 智能手機中的3D ToF深度傳感技術
智能手機中的3D ToF深度傳感技術
作為智能手機的三大創新之一,3D ToF深度傳感技術依靠體積小、誤差低、直接輸出深度數據與抗干擾性強等優勢,成為近年來智能手機上的關鍵創新亮點之一。
ToF技術解碼
ToF是Time of Flight的縮寫,又稱飛行時間法3D成像。這種成像技術通過向目標發射連續的特定波長的紅外光線脈沖,通過特定傳感器接收待測物體傳回的光信號,計算光線往返的飛行時間或相位差得到待測物體的3D深度信息,ToF相機的亮度圖像可以通過模型迅速連接起來。
相比3D深度視覺其它兩種方案(結構光與雙目立體成像技術)而言, ToF方案在實際應用中的優勢顯著。例如:在畫面拍攝后計算景深時不需要進行后處理,既可避免延遲又可節省采用強大后處理系統帶來的相關成本;ToF測距規模彈性大,大多數情況下只需改變光源強度、光學視野以及發射器脈沖頻率即可完成;由于具有不易受外界光干擾、體積小巧、響應速度快以及識別精度高等多重優勢,使得ToF無論是在移動端還是車載等應用領域日漸成為3D視覺的首選技術方案。目前,ToF技術應用領域廣泛,包括:
消費電子:虛擬現實、人臉識別、體感交互等新零售:手勢識別、客流統計、行為識別等智能安防:人臉識別、行為分析等工業級自動化:自動避障、測量測距、感知定位等醫療電子:增強現實、遠程交互等汽車電子:輔助駕駛、人臉識別、手勢識別等
TOF測量原理
TOF飛行時間,即傳感器發出經調制的近紅外光,遇物體后反射,傳感器通過計算光線發射和反射時間差或相位差,來換算被拍攝景物的距離,以產生深度信息,此外再結合傳統的相機拍攝,就能將物體的三維輪廓以不同顏色代表不同距離的地形圖方式呈現出來。
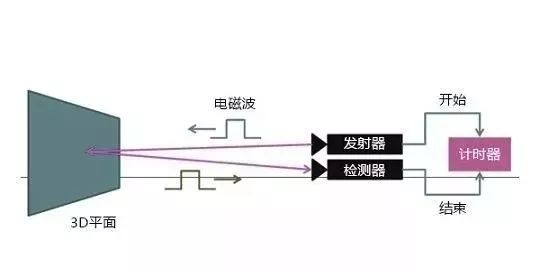
發射的紅外光線被被測物體反射后回到傳感器,內置的計時器記錄其來回時間,然后即可計算出其距離。聽起來好像和大家玩爛了的超聲波測距沒啥不同。但其實不然,超聲波測距對反射物體要求比較高,面積小的物體,如線、錐形物體就基本測不到,而TOF紅外測距完全可克服此問題,同時TOF測距精度高,測距遠,響應快。
這種技術跟3D激光傳感器原理基本類似,只不過3D激光傳感器是逐點掃描,而TOF相機則是同時得到整幅圖像的深度信息。
ToF的原理是通過光子的反射測距。傳統上是紅外測距,但紅外測距沒有計算時間差的能力,主要靠測光強,但打在黑色、白色等顏色物體上,由于材料本身的吸收度不同,也會影響測距效果,因此ST的FlightSense采用計算發射和返回的光子時間差,即計算飛行時間(ToF)方案。另外在集成度上,ST的方案是發射和接收都做在一起,而紅外測距往往是分立方案。
|
第一代 VL6180X |
第二代 VL53L0X |
第三代 VL53L1X |
|
| 測距 | 40cm | 2m | 4m |
| 激光器 | 850nm | 940nm | 940nm |
| 視場角 | 25° | 25° | 27° |
| 環境光感測 | 有 | 無 | 無 |
| 測距精度 | ±10mm | ±3% |
±1% |
市面上有多家公司采用ToF方法,但主要采用相位測距法,主要用于工業,原理是脈沖計算法,但在波谷的能量就不測量了,會造成能量損失。
