 你了解PWM在無刷直流電機控制中的作用嗎
你了解PWM在無刷直流電機控制中的作用嗎
高功率無刷電機必須由PWM控制,并要求微控制器提供啟動和控制功能。
當選擇或開發使用脈寬調制(PWM)驅動無刷直流電機的電子設備時,運動控制系統設計人員經常會面臨挑戰。注意一些基本的物理現象,可以避免意外的性能問題。
本文為PWM驅動器與無刷直流電機配合使用提供了通用指導。
無刷直流電機的換向
有刷直流電機使用機械換向,無刷直流電機與此不同,采用電子換向。這意味著電機的相位,根據轉子相對于定子的位置依次通電和斷電。
對于三相無刷直流電機,驅動器由六個電子開關(通常為晶體管)組成,通常稱為三相H 橋(圖1)。此配置允許三個雙向輸出,為電機的三相通電。
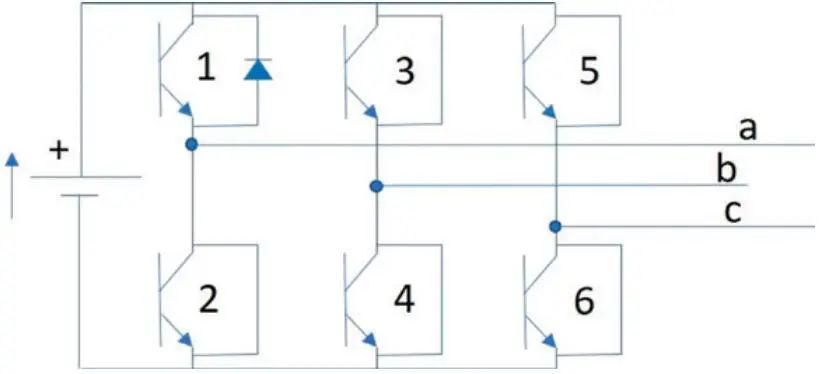
▎圖 1 :由六個晶體管組成的三相電機 H 橋,與三
個電機相位相連。
按特定順序打開和關閉晶體管,使電機各相通電,以確保定子與轉子磁鐵感應所產生的磁場保持最佳方向(圖2)。
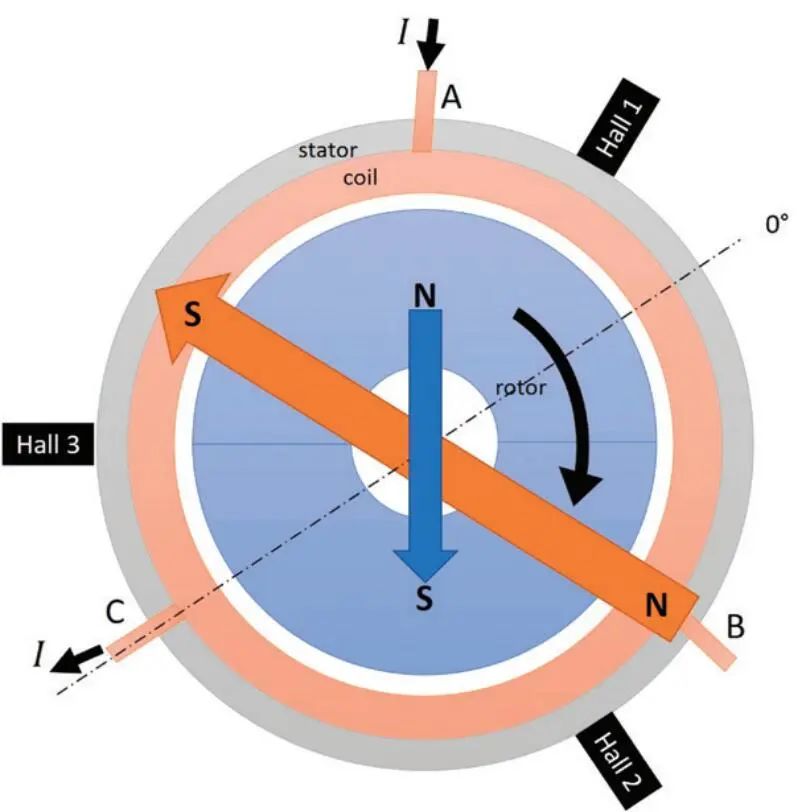
▎圖 2 :無槽無刷直流電機的橫截面示意圖。
藍色 區域是帶有兩極永磁體的轉子。磁鐵產生的磁場 由藍色箭頭表示。橙色區域為三相繞組。當電流 從 A 相流向 C 相時會產生磁場,由橙色箭頭表 示,以便于簡化。當兩個箭頭對齊時,轉子將旋 轉。驅動器變換相位(旋轉定子磁場,橙色箭頭), 以確保定子和轉子磁場之間盡可能保持 90 度(產 生最大扭矩)。
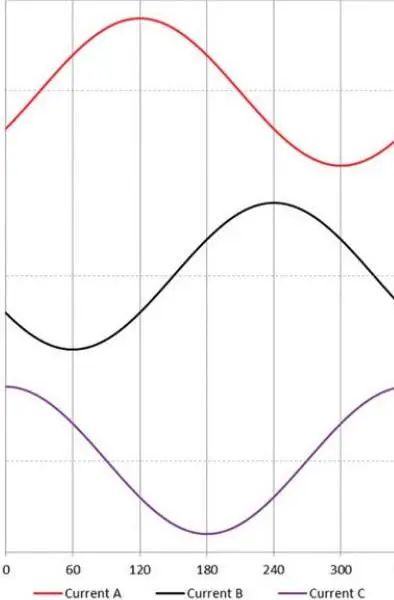
電機可以采用廣泛使用的六步梯形換向驅動(圖3),也可以通過操作實現更先進的矢量控制,也稱為磁場定向控制(FOC),具體取決于電子設備的復雜程度(圖4)。
