 如何防止光學像差/減少光學像差的負面影響
如何防止光學像差/減少光學像差的負面影響
什么是光學像差?
為了獲得最佳圖像質量,必須校正鏡頭光學像差。如果沒有適當校正,圖像最終會變模糊并丟失重要的圖像數據。本文重點介紹了六種光學像差,這些光學像差產生的原因,以及如何防止光學像差/減少光學像差的負面影響。
光學像差是指鏡頭設計上的缺陷,這種缺陷導致光線擴散,而不是聚焦形成清晰的圖像,它包括圖像中的所有光線、僅某些點或邊緣失焦。成像時會出現多種類型的光學像差。制造一個可以校正所有潛在像差的理想視覺系統將會大幅增加鏡頭的成本。在實踐中,鏡頭總會存在某種形式的像差,但重要的是盡量減少像差的影響。因此,鏡頭設計制造通常都會做出一些妥協。
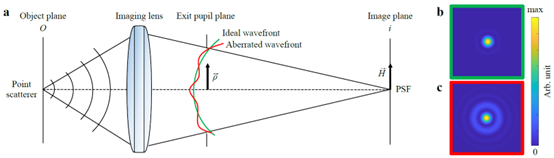
為了解釋像差如何使圖像模糊,首先需要解釋一下:什么是彌散圓?來自目標的光點到達鏡頭然后會聚在傳感器上時,圖像會很清晰。但是如果光點會聚于傳感器前后,則傳感器上的光線會廣泛分布、擴散。圖1中可以看到這種情況,其中可以看到點光源會聚在傳感器上,但隨著傳感器位置的變化,沿傳感器散布的光量也會發生變化。
光線越分散,圖像就越無法聚焦。除非光圈很小,否則圖像中距離較遠的目標通常會使背景或前景失焦。這是因為在前景中會聚的光會與來自背景中較遠目標的光在不同的點上聚焦。
如需了解更多在視覺系統中利用光圈優勢的信息,請閱讀Teledyne Lumenera的博文《通過鏡頭光圈優化提高成像系統性能》(文章鏈接:https://www.lumenera.com/blog/improving-imaging-system-performance-with-lens-aperture-optimization)。
彗 差 彗差會導致應聚焦為圖像中一個點的光變成光錐。由于出現了彗差,從鏡頭不同部位進入的光線在沿傳感器所在圖像平面聚焦的位置會越來越遠。 以一定角度進入鏡頭的光線會導致光線在圖像平面上形成不斷擴大的彌散圓軌跡。如圖2所示,這可能會導致擴大的光線軌跡影響任何試圖成像的點光源。在圖2頂部,彗差圖像可以看作是向下擴大的彌散圓的點光源,形成一個錐形圖像。這通常是光學元件未對準的結果。
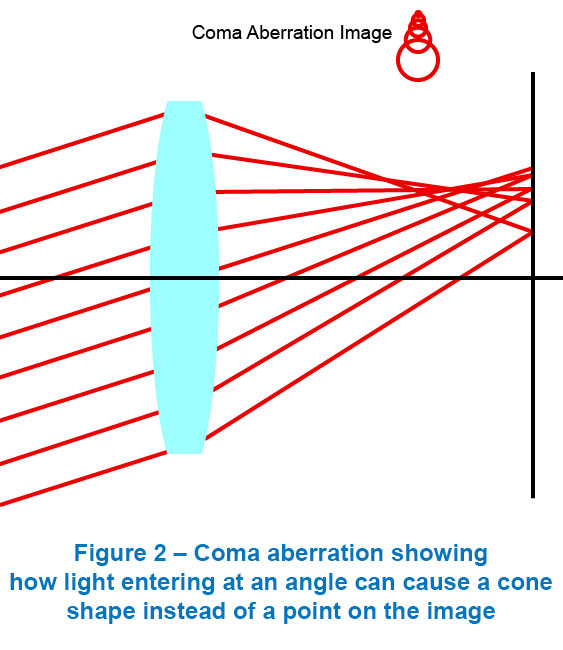
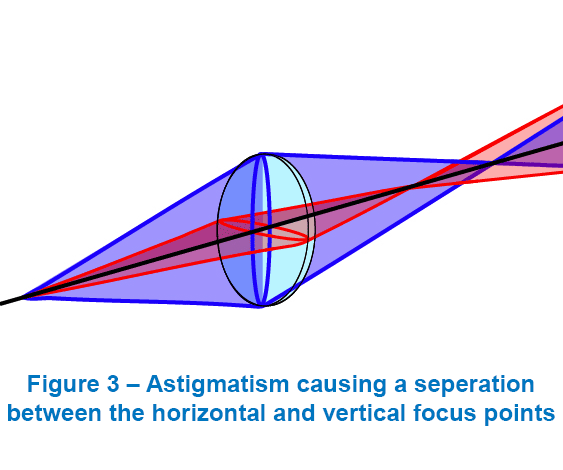
彗差發生在點光源中,例如恒星,因此彗差是天文攝影中特別重要的像差。減小光圈可以消除一些會引起這種效果的光線,但是對于天文攝影來說,減小光圈會消除很多成像必需的主題元素。在這種情況下,需要有專門的彗差校正設計鏡頭。散 光 在兩個垂直平面上傳播的光線聚焦于不同點時會產生散光。從圖3中可以看到,其中兩個焦點分別用紅色水平面和藍色垂直面表示。圖像中的最佳清晰度點將位于這兩個點之間,其中一個平面的彌散圓寬度并不大。當光學元件未對準時,散光會導致圖像的側面和邊緣出現失真。散光通常被描述為查看圖像中的線條時缺乏清晰度。彗差和散光通常是鏡頭系統內部光學元件發生類似未對準的結果。散光加劇時,肯定也會發生彗差。
