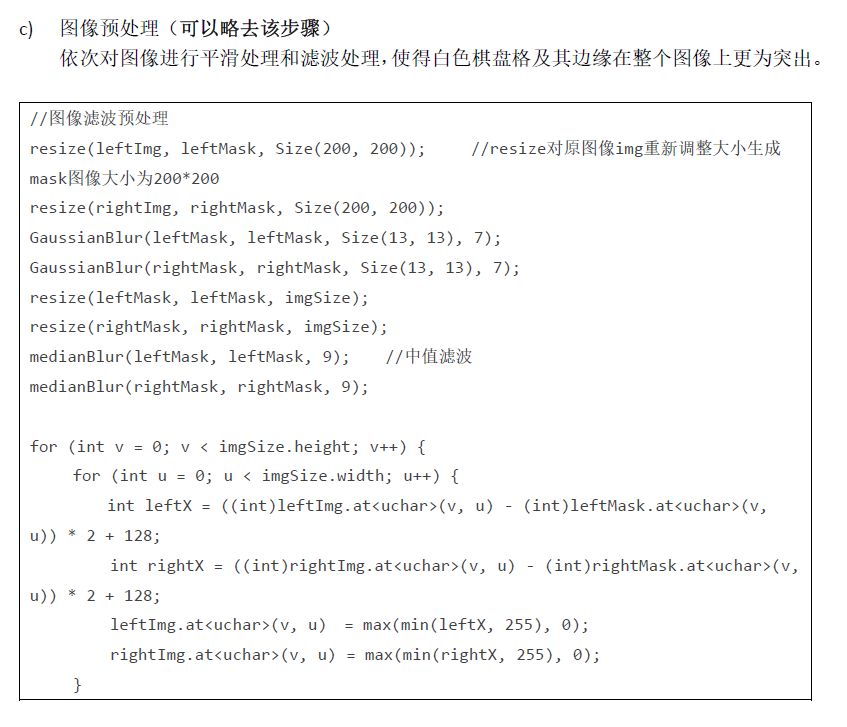
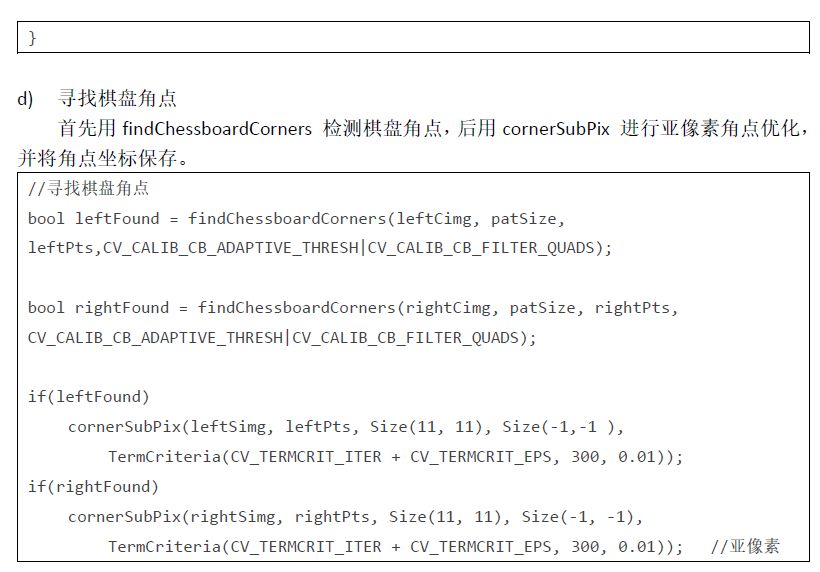
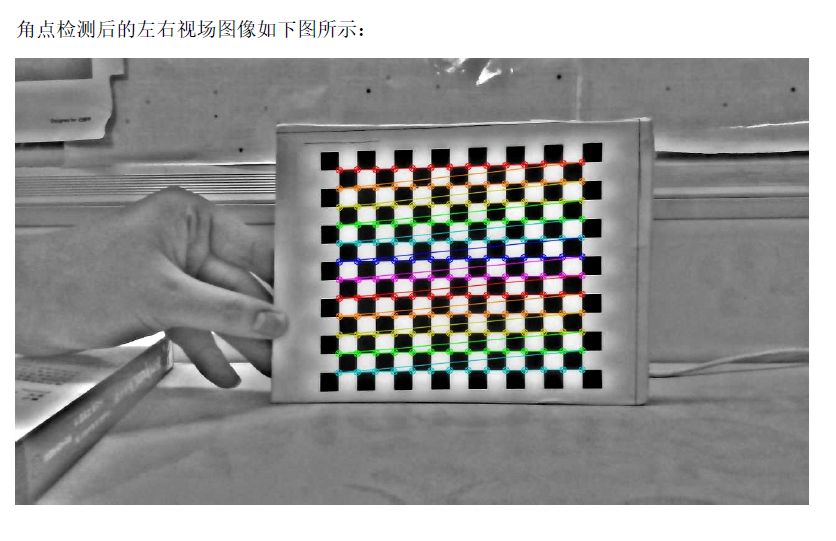
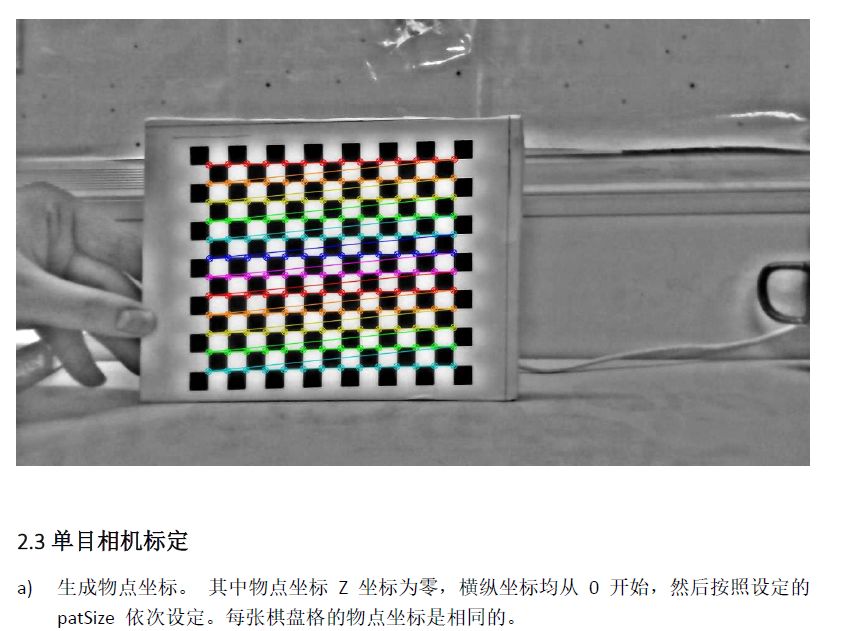
") 雙目視覺測距的基本原理
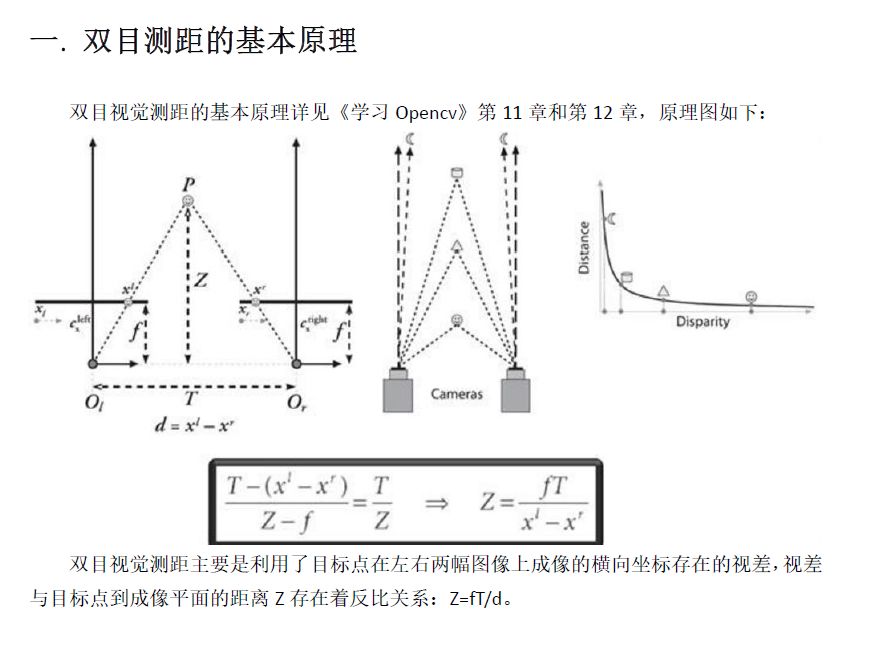
雙目視覺測距的基本原理



審核編輯:彭靜
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
雙目視覺
+關(guān)注
關(guān)注
2文章
34瀏覽量
14181
原文標(biāo)題:【光電制造】opencv雙目視覺標(biāo)定、匹配和測量
文章出處:【微信號:今日光電,微信公眾號:今日光電】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
基于SoC的雙目視覺ADAS解決方案
相比于單目視覺,雙目視覺(Stereo Vision)的關(guān)鍵區(qū)別在于可以利用雙攝像頭從不同角度對同一目標(biāo)成像,從而獲取視差信息,推算目標(biāo)距離。
發(fā)表于 11-05 03:46
?3247次閱讀
雙目立體視覺原理大揭秘(一)
理解了雙目視覺的基本原理,以上應(yīng)用都是大同小異的事情。本文僅從“基于雙目視覺的導(dǎo)航、定位”方面講述其基本原理及實現(xiàn)過程。雙目視覺的