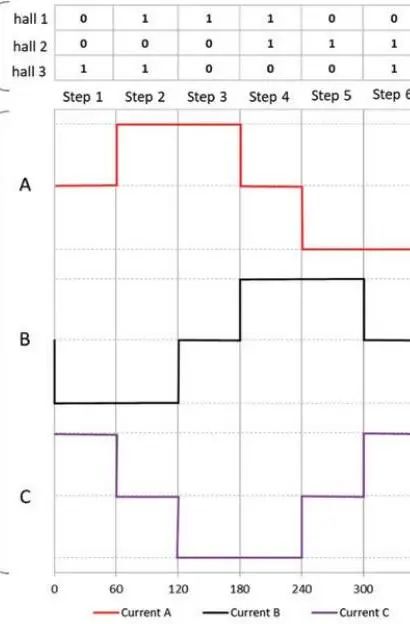
▎圖 3 :六步換向相電流和霍爾傳感器狀態。
圖 4 :使用 FOC 放大器的相電流。
無刷直流電機的PWM調節
在有刷或無刷直流電機中,應用的工作點(速度和扭矩)可能會有所不同。放大器的作用是改變電源電壓或電流,或兩者都改變,以實現期望的運動輸出(圖5)。
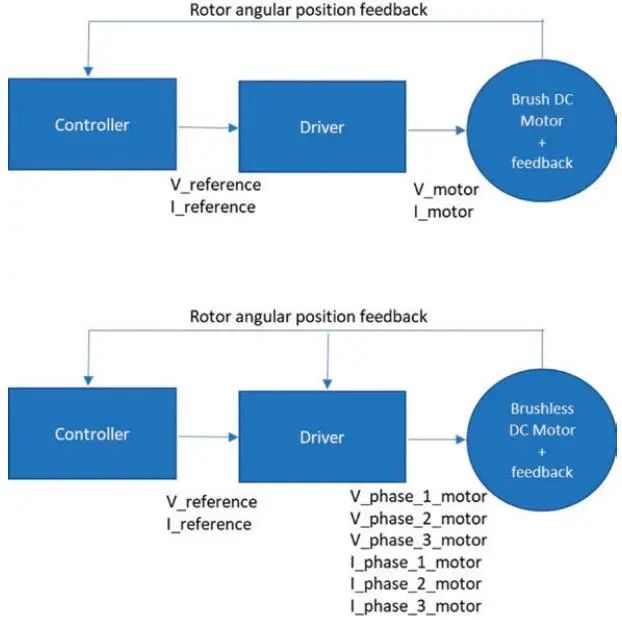
▎圖 5:有刷直流電機和無刷直流電機之間的運動控制架構比較。
改變電壓或電流通常有兩種不同的方式:
·線性放大器;
·斬波器放大器。
線性放大器通過改變電壓或電流,來調整傳遞給電機的功率。未輸送至電機的功率被耗散(圖6)。因此,需要一個大型散熱器來耗散功率,從而增大放大器的尺寸,使其更難以集成到應用中。
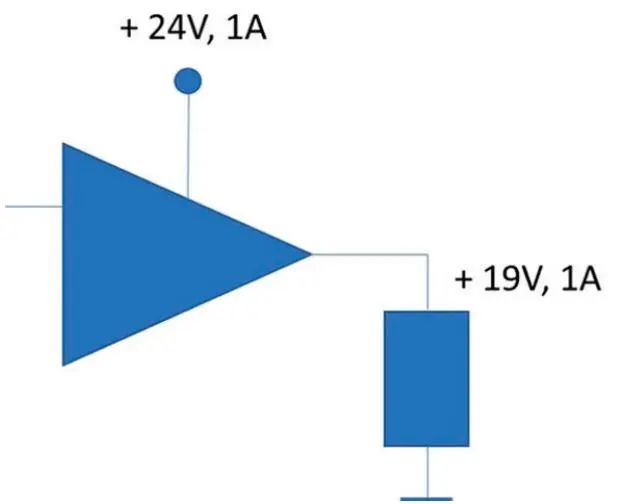
▎圖 6 :為電機供電的線性放大器示例。
斬波放大器通過打開和關閉功率晶體管來調節電壓(和電流)。它的主要優點是在晶體管關閉時可以節省電源。這有助于節省應用的電池壽命,減少電子設備產生的熱量,并允許使用尺寸更小的電子設備。大多數情況下,斬波放大器都使用PWM 方法。
PWM 方法包括在固定頻率下改變占空比(圖7),以將電壓或電流調整到期望的目標值內。請注意,與其它方法相比,PWM 斬波電流的一個優點是開關頻率是一個固定參數。這
使得電子設計師更容易過濾電磁噪聲。
當PWM 晶體管占空比為100% 時,施加到電機上的電壓為母線電壓。當晶體管占空比為50% 時,施加在電機上的平均電壓為母線電壓的一半。當晶體管占空比為0% 時,不會向電機施加電壓。
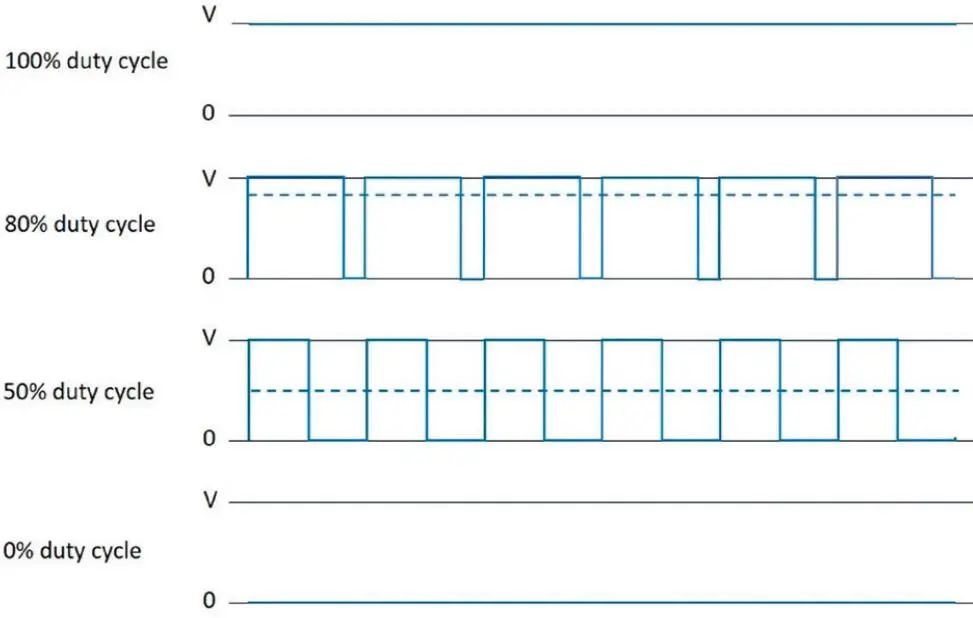
▎圖 7 :不同的 PWM 占空比。所有工況下的頻率都是相同的,而平均電壓(虛線)與占空比成比例。
