") 自動(dòng)緊急制動(dòng)系統(tǒng)行人測(cè)試場(chǎng)景的研究
自動(dòng)緊急制動(dòng)系統(tǒng)行人測(cè)試場(chǎng)景的研究
一、自動(dòng)緊急制動(dòng)系統(tǒng)行人測(cè)試場(chǎng)景的研究
主要內(nèi)容:利用聚類分析對(duì)采集的上海道路54例典型行人危險(xiǎn)工況進(jìn)行分析,得到了5類具有典型特征的危險(xiǎn)場(chǎng)景,并將前四類用于AEB行人測(cè)試場(chǎng)景的設(shè)計(jì)。
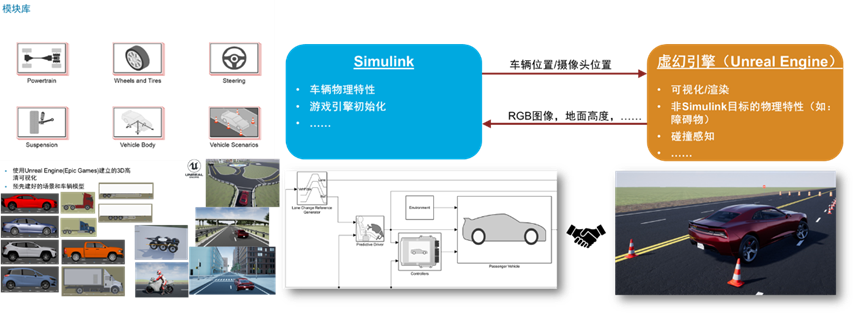
數(shù)據(jù)獲得及驗(yàn)證:行車記錄儀((VIDEO drive recorder,VDR).在縱向或側(cè)向加速度絕對(duì)值大于0.4g時(shí)觸發(fā),只記錄觸發(fā)前15s到觸發(fā)后5s的數(shù)據(jù),Prescan建模。
創(chuàng)新點(diǎn):采用了中國(guó)上海的道路數(shù)據(jù),更符合中國(guó)典型道路特征
局限和我的思考:因?yàn)闃颖緮?shù)量少和實(shí)際場(chǎng)景中發(fā)生的概率低,將第五類轉(zhuǎn)彎且視野被遮擋的工況刪除,從現(xiàn)在自動(dòng)駕駛角度來看,這類稀有事件對(duì)于自動(dòng)駕駛的進(jìn)化是非常有用的,不應(yīng)該刪除。
學(xué)習(xí)知識(shí)點(diǎn):聚類分析
1、參數(shù)選擇:差異不明顯的不用于聚類;參數(shù)間存在關(guān)聯(lián)性的選擇更本質(zhì)的參數(shù)。
2、距離計(jì)算:
(1)變量之間:間隔尺度(連續(xù)的量)與有序尺度(等級(jí))參數(shù)的距離是差值的絕對(duì)值;名義尺度(類)參數(shù),變量取值相同時(shí)距離為0,變量取值不同時(shí)距離為1。
(2)樣本之間:采用絕對(duì)值距離。
(3)類之間:類平均法即, 即類與類之間距離的平方是樣本對(duì)之間距離平方的平均值。用MATLAB實(shí)現(xiàn)。
借鑒:
1、場(chǎng)景參數(shù)的選擇:
(1)環(huán)境參數(shù):天氣、照明情況、交通狀況、道路形狀等;
(2)測(cè)試車輛參數(shù):車的運(yùn)動(dòng)情況、視野是否有遮擋、遮擋類型、遮擋位置、 危險(xiǎn)起始點(diǎn)和結(jié)束點(diǎn)的時(shí)間、 測(cè)試車輛速 度、測(cè)試車輛與行人的距離等;
(3)行人參數(shù)指行人的運(yùn)動(dòng)情況、速度和類型。
2、幾個(gè)數(shù)據(jù)庫
歐洲的vFSS、AEB Group設(shè)計(jì)的AEB行人測(cè)試場(chǎng)景。
3、分類方法
NHTSA提出的37類預(yù)碰撞場(chǎng)景分類方法。
二、涉及騎車人的典型交通危險(xiǎn)場(chǎng)景
主要內(nèi)容:對(duì)上海地區(qū)采集到的152例涉及騎車人(自行車、摩托車、電動(dòng)助力車)的危險(xiǎn)工況進(jìn)行聚類分析和卡方檢驗(yàn)得到了7類典型的危險(xiǎn)場(chǎng)景.并使用PRESCAN對(duì)7類場(chǎng)景進(jìn)行虛擬建模,得到了涉及騎車人的典型危險(xiǎn)工況場(chǎng)景庫。
創(chuàng)新點(diǎn):目前對(duì)主動(dòng)安全系統(tǒng)測(cè)試場(chǎng)景的研究都集中在車與車沖突以及車與行人沖突,但在中國(guó)由騎車人導(dǎo)致的交通事故占交通事故總數(shù)的比例相當(dāng)大(2011占27.09%)
借鑒:7種分類場(chǎng)景:
(1)照明情況(好/不好);(2)本車運(yùn)動(dòng)狀態(tài)(直行/轉(zhuǎn)向);(3)目標(biāo)車有無遮擋(有/無);(4)危險(xiǎn)起始點(diǎn)本車速度(5)目標(biāo)車類型(摩托車或電動(dòng)助力車/自行車);(6)目標(biāo)車運(yùn)動(dòng)狀態(tài)(沿公路行駛、從左側(cè)過公路、從右側(cè)過公路);(7)道路特征(路口、非路口)。
審核編輯:劉清
-
制動(dòng)系統(tǒng)
+關(guān)注
關(guān)注
0文章
125瀏覽量
15790 -
行車記錄儀
+關(guān)注
關(guān)注
15文章
159瀏覽量
45675
原文標(biāo)題:基于場(chǎng)景的汽車安全研究(聚類分析)
文章出處:【微信號(hào):智能浪尖,微信公眾號(hào):智能浪尖】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
汽車制動(dòng)系統(tǒng)對(duì)安全性的影響
關(guān)于歐盟法規(guī)中測(cè)試場(chǎng)景的研究

智駕仿真測(cè)試實(shí)戰(zhàn)之自動(dòng)泊車HiL仿真測(cè)試

氣壓制動(dòng)系統(tǒng)和液壓制動(dòng)系統(tǒng)的優(yōu)缺點(diǎn)
電源自動(dòng)測(cè)試系統(tǒng)的技術(shù)原理和應(yīng)用場(chǎng)景
利用仿真技術(shù)進(jìn)行智能制動(dòng)系統(tǒng)的開發(fā)
電源測(cè)試設(shè)備——NSAT-8000自動(dòng)化測(cè)試系統(tǒng)在電源模塊測(cè)量中的應(yīng)用

英飛凌推出新一代CMOS級(jí)聯(lián)雷達(dá)
汽車ABS系統(tǒng)工作模式有哪些
傳感器性能大考驗(yàn)!美國(guó)啟動(dòng)AEB緊急制動(dòng)計(jì)劃
AEB安全性受關(guān)注,高速工況AEB何時(shí)能成為標(biāo)配?
汽車防抱死制動(dòng)系統(tǒng)ABS的分類有哪些
自動(dòng)駕駛測(cè)試場(chǎng)景深度解析

通用CPU性能基準(zhǔn)測(cè)試的研究現(xiàn)狀

淺談ADAS前置攝像頭設(shè)計(jì)挑戰(zhàn)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論