 機器視覺元件定位的重要性及應用案例
機器視覺元件定位的重要性及應用案例
工業機器人的定位、抓取任務是工業生產線上一項重要的應用,一般通過預先示教的方式讓機器人執行預定的指令動作。但是,一旦工件的狀態發生改變時,機器人便無法完成工作任務。
因此,這種方式在工業機器人的應用中存在很大弊端。在市場需求的牽引下,為機器人添加視覺引導也成為機器人領域的熱點之一,它通過模擬人類的眼睛幫助工業機器人檢測工件的位置狀態,再利用視覺信息引導機器人完成定位、抓取任務。很大程度上克服了傳統工業機器人的弊端,提高了工業機器人應用的靈活性和實時性。
從本質上講,機器視覺系統就是在工業環境中引導機器人、測量物品、統計物品、讀取條碼、字母和數字,以及檢測缺陷。在任何機器視覺應用中,無論是最簡單的裝配檢驗,還是復雜的3D機器人箱子拾取應用,通常第一步都是采用圖案匹配技術定位相機視場內的興趣物品或特征,興趣物品的定位往往決定機器視覺應用的成敗,所以機器視覺應用前的準備工作至關重要。
01、視覺引導機器人定位抓取
視覺引導機器人定位抓取系統是利用機器人視覺實現工件抓取點的視覺定位,再將定位數據發送工業機器人,實現由視覺信息引導機器人定位到工件的抓取點并完成抓取任務的系統。 系統框架主要由機器人視覺、 上位機、工業機器人和抓取目標組成。其中,機器人視覺包括相機、鏡頭、光源和視覺軟件,主要負責圖像采集和圖像處理實現工件抓取點的視覺定位。 上位機負責通過以太網將工件抓取點的位置數據發送給工業機器人,最后, 機器人接收工件抓取點的定位數據,實現視覺信息通過控制器引導機器人本體運動到工件抓取點,并由機器人的工具完成抓取、 放置工件的任務。
02、視覺引導和定位
機器視覺采用先進的圖像視覺檢測技術,對高速運動的工業產品進行實時全面的視覺定位分析,此功能主要用于自動裝配及生產。機器人視覺引導—引導是使用機器視覺來報告組件的位置和方向。在自動化生產流水線中,通過機器視覺系統實時了解機器人在操作過程中、工作環境中的變化,并作出相應調整動作以保證任務的正確完成。機器人視覺定位—要求機器視覺系統能夠快速準確的找到被測零件并確認其位置,上下料使用機器視覺來定位,引導機械手臂準確抓取。 機器視覺引導就是使用機器視覺報告元件的位置和方向。 需要引導的原因可能有很多,我們主要從以下幾點看看。1、機器視覺系統可以定位元件的位置和方向,將元件與指定的公差進行比較,并確保元件處于正確的角度以驗證元件是否正確組裝。2、引導可用于將元件在2D或3D空間內的位置和方向報告給機器人或機器控制器,讓機器人能夠定位元件或機器,以便對齊元件。3、與在許多任務中進行手動定位相比,機器視覺引導可以實現更高的速度和精度。例如將元件放在托盤上或從托盤上取下元件;對傳送帶上的元件進行包裝;對元件進行定位和對位,以便與其他零件組裝在一起;將元件放在工作架上;或從包裝盒中取出元件。4、引導也可以與其他機器視覺工具配合使用,這是機器視覺的非常強大的功能。因為在生產過程中,元件可能會以未知的方向呈現給相機。通過定位元件并將其他機器視覺工具與該元件對齊,機器視覺可以實現自動工具定位。
03、機器視覺元件定位的重要性
在機器視覺應用之前,元件定位是非常關鍵的第一步。 如果圖案匹配軟件工具無法在圖像中準確定位元件,則它將無法引導,識別,驗證,計數或測量元件。盡管聽起來很簡單,但是在實際生產環境中,元件外觀上的差異可能會使這一步驟變得非常困難。因照明或遮擋而出現的外觀變化可能導致元件定位變得困難,雖然視覺系統經過培訓,基于圖案來識別元件,但即使是最嚴格控制的流程,也允許元件外觀存在一定的變化。
元件呈現或姿勢畸變影響也可能導致元件定位變得困難要實現精確、可靠、可重復的結果,視覺系統的元件定位工具必須具備足夠的智能,能夠快速、精確地將培訓圖案與生產線上移動過來的實際物品進行比較。

