 AI與邊緣計算加持,是時候深入了解機器人了
AI與邊緣計算加持,是時候深入了解機器人了
成長計劃
從機器狗到仿生機器人,從掃地機器人到無人駕駛出租車。各種各樣的清潔機器人,送貨機器人已經融入人們的生活,并且創造了巨大的商業價值。
在高性能邊緣計算芯片和人工智能的加持下,機器人,正在從實驗室走向商業落地。對于工程師而言,抓住機器人領域的快速發展的機會,才能立于不敗之地。
硬聲UP主:魚香ROS
大綱:
開發環境準備;
虛擬機與ROS2安裝;
ROS2基礎概念;
ROS2節點;
ROS2功能包;
編譯工具介紹與安裝;
ROS2通訊接口介紹;
數據可視化工具介紹;
……共95講
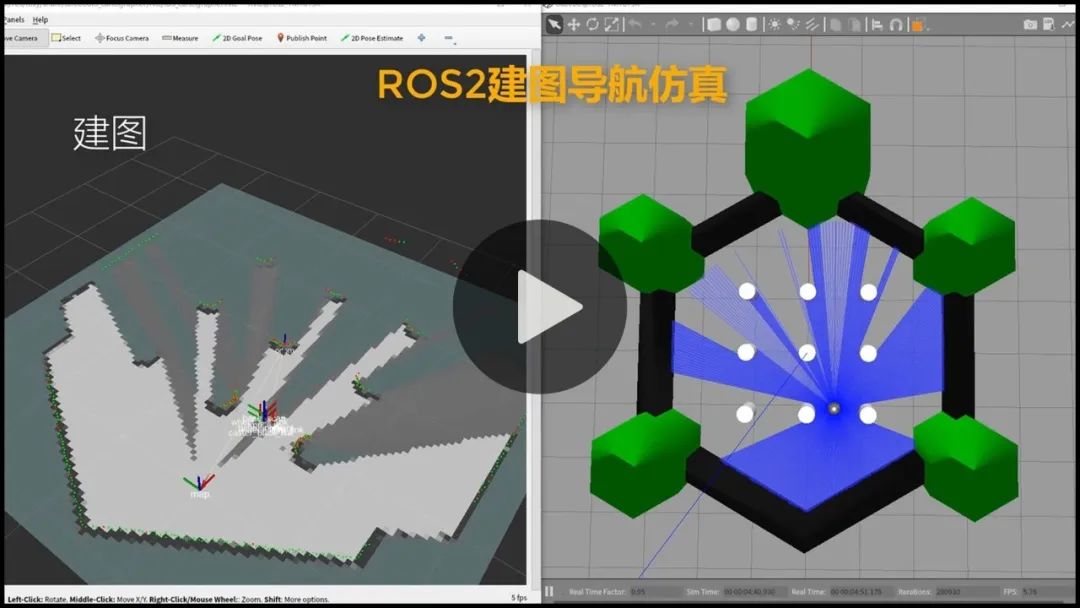
ROS2進階篇 | 機器人學基礎|機器人建模與仿真

硬聲UP主:魚香ROS
大綱:
常見矩陣定義與運算;
安裝Miniconda與Jupyter;
使用numpy定于矩陣與運算;
空間位姿描述介紹;
旋轉矩陣與位置矢量;
使用numpy進行位姿變換;
……共15講