為何ST方案的測距角度都是25°?因手機鏡頭弧度是25°左右,所以市面上的產品往往是25~30°視角。FlightSense二代之所以是2米測距,因手機拍攝的理想距離是1.2~1.5米。
市面上有多家公司采用ToF方法,但主要采用相位測距法,主要用于工業,原理是脈沖計算法,但在波谷的能量就不測量了,會造成能量損失。
飛行時間(ToF)傳感系統是最有盈利空間的創新成像技術之一。市場上的主要消費類產品制造商都希望在各種智能硬件中集成飛行時間(ToF)測距,以提供3D成像、接近感應、環境光感測、手勢識別等功能。
意法半導體在飛行時間(ToF)傳感方面潛心研究,而iPhone 7 Plus中的飛行時間(ToF)測距傳感器是意法半導體為蘋果公司定制的產品。
這款為蘋果定制的產品位于iPhone手機前面、主揚聲器上方,采用光學柵格陣列(LGA)封裝形式,尺寸為2.8mm x 2.40mm,小于意法半導體對外公開銷售的任一款ToF傳感器。
ToF究竟是未來趨勢還是廠商套路
既然 TOF 的歷史已經如此悠久,為啥近一年才成為消費電子的熱詞呢?
因為概念出現了混淆,如今熱議的 TOF 技術其實應該叫 TOF 3D 技術,屬于 3D 視覺技術的一種,目標是和 2D 相機配合建立物體和空間的立體模型,而之前的 TOF 只是點光源,只是用于測量前方物體距離有多遠而已,無論從實現目標還是復雜度來說都不能相提并論。
此外,有關 TOF 3D 的基本原理還是要再簡單講一下,首先通過紅外光源,打出超短的脈沖信號,形態是面光,要求覆蓋整個視場范圍,然后通過紅外相機接收反射信號,在成像的同時也獲得了空間內每個點收發信號的時間差,最后通過光速計算出距離,就能搞定視場內整個空間的 3D 輪廓。
當然,理論都是很美好的,否則沒人會愿意推進它們的實用化,尤其對大家伙們來說,如今的產品做到了什么程度才是關鍵。
好在這件事分析起來不難,因為目前主流市場上用 TOF 3D 的產品也就三款,一個“前置”是 vivo NEX雙屏版,兩個后置,OPPO R17 Pro 和華為榮耀 V20。接下來我們逐個分析。
vivo NEX 雙屏版官方說的很明確,TOF 就是拿來搞面部識別用的,和結構光一個玩法。模組上的合作伙伴是艾德諾半導體(ADI),型號是 ADDI9036,鏡頭光圈 f/1.3,再就沒有其他的公開資料。不過從 ADI 以往展出的產品來看,最近的是 ADDI9033,用于工業機械臂,sensor 分辨率是 VGA(640*480) 水準,這樣可以推知 9036 應該是 9033 的衍生版本。
其中值得一提的是,對于前置面部識別來說,行業內主流的選擇是結構光,原因各家有多次科普,這里就簡單提一下,即在正常使用距離(0.2-1.2m),結構光的深度精度明顯比 TOF 更有優勢,TOF 則需要更遠一些才能發揮。這很好理解,畢竟距離太近的話,精度需求也更細微,信號來回時間太短,甚至接近于信號本身的脈沖長度,算起來誤差就會很大,而距離變長的話,結構光實際有效的采集點會變少,單個斑點面積會變大,精度當然也會有明顯的損失。不過從實際產品來看,vivo NEX 至少接入了支付寶的面容支付,說明安全性上用起來并沒啥問題。

