") 如何實(shí)現(xiàn)自動(dòng)導(dǎo)引小車準(zhǔn)確定位、自如穿行?
如何實(shí)現(xiàn)自動(dòng)導(dǎo)引小車準(zhǔn)確定位、自如穿行?
1.應(yīng)用挑戰(zhàn)
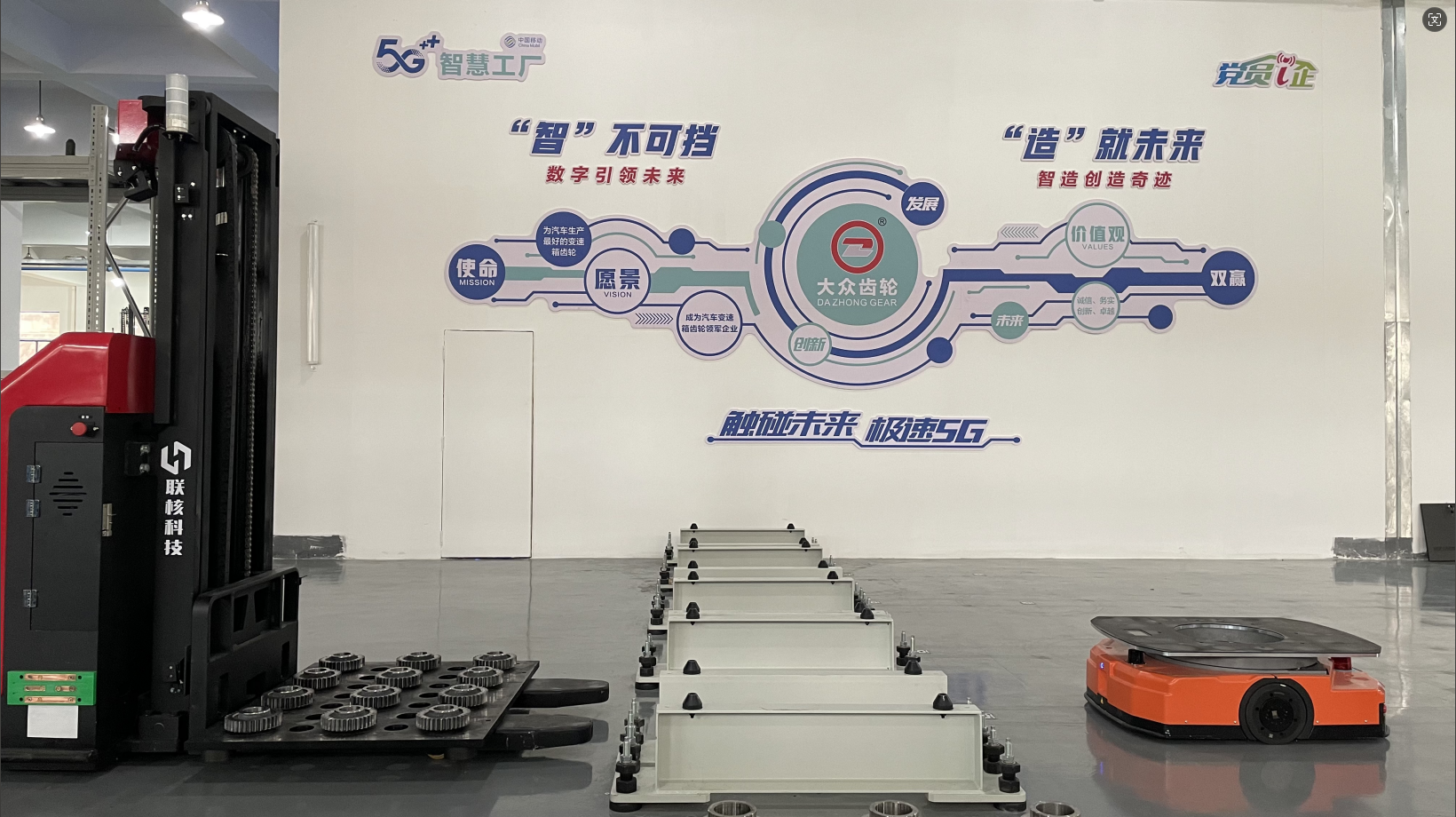
在現(xiàn)代倉(cāng)儲(chǔ)物流應(yīng)用中,自動(dòng)引導(dǎo)運(yùn)輸小車得到了日益廣泛的應(yīng)用,這些自動(dòng)化機(jī)器人結(jié)合了機(jī)架系統(tǒng)與車身本體實(shí)現(xiàn)貨物運(yùn)輸。為了使小車的運(yùn)輸過(guò)程順暢高效,小車需先行駛到貨物載體邊并對(duì)準(zhǔn)凹槽,再提升貨物,隨后駛往指定的目的地。想要實(shí)現(xiàn)自動(dòng)化流程,需確保機(jī)器人能可靠識(shí)別貨物載體,并定位方向準(zhǔn)確。只有扁平型的機(jī)器人小車,才能適用于在貨架間的自動(dòng)化引導(dǎo)運(yùn)輸,因此,導(dǎo)航系統(tǒng)也必須緊湊。
2.目標(biāo)
我們的目標(biāo)是盡可能確保貨物載體的可靠識(shí)別。當(dāng)自動(dòng)化小車在貨架下行駛時(shí),小車必須能準(zhǔn)確地定位在貨物載體下方,并予以準(zhǔn)確校準(zhǔn),以確保小車能正確地裝載貨物載體并安全運(yùn)輸,同時(shí)避免翻倒風(fēng)險(xiǎn)。提貨不均也可能導(dǎo)致交貨時(shí)出現(xiàn)問(wèn)題,例如,載體可能會(huì)產(chǎn)生碰撞或無(wú)法進(jìn)入預(yù)設(shè)位置。
3.解決方案
倍加福基于攝像技術(shù)的位置引導(dǎo) PGV 定位系統(tǒng),由 Data Matrix 標(biāo)簽進(jìn)行引導(dǎo),PGV定位系統(tǒng)以非接觸方式對(duì)其進(jìn)行檢測(cè),PGV讀頭由內(nèi)置照明單元和大讀取窗口的相機(jī)系統(tǒng)組成。貨物載體的底部貼有一個(gè) Data Matrix 多碼的標(biāo)簽。安裝在自動(dòng)小車頂部的讀頭,通過(guò)讀取這些標(biāo)簽來(lái)識(shí)別貨物載體。同時(shí),檢測(cè)讀頭相對(duì)于標(biāo)簽的方向,從而確定目標(biāo)對(duì)象的準(zhǔn)確位置。利用PGV的反饋數(shù)據(jù),控制系統(tǒng)可以在自動(dòng)小車與貨物載體接近時(shí)立即準(zhǔn)確校準(zhǔn)定位,以確保可靠提取相應(yīng)載體。
技術(shù)特性: ‘
循環(huán)時(shí)間:10 ms
高度:35mm
X軸和Y軸精度:0.2 mm
角度精度:1°
工作距離:100 mm
讀取范圍:120×80 mm
4.產(chǎn)品優(yōu)勢(shì)
