 激光穩定系統中如何實現光路的閉環控制?
激光穩定系統中如何實現光路的閉環控制?
激光穩定系統可用于抵消或糾正由外部振動或其他因素引起的光路變化。在成像、光通信等應用中起著至關重要的作用。最常用的方法是采用電學反饋回路,例如PI或PID類型。電光調制器可用來控制功率,且伺服系統帶寬很高。合理設計反饋電路對于實現在大帶寬范圍內有效抑制噪聲非常重要。
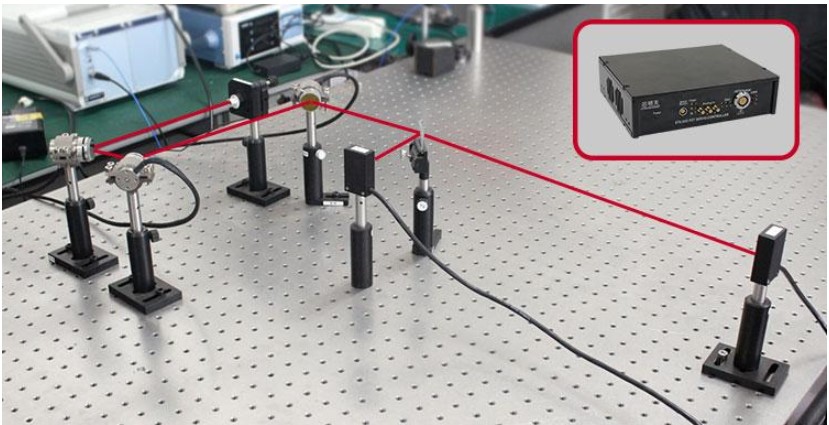
為了使得激光在傳輸過程中穩定,芯明天利用壓電偏轉鏡搭建了一階與二階的激光穩定系統。該激光穩定系統是采用外部PSD位置探測器進行閉環的壓電式激光偏轉穩定系統,預先設定了光束接收的目標位置坐標,光源通過干擾壓電偏轉鏡、補償壓電偏轉鏡的反射后,到達PSD位置探測器。其中,干擾壓電偏轉鏡就是為了模擬外界干擾的。
可根據光源的不同而選擇合適的系統,一階激光穩定系統適用于定位,而二階系統適用于定向。例如平行光,采用一階激光穩定系統即可;而點光源,因其光斑的位置會有偏移,需要額外的位置校正,則需要二階激光穩定系統來調節。兩種系統結構圖分別如下所示。
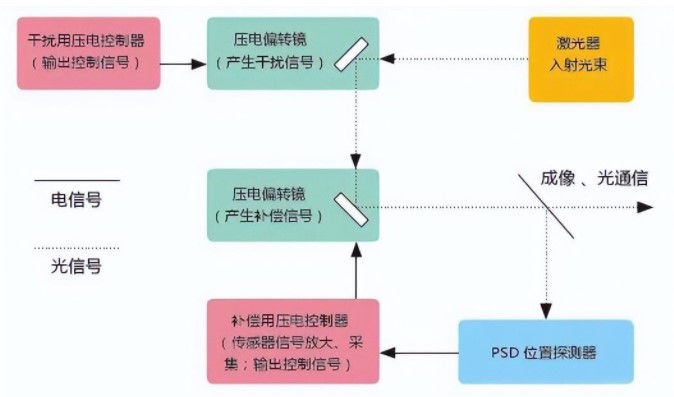
采用外部PSD位置探測器的一階快速壓電偏轉系統原理圖
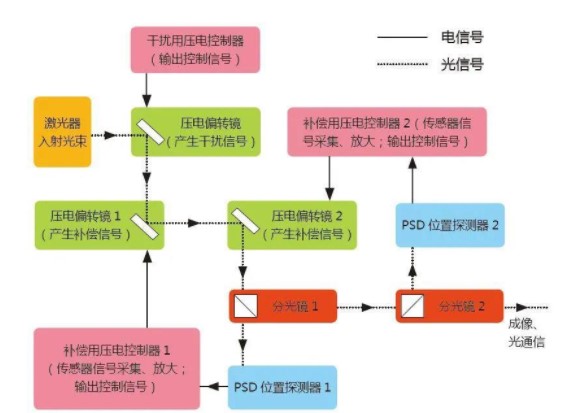
采用外部PSD位置探測器的二階快速壓電偏轉系統原理圖
在上述原理圖中,補償用壓電控制器是如何實現閉環控制補償光路偏差的呢?
