") MPS | 雙極性步進電機如何流暢運行
MPS | 雙極性步進電機如何流暢運行
在如今這個智能時代,步進電機由于其特有的開環(huán)位置控制性能在各行各業(yè)均有被應用到。
設備在步進電機轉(zhuǎn)動的過程中,對它輸出力矩的平滑性有一定的要求。
像云臺球機,轉(zhuǎn)動的穩(wěn)定性將會影響到拍攝圖像的質(zhì)量。
這一性能除了和步進電機本體的工藝相關以外,和步進電機的控制方式也是息息相關的。
今天我們所介紹的就是其中的一種控制方式 --- 細分控制。
那么步進電機要如何修煉成細分控制,來精進自己的武藝呢?

PART1何為雙極性步進電機?
話說很久以前,電機屆有這么一個電機名叫雙極性步進電機(從電機控制出發(fā)的叫法)。除此之外,他又名兩相四線步進電機(從電機本體出發(fā)的叫法),他天生奇特,內(nèi)有乾坤。
01定子
8個定子上分別繞有兩相雙極性繞組(見圖1),A相繞組繞線從定子1開始繞,依次繞到定子3,5,7上,值得注意的是定子1和5的繞線方向是一致的,定子3和7的繞線方向是一致的,兩組繞線方向相反(見圖2)。
B相繞組也是以同樣的原理進行繞制。每個定子鐵芯上帶有五齒。
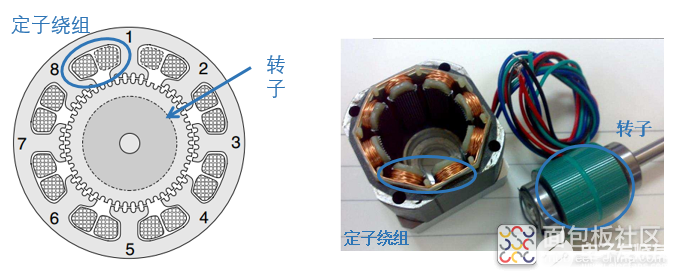
圖1:雙極性步進電機結(jié)構(gòu)示意圖
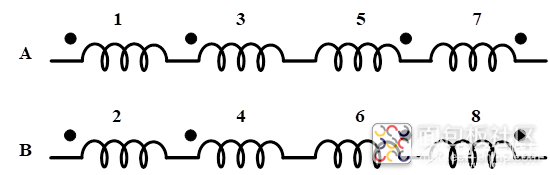
圖2:極性步進電機繞組原理圖
02轉(zhuǎn)子
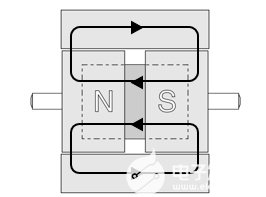
通常轉(zhuǎn)子上貼有軸向充磁的永磁體(見圖3),永磁體磁力線在電機本體內(nèi)形成閉合,由于磁力線和磁阻效應,即使步進電機在不通電的情況下也會擁有一定的鎖定力矩(見圖4)。
轉(zhuǎn)子上擁有50個齒,和定子齒輪相對起來,由于這樣的齒數(shù)和相數(shù)結(jié)構(gòu),它擁有1.8度的步進角度(見圖5)。步進角度:電氣周期完成90度,步進電機轉(zhuǎn)子前進的機械角度。
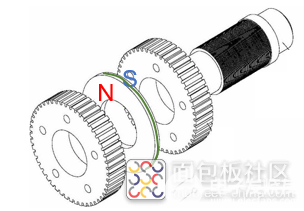
圖3:轉(zhuǎn)子結(jié)構(gòu)示意圖
PART2雙極性步進電機的步進模式
為了方便講解后續(xù)的控制方式,將復雜的結(jié)構(gòu)圖變成示意圖(見圖6)。可以認為步進電機的定子和轉(zhuǎn)子都只有一個齒。它使得驅(qū)動和其它電機不同,叫做雙全橋驅(qū)動。它的A相繞組接在第一個全橋驅(qū)動上,B相繞組接在第二個全橋驅(qū)動上(見圖7)。
還不會細分控制的它在電機屆還是默默無聞,為了能夠在電機屆闖出名堂,它刻苦練習,研究不同的控制方式,希望自己的旋轉(zhuǎn)性能日后能在江湖上占得一席之地。
