 ARINC 818解決棘手的傳感器融合問題
ARINC 818解決棘手的傳感器融合問題
傳感器融合系統在監視、目標跟蹤和導彈防御等軍事應用中繼續激增,但它們也帶來了傳感器同步、布線重量、距離限制和 EMI 等系統級挑戰。作者討論了如何將ARINC 818(航空電子數字視頻總線)用作靈活的傳感器接口來解決這些系統級問題。此外,還描述了一種雙向ARINC 818系統架構方案,用于將多個傳感器時間復用到單根光纖上,并實現傳感器命令和控制的返回路徑。
隨著傳感器融合系統在增強視覺、監視、目標跟蹤和導彈防御等應用中的激增,從傳感器吊艙遠程執行處理時存在許多系統級挑戰,包括:傳感器同步、布線重量、距離限制和 EMI。ARINC 818協議已廣泛用于駕駛艙顯示器等航空航天視頻系統,可用作靈活的傳感器接口來解決這些系統級問題。介紹了一種雙向ARINC 818系統架構,包括將多個傳感器時間復用到單根光纖上并實現傳感器命令和控制的返回路徑的方案。
ARINC 818協議概述
ARINC 818相對較新,許多工程師還不熟悉該協議。在描述如何在傳感器融合系統中使用 ARINC 818 之前,對該協議的概述將有助于討論。
該標準名為航空電子數字視頻總線(ADVB),基于光纖通道音頻視頻(FC-AV)標準,是對光纖通道的改編,增加了視頻傳輸功能。但是,FC-AV標準旨在支持非常廣泛的行業和應用,而ADVB則專注于航空電子視頻的關鍵需求。ADVB 從 FC-AV 簡化而來,無需鏈路初始化、流量控制或其他光纖通道交換(如端口登錄)。ADVB 被定義為單向鏈路,雖然經過簡化,但 ADVB 保留了光纖通道的屬性,這些屬性有利于任務關鍵型視頻應用,例如高速、高可靠性、低延遲和靈活性。
此外,ARINC 818 是一種點對點 8B/10B 編碼協議,用于視頻和數據的串行傳輸。該協議是分組的,以視頻為中心,并且非常靈活,支持一系列復雜的視頻實現,包括將多個視頻流多路復用到單個鏈路上。ARINC 818 和 FC-AV 定義了從 1 Gbps 到 8 Gbps 的鏈路速度,帶寬高達 800 MBps,可滿足最苛刻的傳感器融合應用。
ADVB 數據包結構
圖 1 所示的 ADVB 框架是 ARINC 818 的基本傳輸機制。將這些數據包稱為“ADVB 幀”而不是簡單地稱為“幀”非常重要,以消除與視頻幀的潛在混淆。
圖1:ADVB 幀是 ARINC 818 的基本傳輸機制。