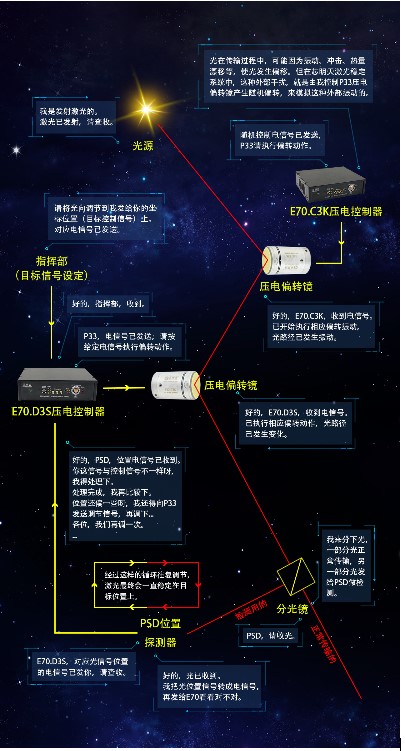
閉環控制過程
在該激光穩定系統中,閉環控制是通過芯明天壓電控制器配合外部PSD位置探測器模塊來完成的。
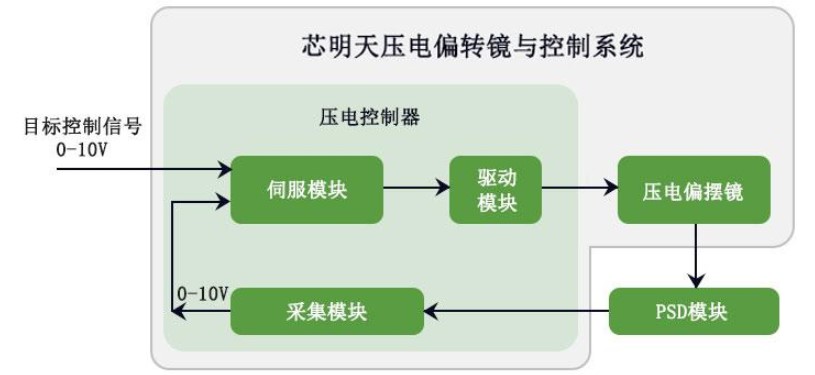
上圖中展示的是激光穩定系統閉環控制的過程,除外部PSD位置探測器與 0~10V目標控制信號外,其余部分是芯明天壓電偏轉鏡與壓電控制器系統。
該系統中,壓電偏轉鏡是執行部件,它控制反射鏡片的偏轉方向,即光路方向;而壓電控制器是閉環回路控制和電壓輸出源,左側淺綠色框內為壓電控制器的功能。
該激光穩定系統中具有兩個重要的信號,分別是控制信號和傳感反饋信號,在伺服模塊(包括比較和自適應調節)中進行處理,處理后的信號經過驅動模塊進行功率放大(包含電壓和電流放大)輸出,施加至壓電偏轉鏡,這樣就能驅動PZT壓電偏轉鏡進行偏轉。同時,壓電偏轉鏡的偏轉引起光路變化,使得PSD傳感反饋的信號也發生相應的變化,反饋信號被采集、處理,并進入伺服模塊,與目標信號進行比較,根據比較后的差值,進行控制信號的調節。控制信號再對輸出電壓進行調節,使得施加至壓電偏轉鏡的電壓變化,從而改變壓電偏轉鏡的轉向,改變光路...進行下一個循環,如此反復,將激光的最終位置穩定在目標位置上。
壓電控制器的功能
該激光穩定系統的閉環原理細節可通過壓電控制器的功能來解釋,如下概述:
1)功率放大
壓電偏轉鏡的驅動電壓一般需達到0~120V或150V左右,而控制輸入電壓通常較小,例如0~10V或0~5V等,因此,就需對控制輸入電壓進行放大,達到驅動壓電偏轉鏡的要求,施加至壓電偏轉鏡。
通過壓電控制器的功率放大,將輸入的目標控制模擬信號進行放大并輸出。
注:目標控制信號一般為0~10V,也可設定為其他范圍,可在采購時與區域銷售經理進行確認。
2)傳感信號的采集、處理、比較
隨著壓電偏轉鏡的轉向調節,PSD探測器接收到的光功率信號會發生變化。壓電控制器將對PSD位置探測器返回的電壓信號進行采集、處理、比較,對相應的偏差信號進行伺服調節,并放大輸出至壓電偏轉鏡,從而改變壓電偏轉鏡的偏轉方向。
