") 使用深度學(xué)習(xí)實現(xiàn)海上雷達(dá)數(shù)據(jù)質(zhì)量控制自動化
使用深度學(xué)習(xí)實現(xiàn)海上雷達(dá)數(shù)據(jù)質(zhì)量控制自動化
作者:Dr. Rune Gangeskar, Miros
對海上船只來說,精確測量海浪、水流和對水航速非常利于執(zhí)行各種任務(wù),包括優(yōu)化燃油以及在受限海域內(nèi)航行。例如,即使對水航速測量失之毫厘,船舶性能計算結(jié)果也可能謬以千里,并且日耗油量可能增加數(shù)十噸。
一直以來,對水航速都是通過水下測速儀測量的。這些儀器利用船體的水壓差(水壓計程儀),通過聲吶信號的多普勒頻移(多普勒測速儀),或通過通電線圈與運動的水體之間的交互所生成的信號(電磁式測速儀)來估計航速。這些系統(tǒng)可能維護(hù)起來成本高昂,并且容易受到氣泡、紊流或其他由船只運動引起的干擾的影響。
Miros 設(shè)計了 Wavex 這款傳感器系統(tǒng),可以精確測量海浪、水流和對水航速。該系統(tǒng)可處理來自傳統(tǒng)海洋 X 波段導(dǎo)航雷達(dá)的數(shù)字化圖像,從而消除與水下傳感器相關(guān)的干擾問題和維護(hù)開銷。我們進(jìn)一步提高了 Wavex 的性能和可靠性,方法是使用深度學(xué)習(xí)網(wǎng)絡(luò)來自動識別在惡劣測量條件(例如強降水)下拍攝的雷達(dá)圖像(圖 1)。
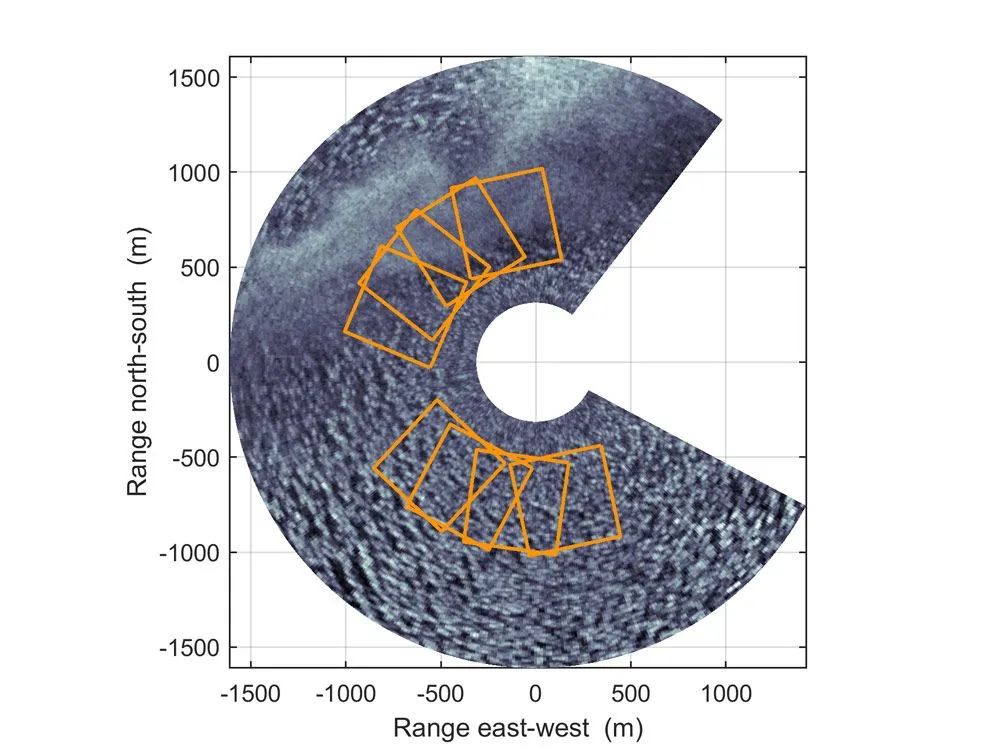
圖 1. 雷達(dá)圖像上半部分顯示受降水干擾的浪形。
在有陣雨的情況下,我們可以忽略雷達(dá)圖像中受干擾的區(qū)域,而只使用未受干擾的區(qū)域來獲得測量結(jié)果。我們使用 MATLAB 和 Deep Learning Toolbox 創(chuàng)建了深度學(xué)習(xí)網(wǎng)絡(luò)。該網(wǎng)絡(luò)可準(zhǔn)確識別降水和風(fēng)降,其準(zhǔn)確度分別超過了 97% 和 99%。