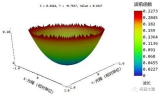
這種形式的像差可以使用大多數優質光學元件中的適當鏡頭設計來進行校正。用于固定散光的光學元件最初由卡爾蔡司操刀設計,并且已經有了一百多年的發展歷史。如今通常只有劣質鏡頭才會出現這種情況,或者在鏡頭掉落導致內部光學元件發生損壞或位移的情況下才會發生。(珀茲伐)場曲 許多鏡頭都有圓形焦點場。這可能會導致圖像出現軟角,并主要使圖像中心處于聚焦位置。然而,大多數鏡頭都有些圓形的焦點,如果不進行裁剪,就無法聚焦整個圖像。因為大多數鏡頭光學元件都有曲面。場曲是多個焦點導致圖像平面不平產生的結果。圖4顯示圖像平面為曲面,因為每個焦點都位于垂直于光軸的不同平面上。用一條線連接這些點時,會顯示出一個曲面。光線離開光軸進入鏡頭后,焦點并沒有聚焦在傳感器上。
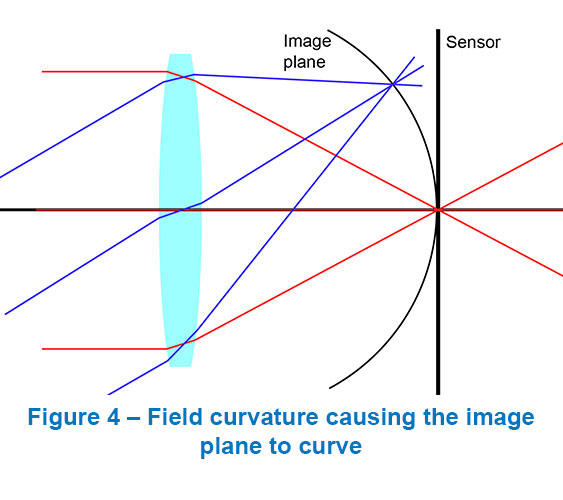
相機鏡頭已在很大程度上對此進行了校正,但許多鏡頭可能會存在一些場曲。有些傳感器制造商實際上正在開發可校正彎曲焦點的彎曲傳感器。這種設計將允許傳感器校正像差,無需采用具備高精度的、費用高昂的鏡頭設計。采用這種類型的傳感器,可以使用價格更實惠的鏡頭來產生高質量的結果。開普勒空間天文臺實際就采用了這種傳感器,其中彎曲傳感器陣列用于校正望遠鏡的大型球面光學元件。 如需了解開普勒望遠鏡的更多信息,請訪問https://www.nasa.gov/mission_pages/kepler/main/index.html。失 真 失真是指圖像向圖像幀的邊緣和側面扭曲。焦距極長或極短的鏡頭的失真效果可能最為突出。兩種最常見的失真形式是桶形失真和枕形失真。
桶形失真
桶形失真(又稱桶形畸變)的圖像邊緣和側面遠離中心彎曲。這在視覺上看起來像是圖像中心外凸,因為它捕獲到了彎曲視野(FoV)的外觀。例如,當在高層建筑的高處使用較短焦距的鏡頭(又稱“廣角鏡頭”)時,可以捕獲更寬的FoV。當使用產生極度扭曲和寬FoV的魚眼鏡頭時,FoV會實現最夸張的效果,如圖5所示。在這張圖像中,網格線用于幫助說明失真效果如何使圖像向靠近側面和邊緣的地方拉伸。
進入鏡頭的光線偏離光軸并導致桶形失真。使用廣角鏡頭可形成更大的成像區域,FoV會更寬,這種情況所帶來的優點可能比圖像各端出現的像差更重要。應該注意的是,有直線鏡頭可以補償桶形失真并拉直FoV。這對于使用短焦距進行圖像分析很重要。 對于需要寬FoV以更好捕獲景觀的航空成像,使用極短焦距的替代方法是使用多臺并排相機。由于大范圍成像最重要的因素是傳感器的像素寬度,而非相機的全分辨率,同時使用多臺相機捕獲圖像可能會實現很好的效果。Teledyne Lumenera白皮書《在航空成像中使用單臺相機還是多臺相機》(下載鏈接:https://www.lumenera.com/media/wysiwyg/documents/casestudies/Using_Single_vs_Multi_Cameras_in_Aerial_Imaging-White_Paper.pdf)中對此進行了進一步探索。 