發(fā)表于 11-21 16:20
雙目立體視覺原理大揭秘(二)
。基于雙目立體視覺的三維重構(gòu)其基本原理也是模擬人眼并利用空間幾何模型推導(dǎo)出相應(yīng)的算法來解決實際問題。本文以服裝設(shè)計中關(guān)于人體輪廓還原案例做一說明。為了便于理解,本文僅說明案例中一個視角的雙目
發(fā)表于 11-21 16:22
【W(wǎng)RTnode2R申請】雙目視覺隨動平臺
申請理由:之前用wrtnode的u***接雙攝像頭外加一個么mcu實現(xiàn)過一個一個雙目視覺隨動平臺,這樣太麻煩了,希望能用這個來實現(xiàn)一個更簡單的解決方案。項目描述:u***接雙攝像頭,mcu控制云臺。通過WIFI將雙目視覺傳遞到手機(jī)進(jìn)行顯示,同時將手機(jī)的角度信息返回,控制云
發(fā)表于 09-10 11:25
基于SoC的雙目視覺ADAS解決方案
識別和測距,完成FCW(前方碰撞預(yù)警)等ADAS功能。雙目視覺測距的基本原理并不復(fù)雜,如圖2所示,P為目標(biāo)點,它在左右兩個相機(jī)(鏡頭中心分別為A和B)上的成像點分別為E和F,則P點在兩
發(fā)表于 08-12 15:15
LabVIEW雙目視覺 【轉(zhuǎn)載】
://mp.weixin.qq.com/s/kcecV6PNE92FB8ugSoV4tw雙目立體視覺系統(tǒng)使用兩只相機(jī)同步采集圖像,通過像素匹配獲得深度圖像,進(jìn)而獲取三維點云,系統(tǒng)結(jié)構(gòu)如下。用下圖來解釋雙目視覺的