傳統(tǒng)的圖像處理算法需要針對不同測量條件、幾何形狀和雷達(dá)類型進(jìn)行校準(zhǔn)。與之不同的是,我們在 MATLAB 中設(shè)計的深度學(xué)習(xí)網(wǎng)絡(luò)無需進(jìn)行調(diào)整或校準(zhǔn),即可在各種測量場景下得到高度準(zhǔn)確的結(jié)果。在 MATLAB 中對該網(wǎng)絡(luò)進(jìn)行訓(xùn)練并驗證后,我們便使用 MATLAB Compiler 將其作為獨立應(yīng)用部署到 Wavex 系統(tǒng)中。該系統(tǒng)可近實時地測量對水航速、水流、定標(biāo)方向波譜以及浪高等綜合波浪參數(shù)(圖 2)。

圖 2. Wavex 用戶界面示例,顯示對水航速、風(fēng)和海浪的測量結(jié)果。
基于雷達(dá)的海況測量以及風(fēng)雨的影響
典型的海用 X 波段雷達(dá)天線以每分鐘 15 至 48 轉(zhuǎn)的速度旋轉(zhuǎn),從而生成浪形清晰可見的數(shù)字化圖像(圖 3)。Wavex 系統(tǒng)從數(shù)字化圖像中提取笛卡爾圖像部分,然后使用在 MATLAB 中開發(fā)的算法處理這些部分。這些算法應(yīng)用噪聲濾波技術(shù),并對笛卡爾圖像的時間序列執(zhí)行三維快速傅里葉變換 (FFT),從而生成三維波譜,其中包含關(guān)于各種波數(shù)和頻率下的功率的信息。然后,它們使用波數(shù)-頻率譜來估計水流和對水航速,以及定標(biāo)波譜和綜合波浪參數(shù)。
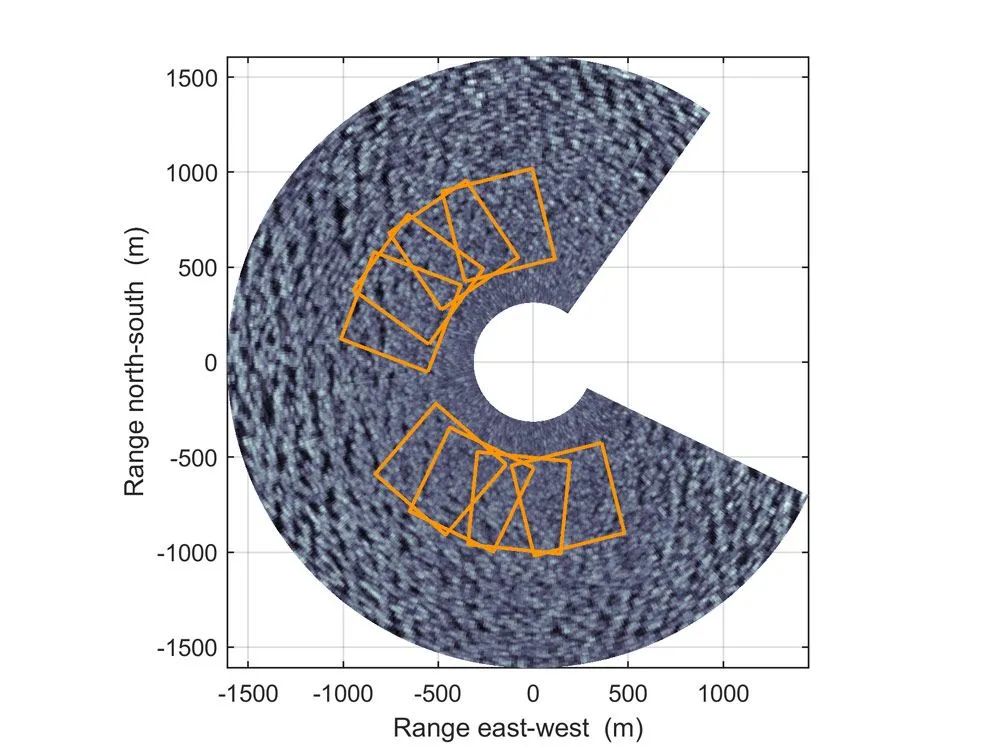
圖 3. 來自海用 X 波段導(dǎo)航雷達(dá)的數(shù)字化圖像輸出,顯示提取的笛卡爾圖像部分。
某些環(huán)境條件,如低風(fēng)速和陣雨,會導(dǎo)致數(shù)字化圖像失真,因而難以提取有意義的信息(圖 4)。我們使用深度學(xué)習(xí)是為了創(chuàng)建一個網(wǎng)絡(luò),以便自動識別那些過于失真而無法用于各種海況測量的笛卡爾圖像部分。