無刷直流電機的電感效應
直流電機的特點是電感L、電阻R 和反電動勢E 串聯。反電動勢是由磁感應(法拉第- 楞次感應定律)產生的電壓,它與施加的電壓相反,并且與電機速度成正比。圖8 顯示了PWM 接通和PWM 斷開時的電機。
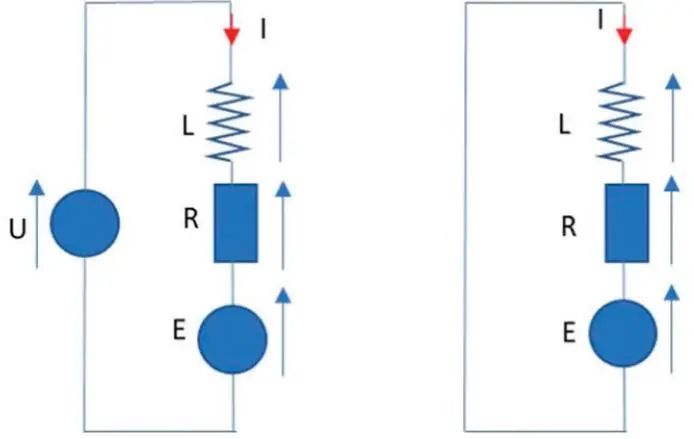
▎圖 8:PWM 接通(左)和斷開(右)時,直流電機的簡化等效 電路圖。為簡單起見,右側電路對應于慢衰減模式(電機中 的電流再循環)。
現在,為了簡單起見,我們不考慮反電動勢。當向R L 電路施加電壓或切斷電壓時,電感器將阻止電流的變化。向R L 電路施加電壓U,電流將遵循一階指數上升,其動態取決于由L / R 比決定的電時間常數τ(圖9)。在經過5 倍時間常數后,它將逐漸達到穩態值,即99.7%的U/R。
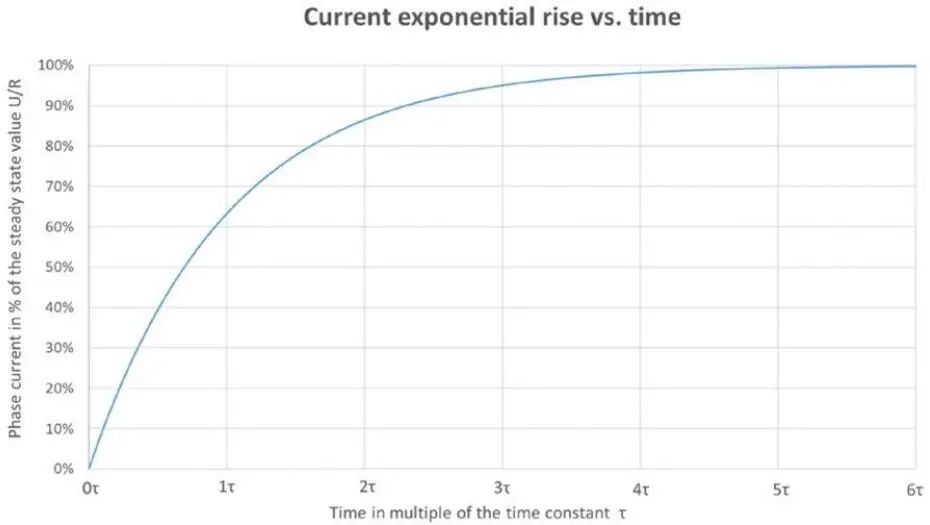
▎圖 9:RL 電路中的電流按指數規律上升。
當R L 電路放電時,將觀察到相同的指數行為。實際上,無刷直流放大器具有相當高的PWM 頻率,電流不容易達到穩態。該頻率通常高于50 k H z,因此在每個換相步驟中,有足夠的周期對電流進行適當調制。
對于50k H z 的PWM 頻率,關閉和打開晶體管的周期時間等于20μs。考慮到六步換向,一個以40000 r p m(667H z)運行的單極對電機的一次換向時間,需要250μs。這樣,在一步換向期間,至少有250/20=12.5 個PWM 周期。
無刷直流電機的電氣時間常數τ 為幾百微秒。因此,在每個PWM 周期內,電流將有時間作出反應。但是,機械時間常數在幾毫秒范圍內,因此機械時間常數和電氣時間常數之間的系數為10。