綜上所述即為芯明天激光穩定系統的大致流程。PSD位置探測器可對光束的光斑進行實時位置檢測,并反饋給補償壓電控制器,補償壓電控制器對PSD位置探測器反饋的傳感器信號進行采集、處理、放大,同時向補償壓電偏轉鏡輸出相應的補償控制電壓信號,補償壓電偏轉鏡根據補償控制電壓信號進行快速角度調整,使得光信號準確、完整的接收,從而達到成像或光通信等目的。
壓電偏轉鏡內置傳感器與外部PSD閉環的區別
與采用內置傳感器的閉環版本壓電偏轉鏡相比,開環壓電偏轉鏡具有更快的響應速度及更高的分辨率,因此采用外部PSD位置探測器檢測,可提高光束的調整速度。另外,PSD可直接對光斑位置進行測量,是光束偏轉方向的直接反應。而內置傳感器的閉環版本壓電偏轉鏡的特點是使得控制電壓與偏轉角度間成線性關系,可保證壓電偏轉鏡的實際偏轉角度與預期控制調整的偏轉角度相一致。通過計算機顯示可觀看光束跟蹤及穩定情況。
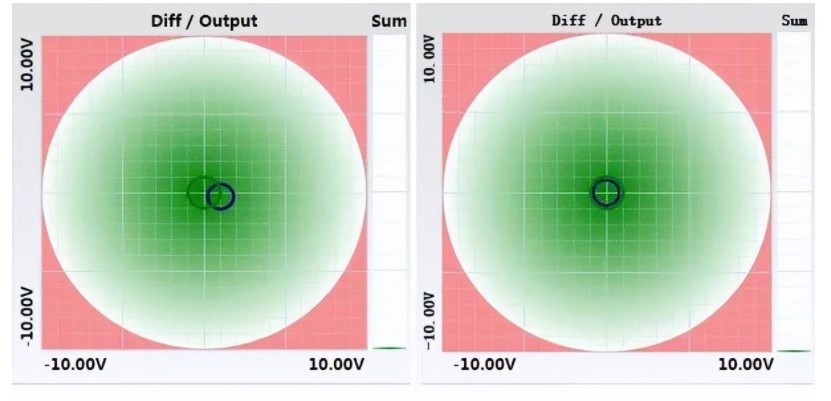
在該系統中,當開啟補償壓電偏轉鏡之前,位置探測器顯示的效果如下左圖中所示,光斑與目標位置間有偏移;而在開啟補償壓電偏轉鏡后,可從軟件中直觀的看到,光斑穩定在預先設定的目標位置,如下圖所示。
結束語
經過壓電偏轉系統的補償控制,使得光的傳輸更加精確穩定。其中重要的因素就是壓電偏轉鏡有超高的偏轉精度和超快的偏轉速度。芯明天P33.T2K壓電偏轉鏡與E70.D3S壓電控制器為整個激光穩定過程提供了納弧度級的偏轉精度及毫秒甚至亞毫秒的偏轉響應速度,這在該系統中起著決定性的作用。
-
激光
+關注
關注
19文章
3120瀏覽量
64363 -
閉環控制
+關注
關注
0文章
93瀏覽量
15583
發布評論請先 登錄
相關推薦

什么是開環控制什么是閉環控制 開環和閉環控制有何主要區別
開環控制和閉環控制的應用場景
PLC如何完成閉環控制及邏輯控制
控制系統中開環和閉環如何判斷
開環控制系統與閉環控制系統的區別
閉環控制系統的工作原理和基本組成
閉環控制系統的原理和組成
三相逆變器電壓閉環控制仿真
電機閉環控制中的編碼器二三事






 工商網監
工商網監
評論