開源六足機器人功能介紹和運動測試
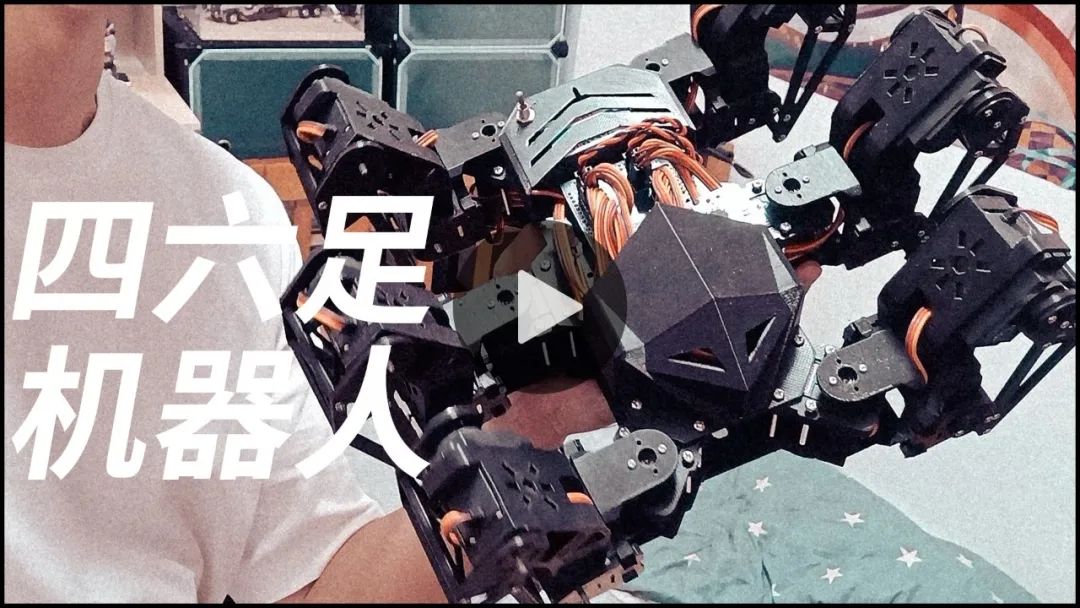
硬聲UP主:LeeSophia_智造師
大綱:
Pyhon代碼結構、舵機較準流程及控制界面
足式機器人步態編程基礎介紹
六足機器人功能介紹和運動測試
用Python寫一個步態動畫展示程序
使用樹莓派和Python驅動的六足機器人
……共7講
使用 ROS 控制舵機機器臂自動拾取和放置
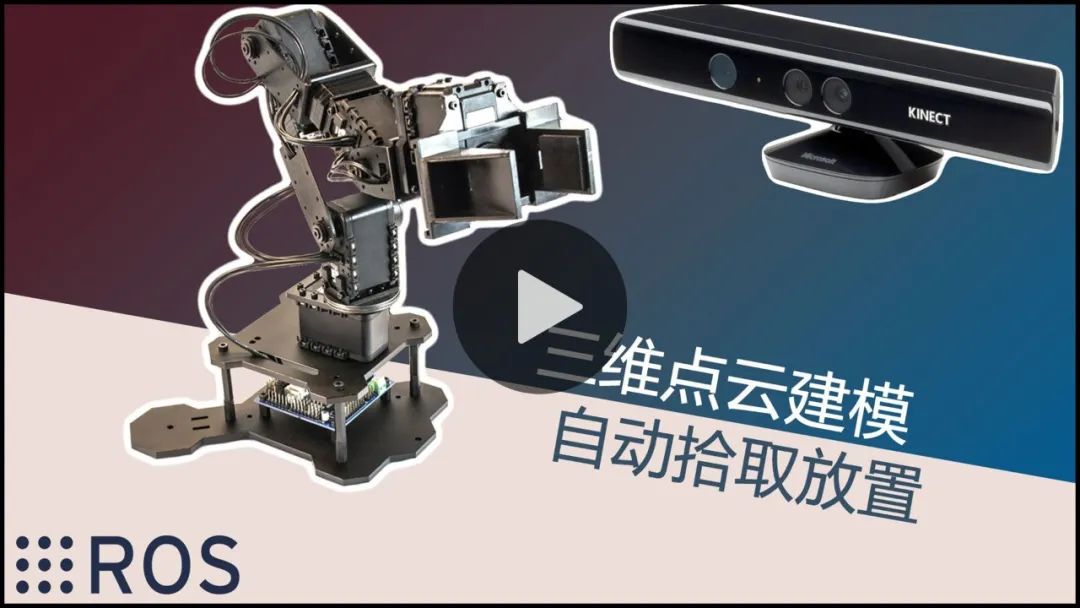
硬聲UP主:LeeSophia_智造師
介紹:ROS代碼和機器臂運動演示,但其實涉及執行 Pick and Place 任務的主要思想,包括視覺感知和坐標變換、機器臂正逆運動學、運動規劃等。必須時刻記住自主機器人的三個特性:感知、決策和執行。

硬聲UP主:薪盡火傳
大綱:
使用MATLAB設計機械臂算法
仿真平臺,運動學,運動規劃
軌跡跟蹤仿真
機械臂倉庫運輸仿真
視覺控制教程
十分鐘掌握機器人運動學|理論和仿真講解
