增加。好消息是,許多已經(jīng)在無人機(UAV)上開發(fā)、部署和現(xiàn)場驗證的COTS解決方案也適用于UUV。無人潛航器面臨的挑戰(zhàn),就像它們的空中和地面兄弟姐妹一樣,通常歸結(jié)為尺寸、重量和功率——尤其是功率。
UUV系統(tǒng)設計人員的訣竅是如何最好地優(yōu)化任務有效載荷,同時考慮到水下航行器動力源的限制,這最終決定了最大續(xù)航力,距離和速度。根據(jù)定義,無人潛航器必須穿過濃稠的水介質(zhì),這意味著它需要八倍的能量才能使其以兩倍的速度行駛。這就是為什么有一場技術競賽來開發(fā)為UUV提供動力的最佳方式。今天的動力候選范圍從環(huán)境推進的波浪滑翔機到電池,如鋰離子設計,再到燃料發(fā)動機和電池。例如,最近,Aerojet Rocketdyne獲得了美國海軍的合同,開發(fā)技術,使UUV的電池能夠在海底無線和遠程充電。
COTS供應商通過應用他們在小型化電子設備和惡劣環(huán)境加固方面的專業(yè)知識,在幫助擴展UUV的能力方面發(fā)揮著重要作用。無人機典型的SWaP約束與水下航行器中的約束相似。此外,可以使用相同的系統(tǒng)架構(gòu)、技術、模塊和線路可更換單元 (LRU) 方法來加快開發(fā)速度并降低成本。但是,在海底部署COTS系統(tǒng)與在空中部署時存在一些差異。其中一些差異實際上使UUV設計人員的生活更輕松,并增加了與機載系統(tǒng)集成商不同的要求。
冷卻它
可以肯定的是,對于大多數(shù)COTS系統(tǒng)設計人員來說,水下環(huán)境是不熟悉的。因此,發(fā)現(xiàn)UUV相對于空中和地面車輛的最大區(qū)別(和優(yōu)勢)之一是它們在所謂的世界上最大的散熱器上運行,可能會令人驚喜。因此,提供高效的熱管理在水下的麻煩要少得多。事實上,對于某些設計,實際上可以讓水流過UUV的內(nèi)部,以直接冷卻隔離的有效載荷室。
冷卻對無人機來說是一個挑戰(zhàn),原因很簡單,在高海拔地區(qū),空氣中的分子較少。在無人機系統(tǒng)要求沒有為冷卻電子設備提供氣流的情況下,熱管理更加困難。UUV系統(tǒng)設計人員的優(yōu)勢在于,為在高海拔地區(qū)運行而建造的COTS系統(tǒng)也是可以信賴的在水下表現(xiàn)良好的系統(tǒng)。事實上,在沒有空氣的地方飛行的無人機的冷卻要求比部署在密封室中的系統(tǒng)要嚴格得多,就像許多UUV子系統(tǒng)一樣。
UUV系統(tǒng)設計師也不必擔心高度。對于機載應用,海拔高度可能令人擔憂,因為它對電解電容器等組件有潛在影響,這些組件在較高海拔地區(qū)容易發(fā)生故障。無人機系統(tǒng)設計人員必須確保他們使用的組件符合預期用途的高度等級。例如,直升機通常對可以在15,000英尺高空運行的設備感到滿意,而偵察機可能需要可以在30,000至60,000英尺的高度運行的設備。機載 COTS 系統(tǒng)通常必須在高度模擬室中通過 MIL-STD-810 高度測試,以驗證在預期應用所需的高度下的操作。
無人潛航器的不同之處:沖擊測試
雖然高度不是UUV的要求,但它們可能與無人機具有非常不同的沖擊和振動要求。例如,UUV測試可能需要模擬魚雷擊中的影響。認證此類威脅意味著UUV子系統(tǒng)可能需要證明MIL-S-901D(美國海軍沖擊測試標準)所涵蓋的相關頻率的可靠性。在這種情況下,用于部署在UUV上的COTS解決方案可能需要在浮動駁船測試中幸存下來,在那里它暴露在爆炸性沖擊下。或者,沖擊測試可能涉及901D錘擊測試,在此期間,電子設備被硬安裝在金屬板上,然后用大型錘狀擺錘裝置敲擊,產(chǎn)生大量的G力。
全面的 SoC
總體而言,UUV、無人機甚至無人駕駛地面車輛 (UGV) 的 COTS 解決方案要求存在很大的共性。例如,所有三個平臺都可以使用片上系統(tǒng) (SoC) 技術: 由于 SWaP 是一個關鍵問題,因此使用基于 Intel 和 ARM 內(nèi)核 SoC 的移動類處理器(將 CPU、I/O 和內(nèi)存控制器全部整合到單個 IC 封裝中,例如英特爾凌動 3800 系列處理器)是有益的。可以選擇組合處理器、其配套芯片組和圖形處理器(如英特爾凌動)的單個芯片,或組合更高性能的 CPU 和集成 GPU(如英特爾酷睿 i7 產(chǎn)品)有助于減少物理板的空間和重量,從而減少系統(tǒng)的整體物理尺寸。此外,這些架構(gòu)中的每一個都使用先進的電源管理技術,從每瓦特MIPS(每秒數(shù)百萬條指令)或FLOPS(每秒浮點運算)的角度來看,它們的效率要高得多。因此,它們越來越多地用于存在功率靈敏度的應用,例如UUV。
UUV 組件的一個很好的解決方案是通過被動自然對流冷卻的 LRU;在這些中,熱量通過機箱的熱質(zhì)量向外輻射,沒有任何移動部件、液體或氣流。由于機箱不需要用螺栓固定即可將熱量向下傳導到冷板,因此這些類型的子系統(tǒng)更容易進行熱管理和集成,并且可以位于平臺內(nèi)更廣泛的位置。在自然對流下冷卻的堅固耐用的LRU的一個例子是Curtiss-Wright的Parvus DuraCOR任務計算機和DuraNET網(wǎng)絡交換機(圖1)。
圖1:DuraNET 20-11 交換機支持 IEEE-1588 PTP,可用于 UUV 和 UAV 應用。

無論平臺是UUV還是UAV,任務通常需要通信,計算和傳感器。目標環(huán)境,無論是空中、地面還是海上,都將決定需要支持哪些類型的傳感器。例如,無人機需要FLIR(一種前視紅外攝像機),而UUV則需要聲納。盡管各種類型的車輛之間的有效載荷會有所不同,但基本的COTS電子設備不會有太大差異。
UUV和UAV之間的另一個共同點似乎是使用以太網(wǎng)作為選擇的網(wǎng)絡骨干。兩個平臺的底層基礎設施將使用相同的傳統(tǒng)以太網(wǎng)接口連接,并且可以使用相同的 COTS 構(gòu)建塊進行構(gòu)建。此外,通過網(wǎng)絡進行IEEE-1588精確計時協(xié)議(PTP)同步也越來越成為海底和飛行器之間的共同特征。
審核編輯:郭婷
-
嵌入式
+關注
關注
5068文章
19019瀏覽量
303292 -
無人機
+關注
關注
228文章
10340瀏覽量
179633
發(fā)布評論請先 登錄
相關推薦
科技防線:無人機干擾系統(tǒng)如何保障空域安全 特信無人機反制
無人機巡檢系統(tǒng)光伏巡檢方案與作用
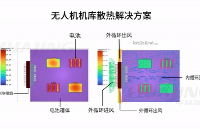
無人機機巢散熱解決方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論