 CanTrcv_SetOpMode被哪個模塊調用?在什么場景下調用?
CanTrcv_SetOpMode被哪個模塊調用?在什么場景下調用?
前言
汽車工程師對CAN收發器應該都比較熟悉,但是最近在復盤AUTOSAR架構下的CanTrcv模塊的時發現對CAN收發器及CanTrcv模塊還有幾個疑問:
(1)CanTrcv_SetOpMode被哪個模塊調用,在什么場景下調用?
(2)CanTrcv和EcuM的關系,在什么場景下CanTrcv會調用?
(3)不同類型的Can收發器主要使用場景是?
本文我們來一起探索并回答這些問題。
正文
1.CanTrcv_SetOpMode被哪個模塊調用,在什么場景下調用?
1.1 CanSM模塊切換CanTrcv模塊狀態
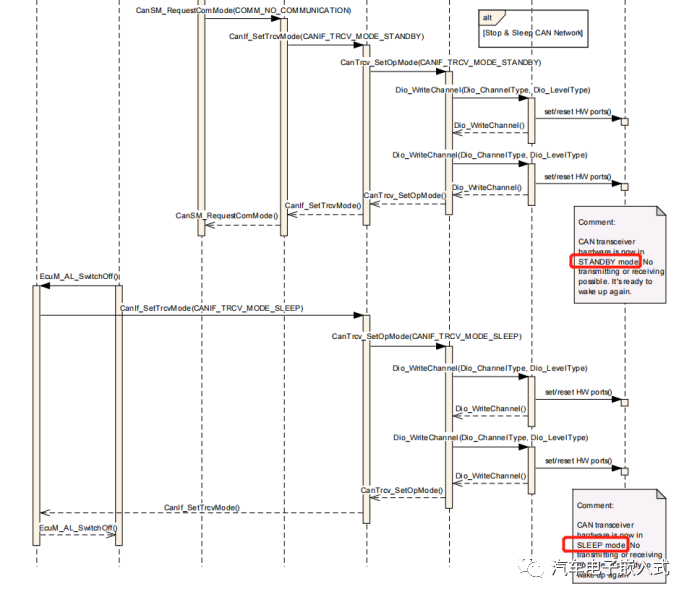
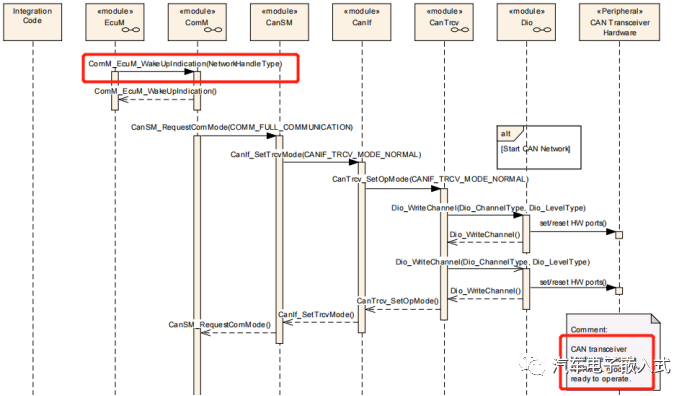
CanTrcv模塊在上電后的初始狀態配置,一般配置初始狀態為SLEEP狀態。而后,CanTrcv模塊的狀態通過其他模塊調用CanTrcv_SetOpMode來切換。如果沒有BswM的參與(Action中切換CanTrcv狀態),一般都是CanSM模塊調用CanIf_SetTrcvMode --> CanTrcv_SetOpMode來切換CanTrcv模塊的狀態。