路徑規劃_RRT算法原理+源碼
基于OMPL的運動規劃介紹與教程
……共29講
六自由度stewart軌跡控制實驗

硬聲UP主:ZSH實驗室
介紹:Stewart動態平臺,可用于賽車和飛行模擬
,使用STM32和總線舵機控制。
小到U盤,大到石頭,萬物可抓的平面抓取檢測算法
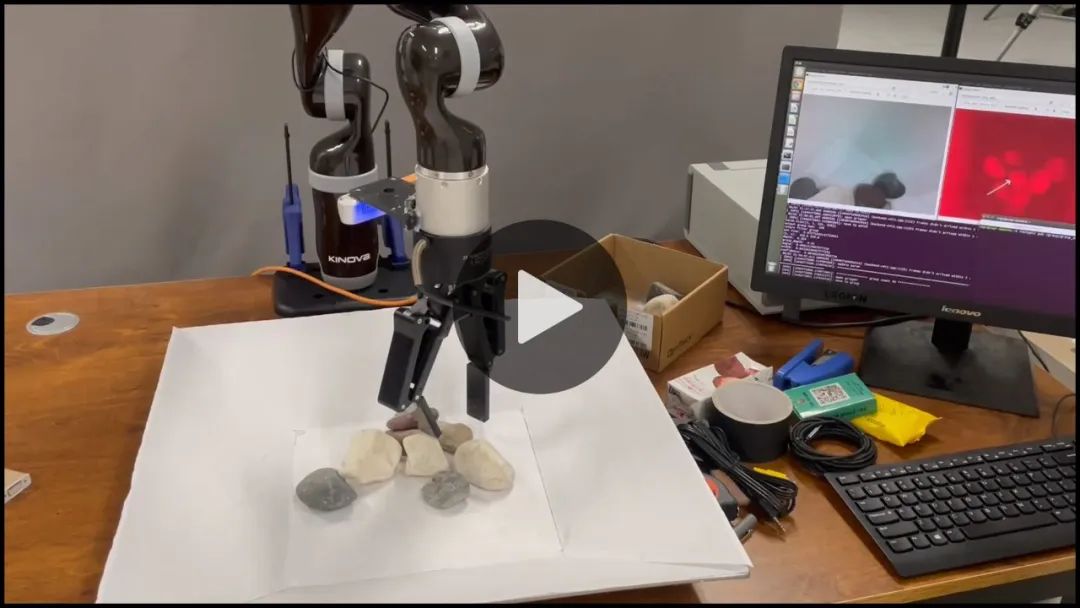
硬聲UP主:wangdx機器人
介紹:
使用realsense d435i相機,夾爪使用robotiq 2F-140,相機離物體40cm。
-
機器人
+關注
關注
210文章
28191瀏覽量
206505 -
工程師
+關注
關注
59文章
1566瀏覽量
68439 -
AI
+關注
關注
87文章
30106瀏覽量
268399 -
仿生機器人
+關注
關注
1文章
70瀏覽量
15214 -
邊緣計算
+關注
關注
22文章
3063瀏覽量
48626
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論