發(fā)表于 03-02 17:03
基于神經(jīng)網(wǎng)絡(luò)的雙目視覺傳感器建模
根據(jù)雙目視覺傳感器的工作原理, 分析了影響測量精度的因素, 表明雙目視覺傳感器的物體空間坐標(biāo)與圖像坐標(biāo)之間存在復(fù)雜的非線性映射關(guān)系, 其數(shù)學(xué)模型無法用解析式精確地加以
發(fā)表于 07-10 15:53
?11次下載
雙目視覺立體匹配算法研究
雙日視覺是計算機(jī)視覺領(lǐng)域的一個重要組成部分。雙目視覺研究中的關(guān)鍵技術(shù)攝像機(jī)標(biāo)定和立體匹配一直是研究的熱點。本文由兩部分組成,分別對雙目視覺的算法和未標(biāo)定圖
發(fā)表于 08-14 16:41
?0次下載
雙目視覺傳感器的現(xiàn)場標(biāo)定技術(shù)
本文以遺視投影變換為依據(jù),針對多視覺傳感器檢測系統(tǒng)中的雙目視覺傳感器,建立了雙目視覺傳感器測量空間三維坐標(biāo)的模型.事先確定攝像機(jī)的部分不易變化的參數(shù),其它參數(shù)在攝
發(fā)表于 03-02 16:02
?15次下載

一種基于圖像處理的雙目視覺校準(zhǔn)方法
雙目視覺是利用機(jī)器視覺進(jìn)行障礙物檢測的研究熱點。針對雙目視頻不同步,導(dǎo)致立體匹配不精準(zhǔn)的問題,提出了一種基于圖像處理的雙目校準(zhǔn)算法。算法首先根據(jù)道路的先驗特征模型,建立
