") 用HLS實(shí)現(xiàn)PID控制器
用HLS實(shí)現(xiàn)PID控制器
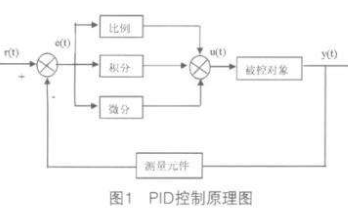
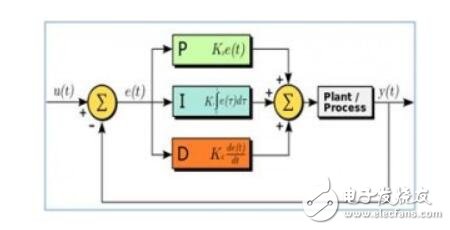
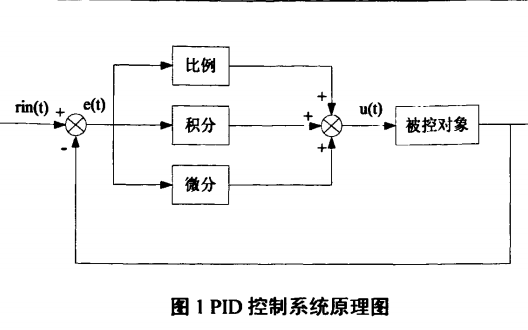
PID控制器(比例-積分-微分控制器),由比例單元(Proportional)、積分單元(Integral)和微分單元(Derivative)構(gòu)成,可以通過(guò)調(diào)整這三個(gè)單元的增益來(lái)調(diào)整其特性,如下圖所示。PID控制器主要適用于基本上線性且動(dòng)態(tài)特性不隨時(shí)間變化的系統(tǒng)。
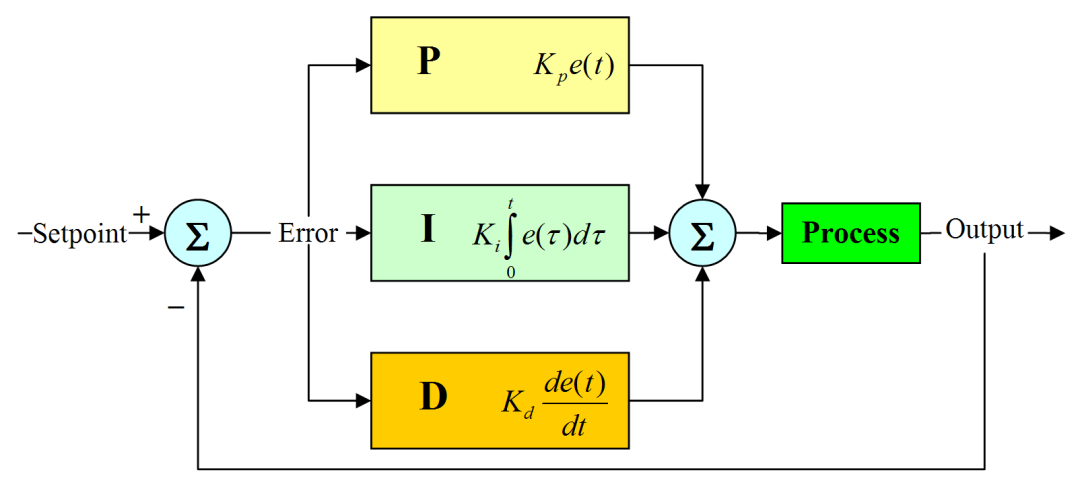
不難看出,PID控制器是一個(gè)帶有反饋支路的閉環(huán)系統(tǒng),這個(gè)控制器把收集到的數(shù)據(jù)和一個(gè)參考值進(jìn)行比較,然后根據(jù)此誤差值計(jì)算新的輸入值。這個(gè)新的輸入值的目的是讓系統(tǒng)的輸出數(shù)據(jù)達(dá)到或者保持在參考值。PID控制器可以根據(jù)歷史數(shù)據(jù)和誤差的出現(xiàn)率來(lái)調(diào)整輸入值,使系統(tǒng)更加準(zhǔn)確而穩(wěn)定。
從編程角度而言,我們需要知道參考值、初始輸出值、比例單元增益、積分單元增益和微分單元增益。但這還不夠,畢竟上圖顯示的是一個(gè)模擬系統(tǒng)而非離散化的數(shù)字系統(tǒng)。接下來(lái)我們看看如何對(duì)其進(jìn)行離散化處理。
比例控制單元
比例控制單元是PID控制器中最簡(jiǎn)單的部分,通過(guò)一個(gè)乘法操作即可完成。其物理意義在于“穩(wěn)”,即穩(wěn)定性,放大控制作用,表征的是粗調(diào)跟進(jìn)以快速地響應(yīng)被控對(duì)象和輸入的線性關(guān)系。
積分控制單元
如果僅用比例控制單元,那么系統(tǒng)就會(huì)出現(xiàn)穩(wěn)態(tài)誤差,因此,我們引入了積分控制單元。積分控制單元的傳遞函數(shù)可表示為(在z域)
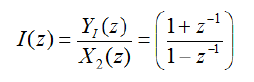
由此可得輸出和輸入的時(shí)域表達(dá)式為

不難看出,積分的離散化實(shí)質(zhì)上就是累加。從物理角度而言,積分控制單元對(duì)于“準(zhǔn)”,其目的是消除穩(wěn)態(tài)誤差。
審核編輯:湯梓紅
-
控制器
+關(guān)注
關(guān)注
112文章
15885瀏覽量
175370 -
PID
+關(guān)注
關(guān)注
35文章
1466瀏覽量
84838 -
HLS
+關(guān)注
關(guān)注
1文章
128瀏覽量
23915
原文標(biāo)題:用HLS實(shí)現(xiàn)PID控制器
文章出處:【微信號(hào):Lauren_FPGA,微信公眾號(hào):FPGA技術(shù)驛站】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于FPGA的模糊PID控制器的設(shè)計(jì)實(shí)現(xiàn)
基于MBP算法的PID控制器設(shè)計(jì)
基于FPGA實(shí)現(xiàn)PID控制器的研究
pid控制器原理

基于BP神經(jīng)網(wǎng)絡(luò)的PID控制器的研究與實(shí)現(xiàn)

直流調(diào)速系統(tǒng)的模糊PID控制器設(shè)計(jì)實(shí)現(xiàn)
快速浮_定點(diǎn)PID控制器FPGA的研究與實(shí)現(xiàn)
pid控制器的輸入輸出_PID控制器的控制實(shí)現(xiàn)
PID控制器控制電壓的詳細(xì)介紹和PID控制器的C程序的概述
pid控制器工作原理
PID控制的理論和PID控制器設(shè)計(jì)的及PID控制器參數(shù)整定的以及分析





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論