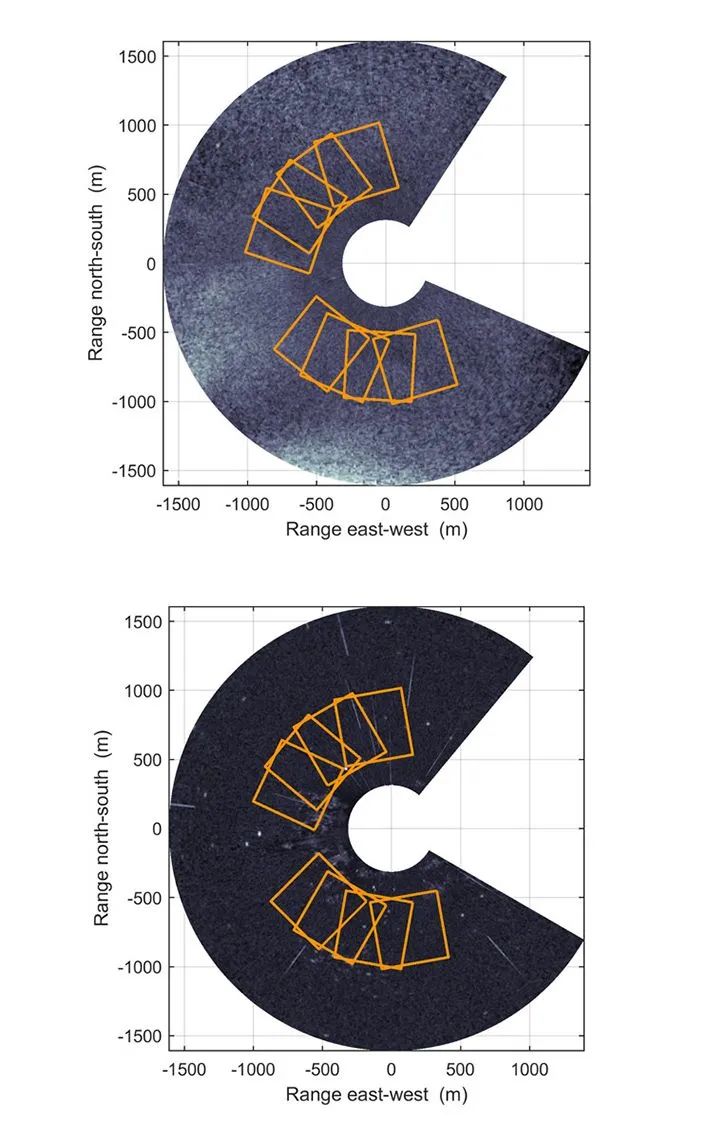
圖 4. 有降水(上圖)和風(fēng)速下降(下圖)的情況下拍攝的數(shù)字化雷達(dá)圖像。
深度學(xué)習(xí)在圖像分類中的應(yīng)用
要應(yīng)用深度學(xué)習(xí)處理圖像分類問題,第一步是獲取并標(biāo)注具有這些特征組合的圖像以訓(xùn)練網(wǎng)絡(luò)。為此,我們從六個不同的 Wavex 系統(tǒng)中采集了 700 多萬個笛卡爾圖像部分,這些圖像部分的時間跨度長達(dá)十年以上。
我們將每個圖像部分標(biāo)注為下面五個類別之一:無風(fēng)速下降或降水、有顯著降水、有顯著風(fēng)速下降、有顯著降水和風(fēng)速下降,以及未分類。為了減少所需的工作量并使標(biāo)注切實可行,我們采用了目測評估和自動標(biāo)注相結(jié)合的方法。其中,自動標(biāo)注使用其他來源的可用數(shù)據(jù),如從船載傳感器采集的風(fēng)數(shù)據(jù)。
與團(tuán)隊其他成員一樣,我用過 MATLAB 并對更經(jīng)典的機器學(xué)習(xí)主題有所了解,但我之前沒有深度學(xué)習(xí)應(yīng)用經(jīng)驗。我先從 Deep Learning Toolbox 教程入手,學(xué)習(xí)了使用簡單的卷積神經(jīng)網(wǎng)絡(luò)進(jìn)行深度學(xué)習(xí)圖像分類的示例。作為第一步,我試用了一些預(yù)訓(xùn)練模型,但我很快發(fā)現(xiàn),如果基于之前看到的代碼示例構(gòu)建自己的深度學(xué)習(xí)網(wǎng)絡(luò),效果可能會更好。我試驗了各種網(wǎng)絡(luò)配置,最終選定具有 23 層的配置。該網(wǎng)絡(luò)具有相當(dāng)標(biāo)準(zhǔn)的結(jié)構(gòu)。圖像輸入層后面有五個組,每個組都有一個二維卷積層、一個批量歸一化層、一個修正線性單元 (ReLU) 層和一個最大池化層。在最后一個組中,使用全連接層來代替最大池化層。此組后面接著 softmax 層和分類輸出層(圖 5)。