ADVB 幀的開始由幀開始 (SOF) 4 字節有序集發出信號,并以幀結束 (EOF) 有序集終止。每個 ADVB 幀都有一個由六個 32 位字組成的標準光纖通道標頭。這些標頭字與 ADVB 幀原點和預期目標以及序列中的 ADVB 幀位置等內容有關。ADVB 幀標頭中的源 ID (SID) 字段允許將來自每個傳感器的視頻與其他傳感器區分開來。
“有效負載”包含視頻、視頻參數或輔助數據。有效負載的大小可以有所不同,但限制為每個 ADVB 幀 2,112 字節。為了確保數據完整性,所有ADVB幀都具有針對SOF和CRC字之間的數據計算的32位循環冗余校驗(CRC)。CRC 與為光纖通道定義的 32 位多項式計算相同。
ADVB容器結構
ARINC 818規范將“容器”定義為一組用于傳輸視頻的ADVB幀。換句話說,視頻圖像和數據被封裝到跨越許多ADVB幀的“容器”中。每個ADVB幀的“有效載荷”包含數據或視頻。在容器中,ARINC 818 定義了包含某些類型數據的“對象”。也就是說,容器中的某些 ADVB 幀是對象的一部分。在容器中找到的四種類型的對象如表 1 所示。
表 1:容器中的 ADVB 幀是對象的一部分,容器內有四種類型的對象。
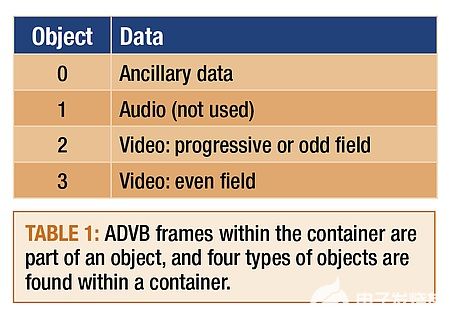
在大多數情況下,單個容器精確映射到單個視頻幀。一個示例將闡明如何傳輸視頻:要傳輸 XGA 視頻幀(1,024 x 768,24 位顏色),ARINC 818 將總共使用 1,537 個 ADVB 幀。第一個 ADVB 幀的有效負載保存容器標頭信息和輔助數據;接下來是 1,536 個 ADVB 幀,其中每個 ADVB 幀的有效負載包含半行視頻。
ARINC 818 傳感器融合接口架構
圖2顯示了與三個傳感器接口的架構。傳感器接口模塊與傳感器位于同一位置,用于將來自三個傳感器的視頻多路復用到單個ADVB鏈路上。在此示例中,有兩個紅外傳感器,每個傳感器每像素 14 位,分辨率為 640 x 512,頻率為 60 Hz,還有一個 1,024 x 768 的 24 位彩色光學傳感器。這些傳感器總共需要 220 MBps 的吞吐量,并且可以多路復用到單個 3.1875 Gbps ARINC 818 鏈路上。
圖2:傳感器接口模塊與傳感器位于同一位置,用于將來自三個傳感器的視頻多路復用到單個ADVB鏈路上。
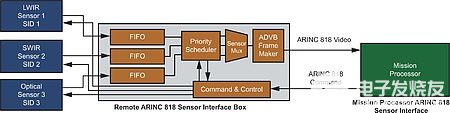
該架構包括來自接收器的 ARINC 818 命令和控制路徑。在示例中,命令和控制路徑顯示為ARINC 818,但如果不需要像ARINC 818這樣的高速總線,則可以使用RS-422或類似的數據總線來實現。在此示例中,ARINC 818 (3.187 Gbps) 比 RS-422 (10 Mbps) 快 300 倍以上。
傳感器還可以具有 ARINC 818 接口。可以使用 COTS 轉換器板(例如,RS-170 至 ARINC 818)或在 FPGA 中實現的 ARINC 818 IP 核將 ARINC 818 接口設計到傳感器中。
將視頻定時多路復用到單個鏈路上
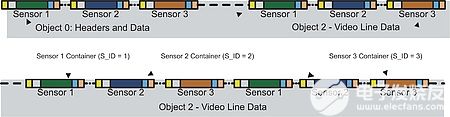
ARINC 818 基于網絡協議構建,其中數據包標頭 ID 允許將多個傳感器多路復用到單個光纖上。在單根光纖上多路復用可減少電纜和連接器的數量,從而減輕重量。ADVB 標頭中的源 ID 字段用于區分來自不同傳感器的視頻或數據。在我們的示例中,SID=1 是 LW 紅外傳感器,SID=2 是 SW IR 傳感器,SID=3 是光學傳感器。圖3顯示了ADVB幀中的分組視頻線如何在鏈路上交錯。
圖3:ADVB 幀中的分組視頻線在鏈路上交錯。
命令和控制界面
ARINC 818的主要重點是駕駛艙視頻連接,該標準僅定義了單向鏈路。但是,可以在相反的方向上添加第二個鏈接以進行命令和控制。作為命令和控制鏈路,對象 0 中的輔助數據字段用于小數據包(如同步脈沖),而對象 2 或 3 用于發送“圖像大小”數據,例如壞像素替換圖或非均勻性校正 (NUC) 增益和偏移值。命令和控制鏈路的更新速率可能比視頻鏈路快或慢。