而在構造上,從實際產品來看,TOF 面部和結構光都是 3 個必需元器件,但不同在于,結構光需要點陣投影器和紅外相機拉開一定的距離,因此它們在所有產品上都是分居左右兩側的,而 TOF 沒這種需求,因而相對來說堆疊比較簡單。
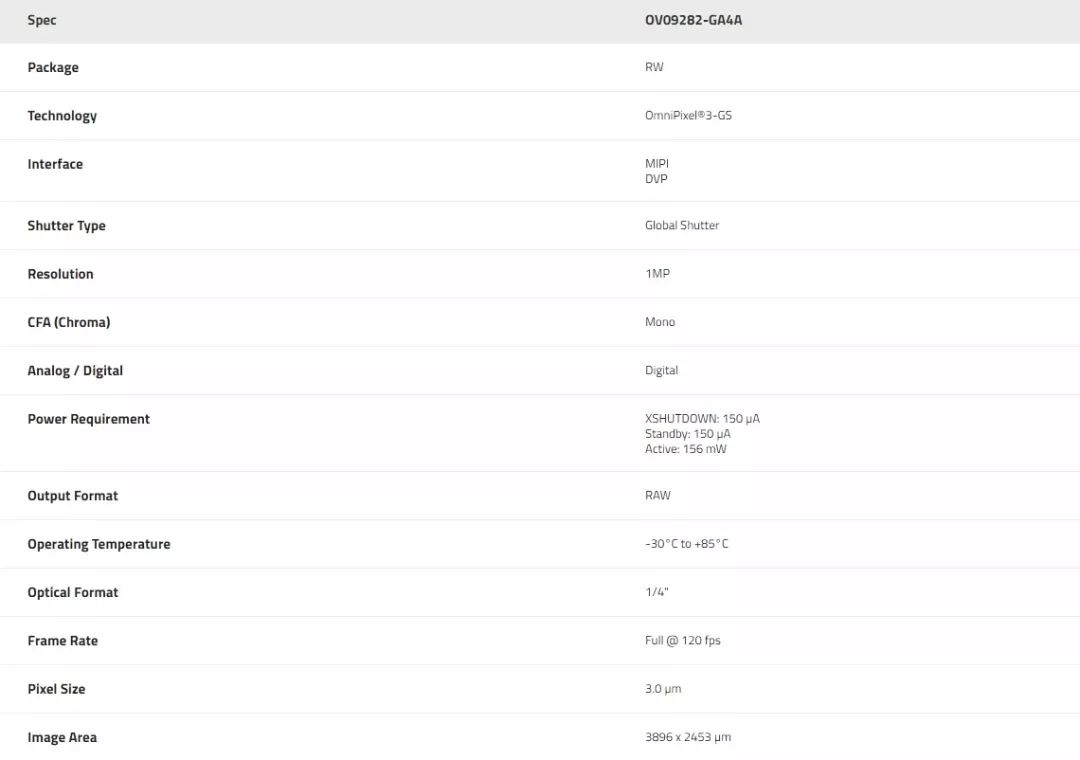
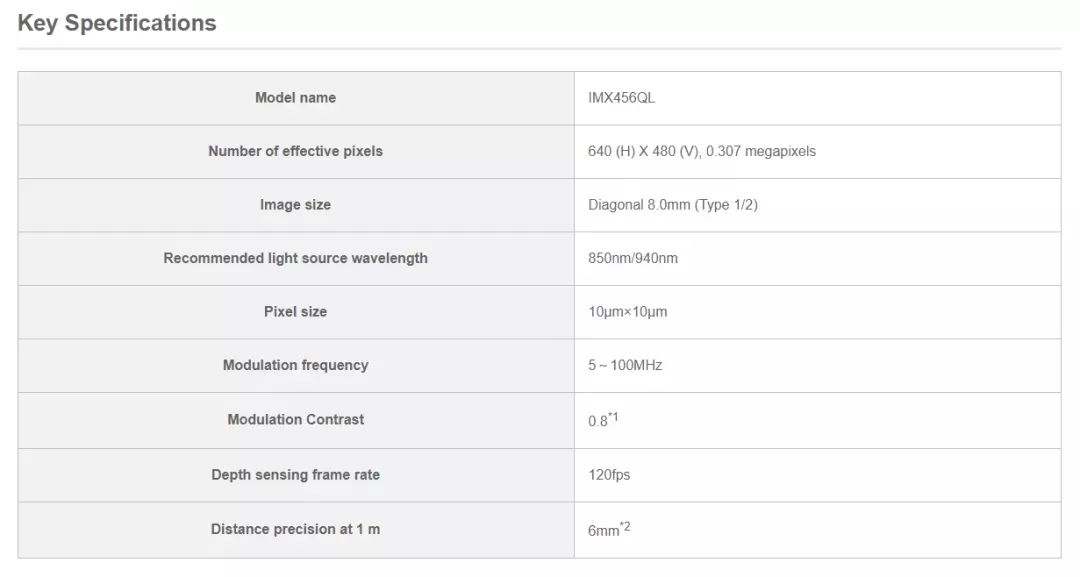
至于 vivo 官方所宣稱的“TOF 精度是結構光的 10 倍”,則應該是指其 sensor 的 VGA 分辨率,640*480=307200 正好 30 萬像素,是結構光 3 萬個點陣的“10 倍”。不過這很顯然是偷換概念,畢竟結構光的點陣和 sensor 的分辨率并不能混為一談,真要論起來,結構光陣營最低端的 OV9282 都有 100 萬像素,數量碾壓 TOF,而高端 TOF sensor 用的 IMX456QL,單像素尺寸 10μm,反過來又碾壓了結構光普遍的 3μm,你說這事該咋整? 況且,作為 3D 視覺技術,更重要的還是在于深度的精度,無論 TOF 的分辨率還是結構光的點陣數量,都屬于 2D 平面的概念,比來比去也沒啥意思。
綜上,“前置”用于面部識別的 TOF,實際用起來不會好于結構光。
該輪到后置這兩位,R17 Pro 和 V20 其實沒有本質區別,sensor 都是同款,索尼 IMX316,公開資料也很少,索尼對此一言不發。
找遍全網,只有一個國外設備商有所提及 http://www.dynaoptics.com/time-of-flight.html ,具體見下,IMX316 被稱為“輕 TOF”,也就是入(最)門(低)級(端)。
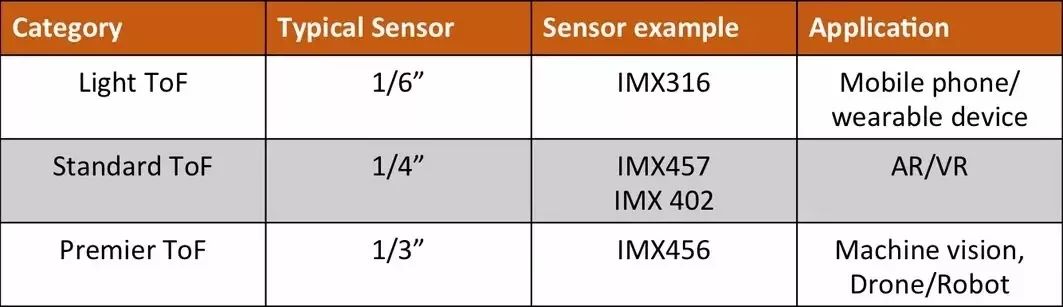
需要補充的是,上面的表格數據有些偏差,比如索尼已經公布的 IMX456QL,是 1/2 英寸 10μm,30 萬像素,和表格上 1/3 英寸不同。不過 IMX316 的參數還是和網絡上流傳的吻合,1/6 英寸,像素只有一種傳說是 4.32 萬,好吧,是挺慘的。