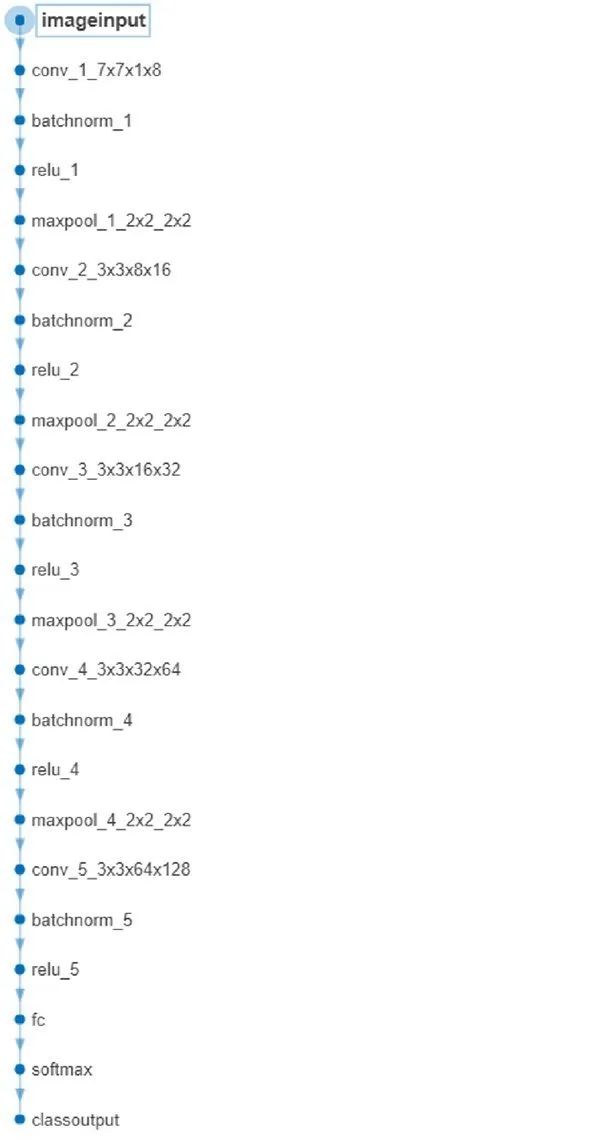
圖 5. 用于雷達(dá)圖像分類的網(wǎng)絡(luò)的結(jié)構(gòu)。
起初,我使用來自各個 Wavex 系統(tǒng)的數(shù)據(jù)來訓(xùn)練網(wǎng)絡(luò),然后確認(rèn)該網(wǎng)絡(luò)可以對來自其他系統(tǒng)的圖像進(jìn)行準(zhǔn)確的分類。然后,我結(jié)合使用來自所有系統(tǒng)的圖像對它進(jìn)行了訓(xùn)練,以提高針對各種雷達(dá)類型和工況的準(zhǔn)確度。最后,我試著對該網(wǎng)絡(luò)進(jìn)行了更改,以進(jìn)一步提高其準(zhǔn)確度。例如,我嘗試對第一個卷積層使用了不同大小,對圖像輸入層進(jìn)行了不同的歸一化,以及采用了不同的網(wǎng)絡(luò)深度。
部署和未來計劃
為了將最終經(jīng)過訓(xùn)練的網(wǎng)絡(luò)和算法集成到 Wavex 系統(tǒng)中,我使用 MATLAB Compiler 生成了獨立應(yīng)用。這樣,我們便能快速地將研發(fā)工作(模型開發(fā)和訓(xùn)練)遷移到生產(chǎn)環(huán)境中,以實現(xiàn)質(zhì)量控制自動化。
生成的應(yīng)用會掃描從船載雷達(dá)系統(tǒng)生成的極坐標(biāo)圖像中提取的每個笛卡爾圖像部分,并對這些部分進(jìn)行分類,然后將結(jié)果連同所有其他測量結(jié)果一起存儲在 Wavex 軟件可訪問的數(shù)據(jù)庫中。
在完成此集成后,我使用 MATLAB 可視化驗證了系統(tǒng)在各種條件下的性能:將使用自動風(fēng)降和降水檢測時的系統(tǒng)性能與禁用該檢測時的基準(zhǔn)性能進(jìn)行比較。圖 6 舉例說明了在情況復(fù)雜的一段時間內(nèi),基于深度學(xué)習(xí)的檢測如何準(zhǔn)確區(qū)分各種情況并正確標(biāo)注數(shù)據(jù),從而實現(xiàn)優(yōu)化的處理和改進(jìn)的用戶信息流。