因此,當電壓以典型PWM頻率切換時,電機轉子本身沒有足夠的時間響應。幾千Hz 的低PWM 頻率可能會導致轉子振動和可聽見的噪音。建議使用高于可聽頻率的頻譜,即至少高于20 kHz。
無刷直流電機PWM 的限制
PWM 將導致每個周期的電流上升和下降。電流最小值和最大值之間的變化稱為電流紋波。高電流紋波可能會導致問題。建議將其保持在盡可能低的水平。電機轉矩需要考慮平均電流。平均電流取決于占空比,與電流紋波無關。
與有刷直流電機不同,無刷直流電機沒有電刷。高電流紋波對壽命本身沒有影響。電流波動會對電機損耗產生很大影響,產生不必要的熱量。電流紋波將產生兩類損耗:
焦耳損耗。電流紋波將增加均方根(R M S)電流值,這是焦耳損耗計算中考慮的。紋波將產生額外的熱量,但不會增加平均電流,因此不會增加扭矩。請注意,它是RMS 電流函數變化的平方。
鐵損耗。根據法拉第電磁感應定律,導電材料中磁場的變化將產生電壓,然后產生被稱為渦流的電流回路。鐵損耗與電機速度的平方和電機電流的平方成正比。根據實際測量,當電流紋波較大時,產生的額外鐵損耗會顯著增加。因此,保持電流紋波盡可能低非常重要。
最小化電流紋波的建議
我們可以制定一些建議,以盡量減紋波:
降低或調整電源電壓。電流紋波與電源電壓成比例。高電壓,有助于到達需要高速或更高功率的極端工作點。然而,如果應用不需要高速或高功率,則較低的電源電壓將有利于降低電流紋波。在相同負載點下,以較低電壓運行也會增加占空比,這將進一步降低電流紋波。務必將PWM 的占空比盡可能保持在50% 以內,這是最壞的情況。
增加PWM 頻率。頻率越高,PWM 的周期越短;因此,電流上升的時間更短。建議無刷直流電機的PWM 頻率不低于50 kHz。80 kHz 或更高的PWM 頻率,更適合于電氣時間常數非常小的電機。