到目前為止,它已經(jīng)掌握了三種控制方式,分別為單相步進,整步步進,半步步進。這三板斧使得虎虎生威,我們來詳細看看。
01第一板斧:單相步進
當A相和B相按照單相步進的模式依次通電的時候,定子磁場會相應地進行變化,轉(zhuǎn)子也會由于極性相吸,轉(zhuǎn)動起來。AB相的通電順序和轉(zhuǎn)子的轉(zhuǎn)動位置可以看表1的內(nèi)容。當然看視頻效果是最佳的!
簡單描述以下單相步進的過程:
當A通電的時候,驅(qū)動電流由Q1流向Q4,此時定子A上端為N,下端為S,轉(zhuǎn)子轉(zhuǎn)到位置8。
接下來,B相通電。當B通電的時候,驅(qū)動電流由Q5流向Q8,此時定子B左端為S,右端為N,轉(zhuǎn)子轉(zhuǎn)到位置2。
接下來兩個狀態(tài)原理和上面類似,就不多啰嗦了,循環(huán)這一通電順序,轉(zhuǎn)子就開始轉(zhuǎn)動起來。
02第二板斧:整步步進
和單相步進不同的是,整步步進式AB繞組會同時進行通電。并且也是有四個對應的通電方式和轉(zhuǎn)子電氣位置,只不過位置空間在電氣空間上和單相步進不一樣。根據(jù)整部的通電順序,轉(zhuǎn)子也是能轉(zhuǎn)動起來。具體的過程就不贅述了,想要生動的效果要記得看視頻!
03第三板斧:半步步進
仔細看過表1的讀者們肯定已經(jīng)發(fā)現(xiàn)了步進電機步進的秘密!
這個最后一板斧就是將上面兩種控制方式進行融合,就有了半步控制,它的電氣角度位置更多,電流波形更加細致,轉(zhuǎn)動更加平滑。
但步進電機想靠這三板斧在高手如林的電機屆闖出名堂,還遠遠不夠,因此它需要繼續(xù)苦心修煉。
審核編輯 黃昊宇
-
電機
+關注
關注
142文章
8938瀏覽量
145123
發(fā)布評論請先 登錄
相關推薦
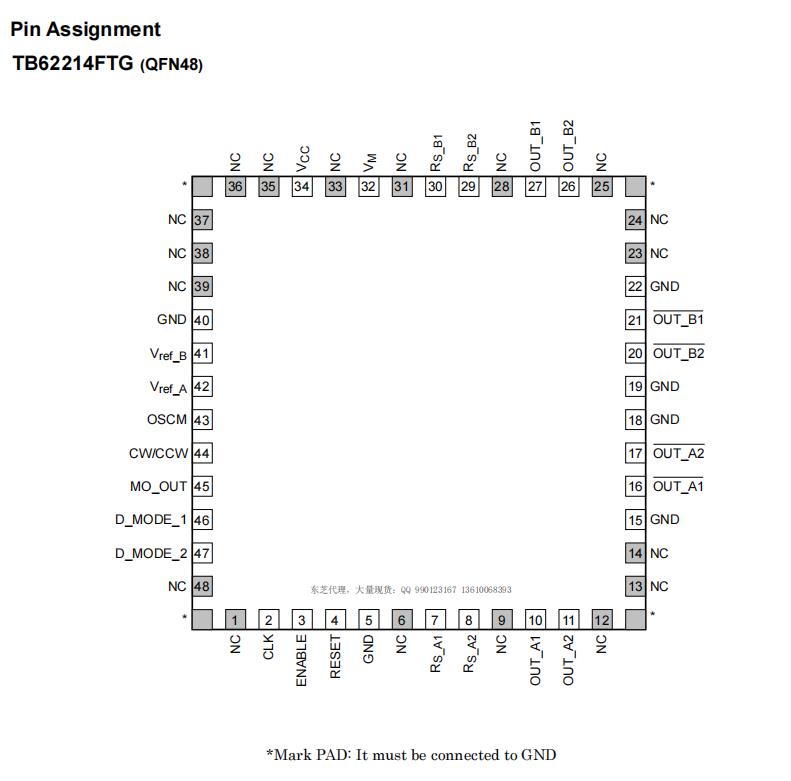
探索TB62214FG:高性能雙極步進電機驅(qū)動IC,助力精確控制
智能調(diào)優(yōu),使步進電機安靜而高效地運行

如何正確運行步進電機官方例程

雙極步進電機的結(jié)構(gòu)和特點
什么是步進電機控制器?步進電機控制器電路圖

雙極性步進電機的結(jié)構(gòu)與控制模式
什么是雙極性步進電機?它有哪些特點?
步進電機驅(qū)動器細分怎么調(diào)
步進電機單極性和雙極的優(yōu)缺點
雙極性步進電機及其結(jié)構(gòu)和控制模式介紹

有源增益控制時鐘控制雙極性步進電機驅(qū)動器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論