發(fā)表于 12-18 16:26
?34次下載
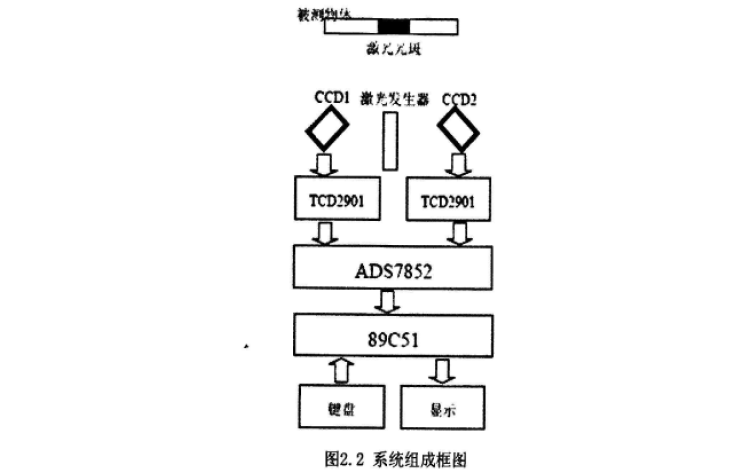
使用雙目立體視覺實現(xiàn)CCD測距系統(tǒng)設(shè)計的資料說明
的CCD測距技術(shù)。雙目立體視覺的基本原理是模仿人眼與人類視覺的立體感知過程,從兩個視點觀察同一景物,以獲取不同視角下的感知圖像,通過三角測量
發(fā)表于 11-26 12:05
?6次下載
雙目視覺簡介及算法一般流程
1.1. 雙目視覺簡介 雙目視覺廣泛應(yīng)用在機(jī)器人導(dǎo)航,精密工業(yè)測量、物體識別、虛擬現(xiàn)實、場景重建,勘測領(lǐng)域。 什么是雙目視覺? 雙目視覺是模擬人類視
雙目視覺深度檢測的測距原理
雙目測距的原理就說到這里,為了避免大家看到大段純敘述性的文字頭暈,下面的行文將會以FAQ的形式圍繞著實現(xiàn)雙攝像頭測距過程中碰到的幾點疑惑展開。
發(fā)表于 04-26 16:47
?5492次閱讀

雙目立體視覺是什么?單目視覺與雙目立體視覺的區(qū)別?
雙目更多的是基于物理測量,而單目視覺則是基于邏輯推理,通過大量的數(shù)據(jù)訓(xùn)練,先識別出目標(biāo),再根據(jù)目標(biāo)的大小和高度估算距離。因此,單目視覺的漏檢率高于雙目立體
發(fā)表于 08-17 09:40
?3656次閱讀






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論