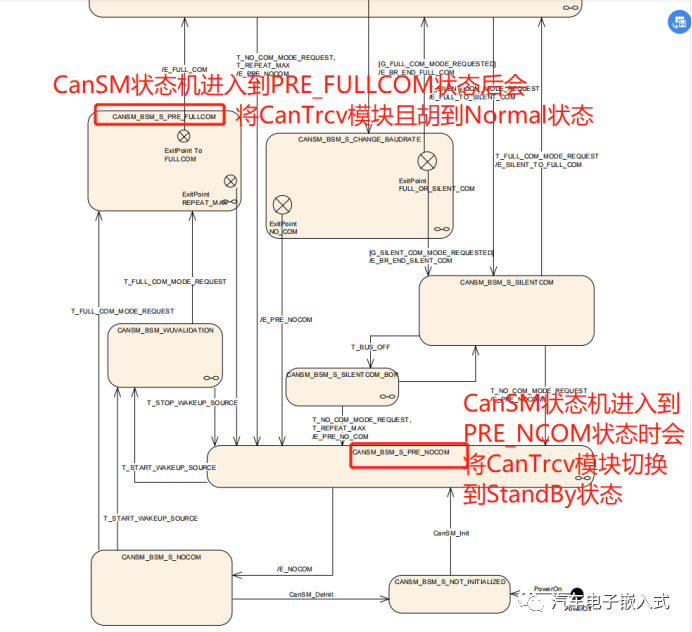
CanSM的CANSM_BSM_S_PRE_NOCOM和CANSM_BSM_S_PRE_FULLCOM兩個狀態會調用
CanIf_SetTrcvMode切換CanTrcv模塊的狀態。
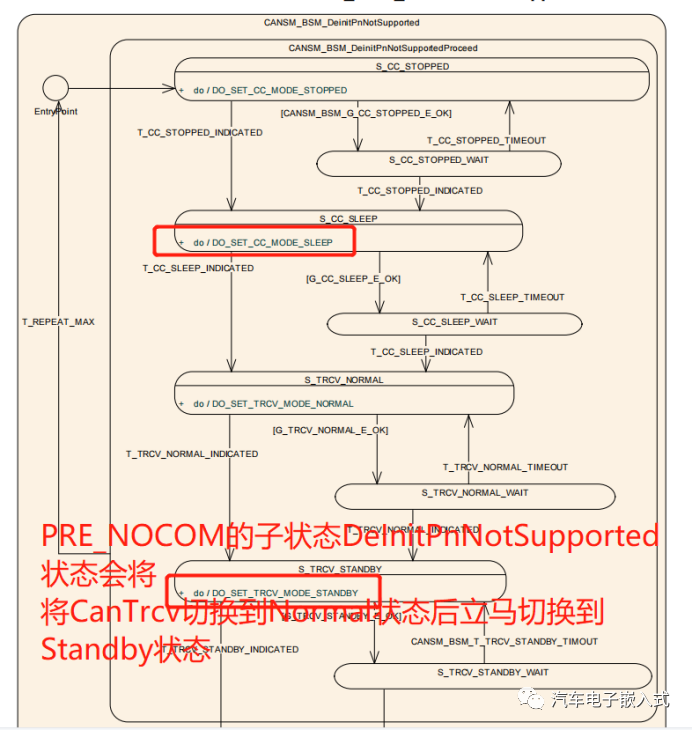
CANSM_BSM_S_PRE_NOCOM的子狀態CANSM_BSM_DeInitPnNotSupported會調用CanIf_SetTrcvMode將CanTrcv切換到Normal狀態后又立馬切換到StandBy狀態(Note: 不知道為啥有這個操作?)。
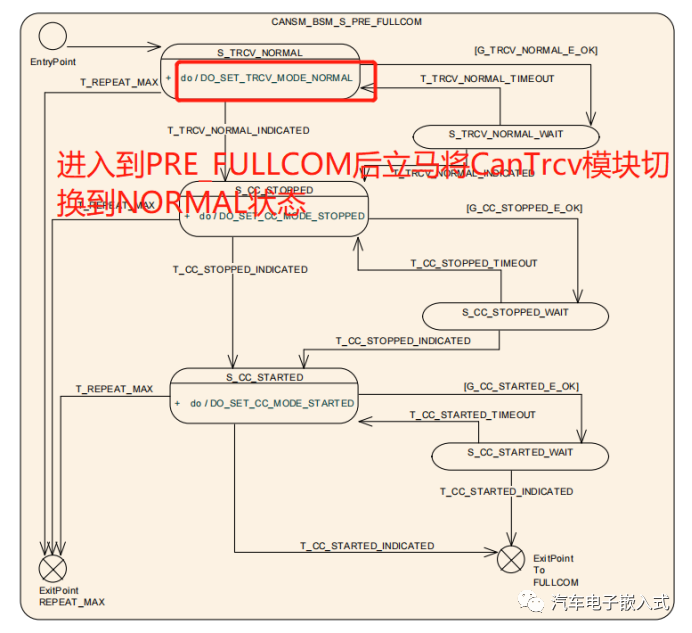
在CANSM_BSM_S_NOCOM狀態下如果檢查到有來自COM模塊的通信請求(T_FULL_COM_MODE_REQUEST)后會切換到CANSM_BSM_PRE_FULLCOM狀態,然后調用CanIf_SetTrcvMode將CanTrcv模塊狀態切換到NORMAL狀態。
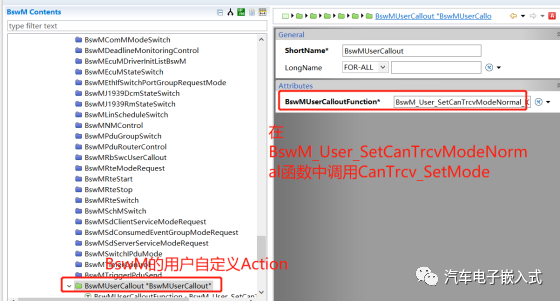