那么這玩意到底有啥用呢?一是拿來當景深攝像頭用,榮耀 V20 就是這么干的,眾所周知這活是個攝像頭就能干,所以意義不大;R17 Pro 早期有個 TOF 3D 建模功能,圍物體轉一圈就能建立一個 3D 模型,和華為的小物建模用途差不多,但可能是因為效果過于感人,當初到手試了一下從來沒建出過像樣的東西,在某次更新之后,OPPO 取消了這個功能,目前只有內置的 AR 測量功能依賴了 TOF 模組,其實現效果和 iPhone 的測距儀大同小異,功能上全面一點點。
因此簡單說,就是目前的 IMX316 其實沒什么用,或者說很容易替代,沒啥存在的必要。考慮到 sensor 的規格,以及這些產品的上市時間,它們的應該也沒什么使用潛力,故而可以說后置的 TOF 目前來看沒啥存在的必要。
總結一下,目前的 TOF 3D 技術,“前置”體驗不超過結構光,后置的存在意義暫時為 0,或許過個半年一年,后置 TOF 會找到用武之地,但也很可能輪不到目前已經上市的 IMX316 們,畢竟規格偏弱。
審核編輯:郭婷
-
智能手機
+關注
關注
66文章
18433瀏覽量
179863 -
虛擬現實
+關注
關注
15文章
2285瀏覽量
94829
原文標題:智能手機中的3D ToF技術
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
MEMS傳感器應用領域 MEMS技術在智能手機中的應用
SOC芯片在智能手機中的應用

星宸科技擬融合ToF和ISP/SoC技術,推出3D感知智能化系統解決方案
CYC8PROTO-063-BLE是否可以通過智能手機上的標準設置應用程序建立連接?
OLED技術在智能手機領域持續高漲
紫光展銳助力全球首款AI裸眼3D手機發布
三星發布三款新型移動圖像傳感器,重塑智能手機攝影體驗
奧比中光攜多款3D相機深度參與國內3D視覺最高規格會議

銳思智芯與OPPO、高通共同推動創視覺傳感技術在智能手機領域應用

兩種應用于3D對象檢測的點云深度學習方法

對手機和電腦的配置沒有去深入的了解。。。 先說智能手機吧
倍加福全新3D視覺傳感器的工作原理和典型應用

深度解析3D視覺成像幾種典型方案






 工商網監
工商網監
評論