然而,在某些高度可以采用多臺相機并排方式,但在大多數情況下,在某個高度,相機將需要更長的焦距才能實現對更遠目標的清晰成像。因此,廣角鏡頭可以為航空成像或精準農業等其他應用拍攝更多細節,但需要考慮高度要求。關鍵因素是視覺系統所需的地面采樣距離(GSD)。在相機固定且相機高度保持不變的環境中(例如溫室),使用廣角鏡頭有助于對大部分目標環境進行成像。如需了解更多關于GSD以及如何建立航空成像系統的信息,請閱讀Teledyne Lumenera的博文《航空成像的挑戰:實現清晰、銳利的成像》(文章鏈接:https://www.lumenera.com/blog/the-challenge-of-aerial-imaging-achieving-a-clear-and-sharp-image)。
枕形失真
當光線通過枕形失真(又稱枕形畸變)向光軸彎曲時,圖像似乎向中間“收縮”。因此,圖像的邊緣和側面看起來會向圖像中心彎曲,如圖6所示,其中網格線越往中心彎曲,延伸越遠。 這種形式的像差最常見于焦距較長的遠攝鏡頭。遠攝鏡頭將放大圖像中的目標,焦距越長,最終圖像裁剪和縮放程度就越高。與其他像差一樣,該因素主要影響圖像的邊緣和側面。因此,保持圖像清晰的最簡單方法是采用較小的鏡頭光圈。在圖6中,圖像的中心保持原樣,未發生失真,因此使用較小的光圈,最終可以阻擋從邊緣處進入的失真光線。
復雜失真
復雜失真(又稱胡子畸變)是融合上述桶形失真和枕形失真而成的復雜畸變。胡子畸變會導致圖像內部向外彎曲,圖像外部向內彎曲。這是一種很罕見的畸變,其中影響圖像成像質量的畸變不止一種。胡子畸變通常表明鏡頭設計非常差,因為這種畸變產生的原因在于光學錯誤導致像差融合。散 焦 幾乎所有用過相機的人都熟悉散焦像差。當圖像只發生失焦時,就會出現散焦像差。圖像清晰度和對比度降低會導致細節隨著鏡頭逐步換景而變得更加模糊。 通常原因在于圖像中沒有目標位于目標發射或反射的光聚到傳感器的位置。這意味著光線將在距離傳感器很遠不同圖像平面上聚焦,從而導致圖像完全模糊。如圖7所示,所有光線都將形成很大的彌散圓,導致圖像完全失焦。
如需解決散焦問題,只需調整鏡頭的焦距或相機的位置,直到目標清晰聚焦。但是,在某些條件下,相機無法聚焦于特定目標。通常原因在于距離,主體離鏡頭太近或太遠。在無法聚焦的情況下,可能需要使用不同的相機鏡頭來改變焦距和最小焦距。或者縮小光圈也可以讓鏡頭聚焦在更遠的其他目標上,有效增加景深,即保持對焦的最近和最遠目標之間的距離。 如需了解視覺系統所需焦距類型,請閱讀Teledyne Lumenera的白皮書《正確使用鏡頭:選擇視覺系統鏡頭》(下載鏈接:https://www.lumenera.com/media/wysiwyg/documents/casestudies/Selecting_a_Lens_for_a_Vision_System-White_Paper.pdf)。色 差
縱向/軸向像差(也稱縱向/軸向色差)