1.2 BswM的Action切換CanTrcv模塊的狀態
如果CanSM對CanTrcv的模式狀態管理不能滿足項目實際的需求,我們可以通過BswM設計在滿足特定條件下調用CanTrcv_SetOpMode來快速切換CanTcv模式狀態。
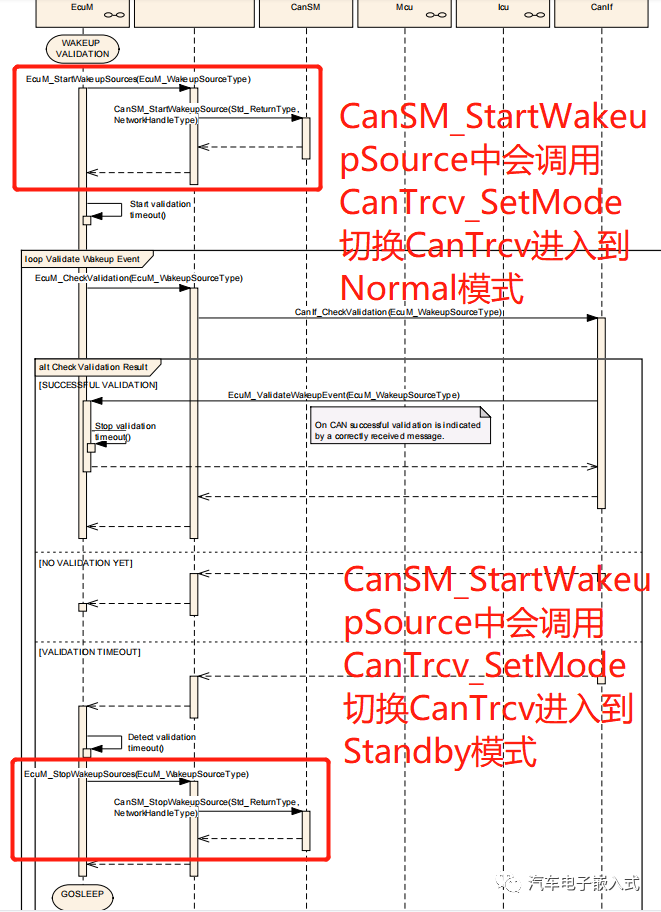
1.3 EcuM的Callout函數中切換CanTrcv模塊的狀態
EcuM通過中斷或輪詢檢測到來自CAN收發器或控制器的喚醒事件后,就可以對該喚醒事件進行驗證。EcuM通過打開相應的CAN收發器和控制器來實現喚醒事件驗證。EcuM模塊調用集成代碼EcuM_StartWakeupSource來打開相應的CAN收發器和控制器。
注意:雖然控制器和收發器已打開,但CAN接口模塊(CanIf)不會將CAN消息轉發到任何上層模塊。只有當CanIf對應的PDU通道模式設置為“在線”時,才會轉發CAN消息。
ECU狀態管理器模塊將通過通信管理器模塊ComM繼續正常啟動CAN網絡。否則,它將調用EcuM_StopWakeupSources關閉CAN控制器和收發器。
2.CanTrcv和EcuM的關系,在什么場景下CanTrcv會調用EcuM_SetWakeupEvent?