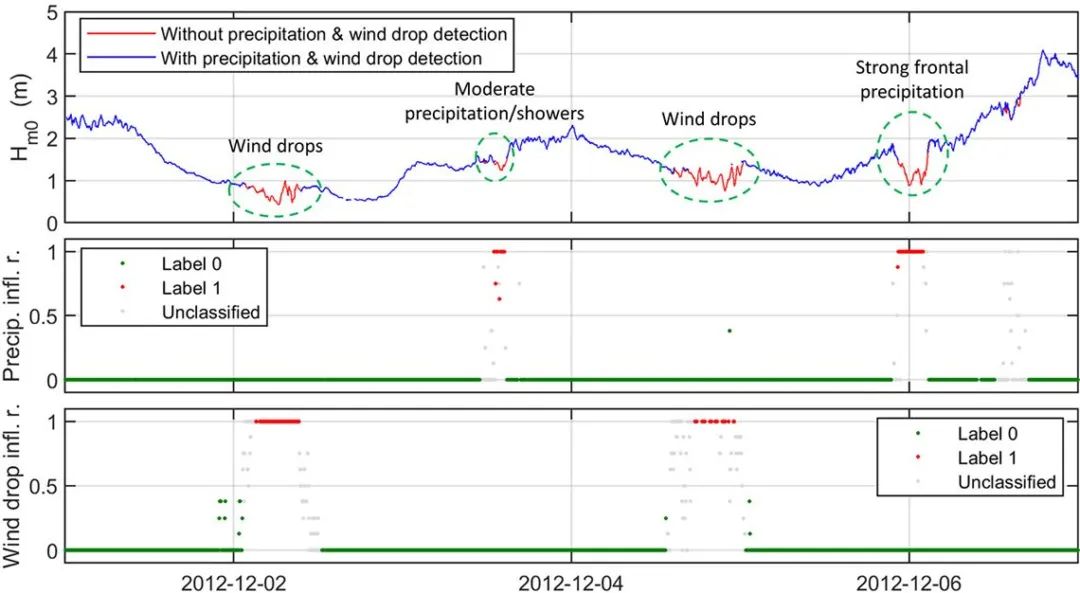
圖 6. 浪高測量結(jié)果圖,藍(lán)線表示啟用了降水和風(fēng)降檢測,紅線表示未啟用。
現(xiàn)在,獨立深度學(xué)習(xí)應(yīng)用正在多艘船上的生產(chǎn)級 Wavex 系統(tǒng)中接受測試。目前,我的團(tuán)隊正在研究如何在多個新的不同應(yīng)用中使用類似的深度學(xué)習(xí)方法進(jìn)行圖像和信號分類。
-
matlab
+關(guān)注
關(guān)注
182文章
2963瀏覽量
230195 -
深度學(xué)習(xí)
+關(guān)注
關(guān)注
73文章
5493瀏覽量
120999
原文標(biāo)題:無所不能的 MATLAB | 使用深度學(xué)習(xí)實現(xiàn)海上雷達(dá)數(shù)據(jù)質(zhì)量控制自動化
文章出處:【微信號:MATLAB,微信公眾號:MATLAB】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
工業(yè)自動化逐步向工業(yè)無線的轉(zhuǎn)變發(fā)展
機器視覺技術(shù)在質(zhì)量控制中發(fā)揮重要作用
實現(xiàn)工業(yè)自動化的市場阻礙
LabVIEW與Tektronix示波器實現(xiàn)電源測試自動化
工業(yè)自動化應(yīng)用的標(biāo)準(zhǔn)和控制器

PLC怎么實現(xiàn)自動化控制功能
工業(yè)自動化如何實現(xiàn)


CASAIM與大疆達(dá)成全自動化測量技術(shù)合作,CASAIM IS全自動化藍(lán)光測量儀實現(xiàn)無人機葉片全尺寸檢測及質(zhì)量控制





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論