光的顏色代表一種特定波長的光。彩色圖像將有多個波長進入鏡頭并由于折射而聚焦在不同的點。縱向或軸向色差產生的原因是不同波長光線沿光軸在不同點聚焦。波長越短,其焦點就越靠近鏡頭,而波長越長,則會發生相反情況,即焦點離鏡頭越遠,如圖8所示。采用更小的光圈,進入鏡頭的光線可能仍會聚焦在不同的點,但“彌散圓”的寬度(直徑)會大幅減小,避免圖像模糊嚴重。
橫向/側向像差(又稱橫向/側向色差)
導致不同波長沿圖像平面分布的離軸光為橫向或側向色差。這種像差會導致圖像主體邊緣形成彩色邊紋。校正難度比縱向色差更高。
可以使用產生不同折射率的消色差雙合透鏡來解決這個問題。將可見光譜的兩端聚焦在同一個焦點上,可以去除彩色邊紋。對于橫向和縱向色差,減小光圈大小也有助于解決這一問題。此外,建議最好不要在高對比度環境(即背景非常亮的圖像)中對目標進行成像。顯微鏡中可以使用復消色差(APO)的鏡頭來代替消色差鏡頭,消色差鏡頭利用三個透鏡元件來校正入射光的所有波長。當顏色成為關鍵要素時,確保減少色差將會產生最佳效果。
底 線
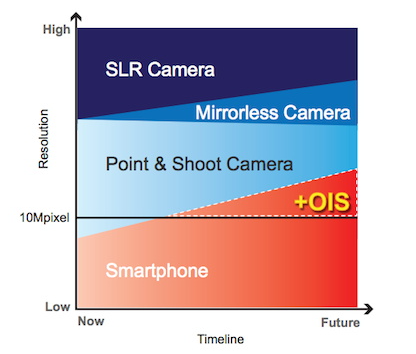
隨著傳感器像素越來越高,鏡頭設計中的缺陷會隨著更嚴重的像差變得更加明顯。有幾種類型的像差,這些像差的共同點是會模糊邊緣附近的圖像。 改善圖像聚焦以使更多FoV處于聚焦點的最簡單方法是采用較小的鏡頭光圈。在發生輕微像差的情況下,這一方案一般為首選解決方案。該方案將提供更長的景深,但同時也會降低圖像的亮度。因此,只有在照明充足時,該解決方案才可行。 但鏡頭系統內的光學元件可能會出現偏差。在像差非常強的情況下,仔細查看相機鏡頭的內部光學元件可能是唯一的解決方案。為避免出現這種情況,鏡頭應始終輕拿輕放,并進行固定,以避免遭受過度沖擊或振動。有些像差問題可以通過調整鏡頭的內部光學元件來修復,但需要大量的精密工作,并且只建議由訓練有素的專業人員進行精密修復。 需要注意的是,另一種常見的像差是球面像差(球差)。由于球面透鏡元件的形狀為曲面,光線越靠近曲面邊緣,就會以更陡峭的角度彎曲,導致光線沿著光軸聚焦在不同的點上。
審核編輯 :李倩
-
圖像
+關注
關注
2文章
1083瀏覽量
40418 -
光圈
+關注
關注
1文章
44瀏覽量
12267 -
光學
+關注
關注
3文章
747瀏覽量
36180
原文標題:如何獲取更出色的視覺成像?詳解六種光學像差影響因素
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
使用施密特-車爾尼-特納光譜儀改進光譜
光學透過率測量儀的技術原理和應用場景
TL064使用低壓單電源供電,還會有其他的負面影響嗎?
高質量激光光束光學系統中的空間濾波
遠心鏡頭的幾個參數解析

如何減少光學器件的數據延遲?

工業鏡頭光學系統的成像質量客觀評價
光學系統大口徑攝影鏡頭設計原理
什么是自適應光學?自適應光學原理與方法的發展
知語云智能科技揭秘:光學干擾技術全景解讀
光學圖像穩定原則
如何提高半導體測量的精度和效率
光束取樣光柵結構設計原理與步驟
矢量自適應光學技術解析





 工商網監
工商網監
評論