在回答這個問題前,先介紹一下ECU系統設計相關的一些知識。
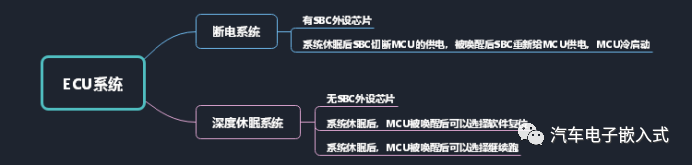
ECU在設計時根據具體需求可以在硬件上添加SBC或無SBC。如果ECU有SBC,ECU就是一個斷電系統。那么ECU在系統下電(Shutdown)流程的最后一步會調用SBC的服務接口斷掉MCU的電,整個MCU在休眠中是處于斷電狀態的。在外部信號(Can Transceiver/Lin Transceiver的INH引腳,Dio喚醒引腳 )喚醒MCU時,SBC重新給MCU供電,MCU重新冷啟動。
如果ECU無SBC,ECU就是一個深度休眠系統。那么ECU在系統下電(Shutdown)流程的最后一步會調用MCU的服務進入到Deep Sleep深度休眠狀態(MCU陷入深度休眠狀態,程序不在運行,但是MCU還有電存在)。在外部信號(Can Transceiver/Lin Transceiver的INH引腳,Dio喚醒引腳 )通過中斷喚醒MCU,MCU被喚醒后,程序可以選擇軟件復位,整個軟件重新運行,也可以選擇從上次停止的地方接著運行。
如果是深度休眠系統且ECU被喚醒后接著跑的話,我們可以通過配置(EcuM中enable sleep support,EcuM實現EcuM_EnbaleWakeupSource集成代碼,中斷函數中調用EcuM_CheckWakeup)最后在CanTrcv_CheckWakeup函數中調用EcuM_SetWakeupEvent來實現喚醒源檢測。
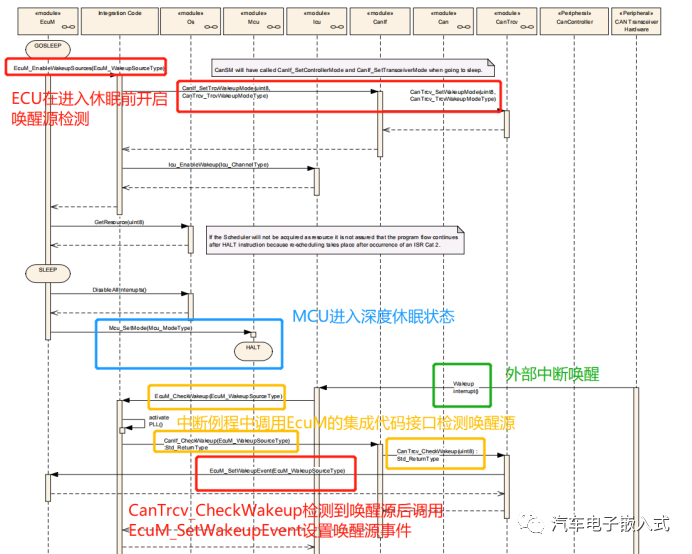
如果是斷電系統或者深度休眠系統被喚醒后軟件復位,那么上圖的整個交互過程就不存在了。程序重啟后需要在其他設計的模塊(CDD_WKSM)開啟喚醒源檢測,如果檢測到喚醒源就需要調用EcuM_SetWakeupEvent來設置喚醒源事件。
問題:CanTrcv和EcuM的關系,在什么場景下CanTrcv會調用EcuM_SetWakeupEvent?