04、案例應用
從測量、識別、檢測等角度出發全方位進行定位和引導的研究,通過對圖片中的不同類別、位置的對象進行定位和分類,實現對圖片不同缺陷特征的定位和檢測。 通過標注,即可建立目標模板,經過深度學習訓練,便可解決平移、旋轉、縮放和光線等影響。可學習圖像中的多個目標,并同時檢測,給出所有被識別目標的位置和定義。 根據具體問題具體分析,提出各類機器視覺技術定位與引導方案,較低成本地解決各類定位與引導的技術問題。手機外殼無序抓取、定位引導方面的應用
手機作為移動互聯網的主要終端,需求量逐年遞增,所以手機外觀是質量的一個重要指標,消費者對于手機質量也提出了更高的品質要求。傳統的手機檢測采用人工檢測的方法,這種方法檢測效率低下,易疲勞,難以長期持續化生產,增加勞動力成本,由于人工主觀因素,產品一致性和穩定性難以保證,生產信息也難以統計和追溯,很難滿足現在制造業對產品生產過程自動化和信息化的要求。
低代碼開發平臺可實現不同姿態和不同位置無序抓取的定位引導。
工作流程:●產品移動到拍照工位; ●觸發相機對手機殼進行拍照; ●視覺軟件識別圖像特征,對手機殼定位; ●發送手機殼指定中心坐標信息給機械手或PLC; ●機械手移動準確抓取手機殼。
機器視覺引導在許多任務中都能夠實現比人工定位高得多的速度和精度,比如將元件放入貨盤或從貨盤中拾取元件;對輸送帶上的元件進行包裝;對元件進行定位和對位,以便將其與其他部件裝配在一起;將元件放置到工作架上;或者將元件從箱子中移走等。 如果你的工業生產線中需要用到類似的機器視覺:視覺檢測、視覺識別、視覺定位等技術,那么不妨和我們聊聊,我們會先根據你的需求分析,從專業的角度來給你一個合適的方案!
審核編輯:郭婷
-
機器人
+關注
關注
210文章
28196瀏覽量
206509 -
機器視覺
+關注
關注
161文章
4345瀏覽量
120108
原文標題:機器視覺技術中影響“視覺引導定位”最關鍵的因素是什么?
文章出處:【微信號:機器視覺沙龍,微信公眾號:機器視覺沙龍】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
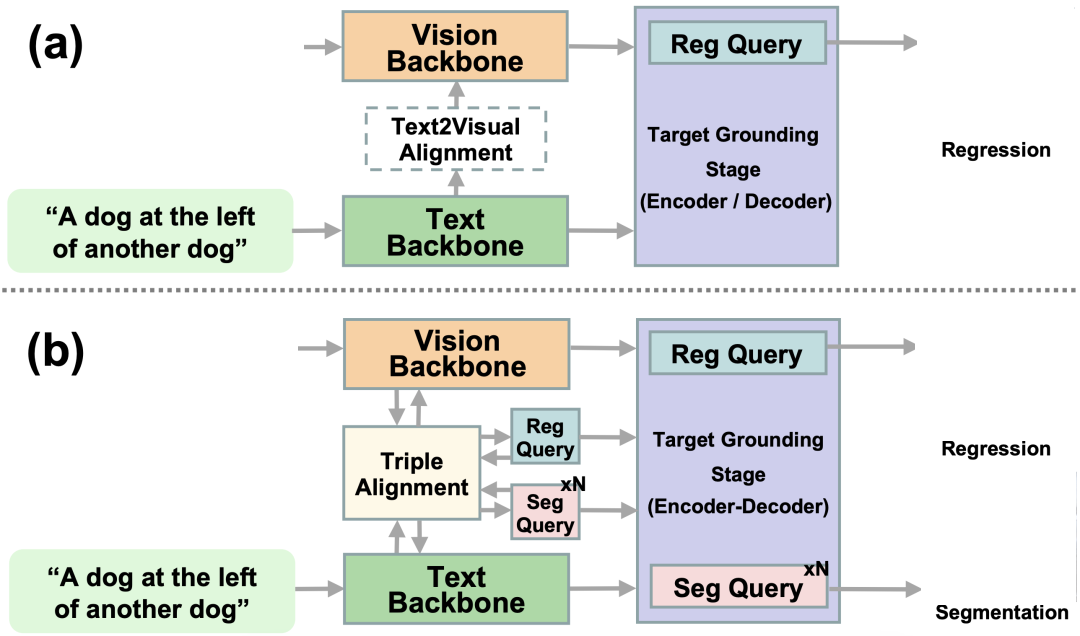
SegVG視覺定位方法的各個組件
基于機器視覺的鐵路轉轍機精準定位與故障抓取自動化解決方案
NLP技術在人工智能領域的重要性
視覺檢測在塑膠件的重要性

蜂鳴器的用途和重要性
泰克示波器探頭校準的重要性及步驟詳解
什么是機器學習?它的重要性體現在哪







 工商網監
工商網監
評論