PGV系統(tǒng)確保了貨物載體的可靠識(shí)別,以及高分辨率的位置檢測(cè)。集成有照明單元的補(bǔ)光燈系統(tǒng),即使在惡劣的照明條件下,讀頭也能可靠檢測(cè)標(biāo)簽。讀頭外形非常緊湊,可安裝在小型自動(dòng)引導(dǎo)小車上。因其機(jī)械結(jié)構(gòu)堅(jiān)固,非接觸式定位功能可實(shí)現(xiàn)無(wú)磨損應(yīng)用,因此其使用壽命較長(zhǎng)。開放式協(xié)議使其可靈活地集成到各種控制系統(tǒng)中,即插即用,便于調(diào)試。
5.特性一覽
亮點(diǎn)
大讀取窗口及內(nèi)置照明單元,用于可靠檢測(cè) Data Matrix 標(biāo)簽。
實(shí)時(shí)準(zhǔn)確的位置檢測(cè),可實(shí)現(xiàn)自動(dòng)引導(dǎo)運(yùn)輸系統(tǒng)在貨物載體下方的準(zhǔn)確位置校準(zhǔn)。
緊湊型外殼,適用于狹小空間。
采用即插即用的配置,實(shí)現(xiàn)輕松安裝和調(diào)試。
采用開放式協(xié)議,可以靈活集成到各種控制系統(tǒng)。
審核編輯:湯梓紅
-
機(jī)器人
+關(guān)注
關(guān)注
210文章
28231瀏覽量
206614 -
定位系統(tǒng)
+關(guān)注
關(guān)注
10文章
577瀏覽量
36453 -
倍加福
+關(guān)注
關(guān)注
0文章
120瀏覽量
6776
原文標(biāo)題:智能搬運(yùn) | 如何實(shí)現(xiàn)自動(dòng)導(dǎo)引小車準(zhǔn)確定位、自如穿行?
文章出處:【微信號(hào):gh_c9a84232a0b5,微信公眾號(hào):倍加福】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
如何選擇讓自己滿意(適合)的agv小車?純干貨分享
Agv小車能對(duì)接哪些自動(dòng)化設(shè)備?最后一個(gè)你絕對(duì)想不到
AGV讀卡器在AGV自動(dòng)搬運(yùn)小車上應(yīng)用方案

什么是AGV小車?有什么功能?適用于哪些場(chǎng)景?
AGV小車在智慧工廠中如何精準(zhǔn)定位

應(yīng)用于AGV小車的CAN模塊簡(jiǎn)述
RFID工業(yè)級(jí)讀寫器如何助力AGV小車智能定位的?
倍加福R2000系列傳感器助力自動(dòng)導(dǎo)航小車準(zhǔn)確導(dǎo)航
ISP數(shù)據(jù)在精確定位中的技術(shù)實(shí)現(xiàn)
服務(wù)提供商數(shù)據(jù)在精確定位中的應(yīng)用
隧道zigbee精確定位系統(tǒng)優(yōu)勢(shì)及功能
AGV小車使用避障雷達(dá)
隧道zigbee精確定位系統(tǒng)
自動(dòng)導(dǎo)引車(AGV)控制系統(tǒng)的實(shí)現(xiàn)過(guò)程
配網(wǎng)故障定位:如何準(zhǔn)確判斷并快速修復(fù)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論