答:如果是休眠系統且ECU被喚醒后繼續跑,則CanTrcv需要進行喚醒源檢測并調用EcuM_SetWakeupEvent設置喚醒源事件。如果是斷電系統,或者休眠系統且ECU被喚醒后軟件復位,則CanTrcv不用做喚醒源檢測,也不會調用EcuM_SetWakeupEvent設置喚醒源事件,需要自定義起碼模塊是西安喚醒源檢測。
3.不同類型的Can收發器主要使用場景是?
生產CAN收發器的廠商比較有名是NXP,Infineon,TI等,類型很多,收發器支持的功能也不近一樣。這里介紹NXP的三種比較有代表性的收發器,TJA1044,TJA1043,TJA1145。
| 是否有STB引腳 | 是否有EN引腳 | 是否有INH引腳 | 是否有SPI引腳 | 是否支持PN局部網絡管理 | 使用場景 | |
| TJA1044 | Y | N | N | N | N | 休眠系統,任意CAN報文在CAN_RX引腳上產生中斷喚醒 |
| TJA1043 | Y | Y | Y | N | N | 斷電系統,任意報文喚醒收發器,INH接到SBC |
| JTA1145 | N | N | N | Y | Y | 局部網絡管管理,特定報文喚醒收發器,INH引腳接到SBC |
TJA1044收發器相比基礎版本增加了standby的低功耗模式,此模式的功耗在10uA左右。同時CAN收發器處在standby模式時會開啟CAN總線喚醒功能,當CAN總線上有數據時,RXD會產生從高到低的跳變沿,此跳變沿可以被MCU用來做喚醒源。此種收發器一般用在KL30(長電)和KL15同時供電的產品上,如儀表,中控,導航等產品。
Standby模式下的功耗已經很低了,如果車廠要求功耗做的更低,或者要求支持本地喚醒,此時就需要使用帶sleep模式,INH引腳和wake引腳的收發器了。以TJA1043為例,當MCU配置TJA1043進入sleep模式之后,INH引腳拉低,LDO關閉輸出,MCU關閉不消耗電流。當CAN總線有喚醒信號,或者wake引腳有跳變沿,INH引腳被拉高,LDO打開輸出,MCU啟動并配置TJA1043進入Normal模式接收CAN報文。傳統的VCU,BMS等產品就使用了此收發器。
像T-BOX這類應用,一般對低功耗的要求更嚴格,如果使用TJA1043這類收發器,一旦被和自己不相關的CAN報文喚醒之后,需要軟件進行判斷處理,盡快的再次進入休眠模式。此時就對CAN收發器提出了新的功能需求,既局部網絡喚醒功能,相關標準為11898-6:2013。NXP支持該功能的收發器為TJA1145,可以通過SPI接口配置喚醒報文的速率,ID和數據,不滿足條件的CAN報文無法喚醒TJA1145。
需要提醒的是,TJA1145不支持CAN FD的局部網絡喚醒功能,如果TJA1145被用于CAN FD總線中,需要選用TJA1145T/FD and TJA1145TK/FD,其他型號接收到CAN FD的喚醒信號會識別為錯誤信號。
審核編輯:劉清
-
控制器
+關注
關注
112文章
16197瀏覽量
177395 -
PDU
+關注
關注
0文章
93瀏覽量
16963 -
CAN收發器
+關注
關注
2文章
164瀏覽量
25606
原文標題:關于CanTrcv模塊的幾點思考
文章出處:【微信號:汽車電子嵌入式,微信公眾號:汽車電子嵌入式】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
如何查看及更改函數/函數塊的調用環境

很贊的labview下調用地圖
求Labview 下調用Fortran dll的詳細教程
Zigbee場景調用設備沒響應?
通過調用HID.dll編寫USB HID的數據讀寫,請大神們幫忙提示一下調用哪些HID的原型函數及函數調用順序!
當函數執行完畢后,如何返回調用處?
Linux下系統調用的技巧
JLinkScript文件基礎及其在IAR下調用方法的PDF文件

malloc在Linux上執行的是哪個系統調用





 工商網監
工商網監
評論