增加電感。無刷直流電機的電感值非常小。增加外部電感是一個好主意,因為它們可以減緩電流的上升和下降,從而減少電流紋波。此外,針對1 k H z 的PWM頻率給出了指定的電感值。由于電機電感隨PWM 頻率變化,在50 kH z 的典型PWM 頻率下,電感可能會降低至規定值的70%。
通常通過實驗確定電感的最佳值。需要增加額外的電感,如圖10 所示。雖然這種解決方案可以解決當前的紋波問題,但集成附加電感可能并不容易,尤其是在空間有限的情況下。因此,首先探索其它兩種方案通常是明智選擇。
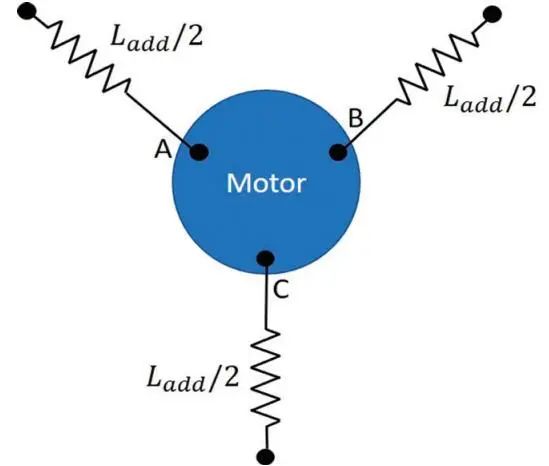
▎圖 10 :帶有額外線路電感的無刷電機。
PWM 具有許多優點,是無刷直流電機中應用最廣泛的解決方案。設置適當的PWM 電壓,使用較高的PWM 頻率,將有助于減少紋波,并可以避免使用額外的電感。得益于現在電子元件較低的成本,使得采用高PWM 頻率成為一種簡單的解決方案。
當涉及電子設備的尺寸和重量時(例如嵌入式電子設備的便攜式設備),或者當電池壽命是一個關鍵指標時(額外電感內阻的焦耳損耗所消耗的額外能量),電氣設計師在開發運動控制系統時應考慮這些參數。
關鍵概念:
■ 審查無刷直流電機的PWM調節。
■ 了解無刷直流電機PWM的限制。
思考一下:
您是否正在解決選擇或開發使用PWM驅動無刷直流電機的電子設備所面臨的挑戰?
審核編輯:劉清
-
微控制器
+關注
關注
48文章
7487瀏覽量
151042 -
PWM
+關注
關注
114文章
5141瀏覽量
213390 -
無刷直流電機
+關注
關注
60文章
686瀏覽量
46008
原文標題:細說 | 無刷直流電機如何控制?
文章出處:【微信號:控制工程中文版,微信公眾號:控制工程中文版】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
STM32 HAL驅動有刷直流電機和無刷直流電機






 工商網監
工商網監
評論