通過命令和控制鏈路發送的典型參數可能包括:積分時間、同步信號、NUC、傳感器模式(待機、BIT或正常)、測試碼型、壞像素替換、讀取溫度、像素增益/偏移數據以及校準和測試碼型數據。這些參數是 ADVB 幀的有效負載,根據數據類型插入到命令和控制鏈路上的對象 0、2 或 3 中。
ARINC 818:解決系統級問題
現在,我們將研究ARINC 818緩解的四個系統級挑戰:視頻同步以及重量、距離和EMI。
視頻同步
由于傳感器吊艙遠離融合引擎,復雜圖像融合處理的第一步需要圖像的時間同步。目前的方法涉及緩沖來自每個傳感器的多個圖像幀,以便圖像處理算法可以將正確的時間偏移應用于存儲的數據。但是,緩沖多個視頻幀會產生大約 16 毫秒到 48 毫秒的延遲,這對于平視顯示器 (HUD) 起飛和著陸輔助等時間關鍵型應用的嚴格延遲預算來說可能太多了。
相比之下,ARINC 818返回鏈路提供了一種同步鎖相傳感器的方法,因此接收的圖像數據在時間上將非常緊密地相關。例如,傳感器接口塊可以使用 OBJ 0 幀的到達作為傳感器的同步鎖相觸發器。這可以像在檢測到每個 SOFi 時發送同步鎖相同步脈沖一樣簡單。(SOFi 是序列中的第一個 SOF。但更有可能的是,對于使用具有不同內部延遲(微秒到毫秒)的異構傳感器的增強視覺應用,傳感器接口盒命令和控制將需要對傳感器觸發器應用獨立的延遲。觸發延遲值可以包含在ARINC 818返回鏈路數據中,從而允許接收器直接控制輸入傳感器圖像之間的偏斜。觸發延遲可以在啟動校準期間設置,如果需要,可以實時更改。這種系統級方法可以使傳感器圖像在時間上非常緊密地相關,從而消除了接收器緩沖多個完整圖像的負擔。更重要的是,這種方法將延遲貢獻從全幀時間(10 毫秒)減少到行時間(100 微秒)。
重量、距離和電磁干擾
除了視頻同步,ARINC 818在重量、距離和EMI方面也有很多優勢。首先,ARINC 818光纖實施顯著減輕了系統的重量。例如,如果傳感器吊艙距離圖像處理15米,并且使用典型的銅接口,則將有三組同軸電纜傳輸視頻信號,三組雙絞屏蔽電纜來傳輸RS-422等命令和控制信號。航空航天級同軸電纜的電纜重量為15 g/m,扭曲屏蔽為20 g/m。電纜總重量為 1,575 克。ARINC 818系統將包括一個重達380克的傳感器接口盒和一個重15克/米的雙光纖電纜,總重量為605克,重量減輕62%。(連接器不包括在計算中,因為可以使用各種各樣的連接器。
由于ARINC 818使用單模(最遠10公里)或多模(500米)光纖,因此距離通常不是問題。與CameraLink上的10 M限制或IEEE 1394(Firewire)或DVI上的5 M限制相比,即使是銅纜上的ARINC 818也更勝一籌,在1 Gbps時的距離為25 M,在2 Gbps時的距離為15 M。大多數商業和軍事航空航天應用在多模光纖上使用ARINC 818。光纖布線的另一個優點是抗EMI,它消除了所有銅纜固有的屏蔽需求 使用光纖進行ARINC 818等高頻傳輸消除了干擾其他電子設備的輻射發射和降低數據完整性的EMI敏感性問題。
ARINC 818 有利于現代傳感器融合系統
在傳感器遠離傳感器融合引擎的傳感器融合系統中,ARINC 818 在同步、帶寬、重量、距離和 EMI 抗擾度方面具有優勢。接口轉換器和ARINC 818 IP 核等 COTS 組件有助于在要求苛刻的傳感器融合應用中實施 ARINC 818。
審核編輯:郭婷
-
傳感器
+關注
關注
2548文章
50692瀏覽量
752034 -
接口
+關注
關注
33文章
8501瀏覽量
150839 -
光纖
+關注
關注
19文章
3871瀏覽量
72966
發布評論請先 登錄
相關推薦
MSP430F5xx系列上使用方向余弦矩陣算法的九軸傳感器融合

精密制造的革新:光譜共焦傳感器與工業視覺相機的融合

傳感器融合如何使 AMR 在工廠車間內高效移動
未來已來,多傳感器融合感知是自動駕駛破局的關鍵
傳感器融合的工作原理
深度解析:多傳感器融合SLAM技術全景剖析

Spring Boot和飛騰派融合構建的農業物聯網系統-改進自適應加權融合算法
【飛騰派4G版免費試用】Spring Boot和飛騰派融合構建的農業物聯網系統-數據融合算法篇
傳感器數據融合算法python代碼
多傳感器數據融合算法最關鍵的是
上海微系統所在無人系統的多傳感融合技術方面取得進展

基于隨機有限集的多傳感器多目標跟蹤技術






 工商網監
工商網監
評論