") 淺析KUKA機器人氣伺服焊鉗虛擬外部軸的配置文件
淺析KUKA機器人氣伺服焊鉗虛擬外部軸的配置文件
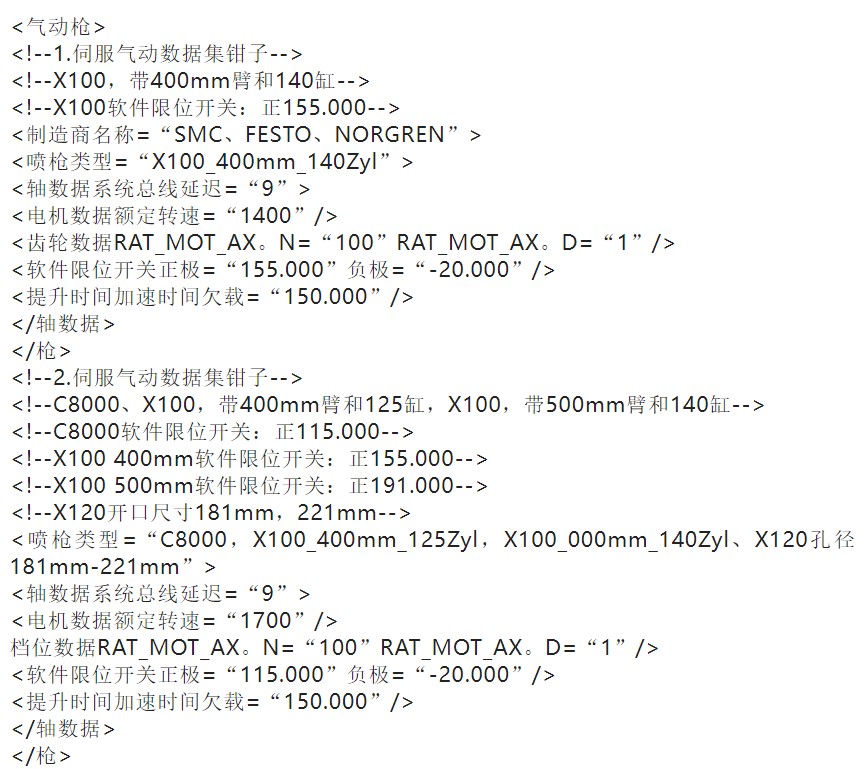
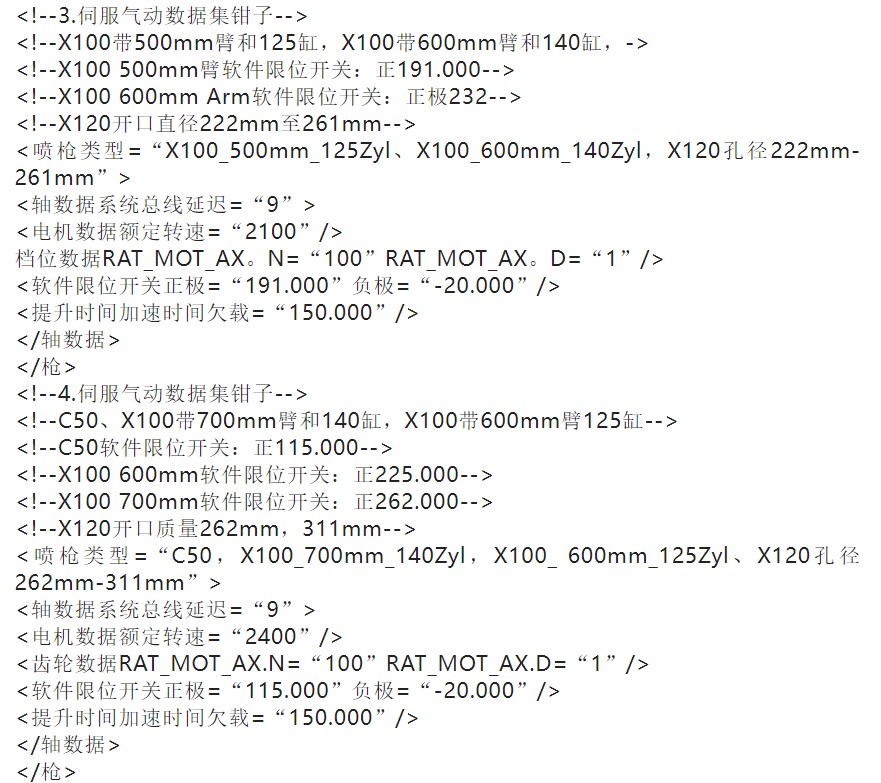
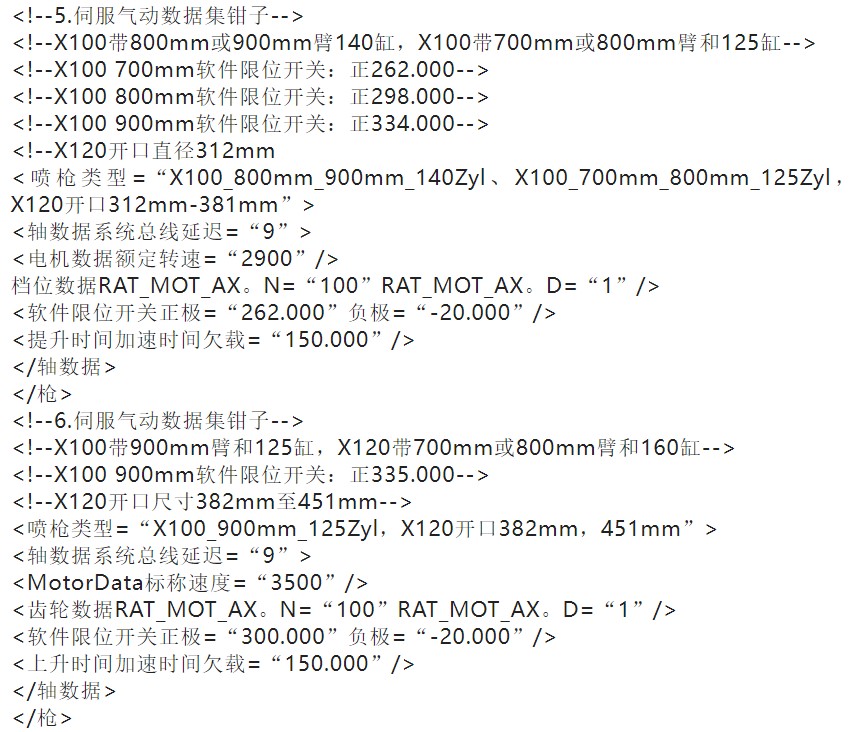
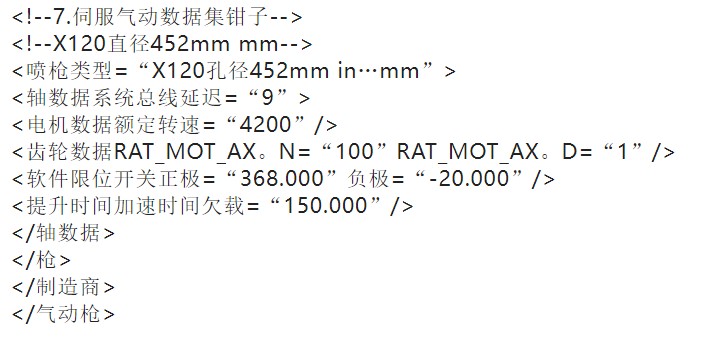
FESTO氣缸各型號
| ?90-150 | A | J | K |
| Verschl.T.Satz | 761861 | ||
| Ersatz. AD | 761879 | ||
| Ersatz.WMS | 761862 | ||
| ?100-160 | A | J | K |
| Verschl.T.Satz | 761863 | ||
| Ersatz. AD | 761880 | ||
| Ersatz.WMS | 761864 | ||
| ?100-184 | A | J | K |
| Verschl.T.Satz | 761863 | ||
| Ersatz. AD | 761880 | ||
| Ersatz.WMS | 763053 | ||
| ?125-90 | A | J | K |
| Verschl.T.Satz | 761865 | ||
| Ersatz. AD | 761881 | ||
| Ersatz.WMS | 761866 | ||
| ?125-160 | A | J | K |
| Verschl.T.Satz | 761865 | ||
| Ersatz. AD | 761881 | ||
| Ersatz.WMS | 761864 | ||
| ?125-184 | A | J | K |
| Verschl.T.Satz | 761865 | ||
| Ersatz. AD | 761881 | ||
| Ersatz.WMS | 763053 | ||
| ?125-248 | A | J | K |
| Verschl.T.Satz | 761865 | ||
| Ersatz. AD | 761881 | ||
| Ersatz.WMS | 763054 | ||
| ?140-150 | A | J | K |
| Verschl.T.Satz | 761873 | ||
| Ersatz. AD | 761874 | ||
| Ersatz.WMS | 761862 | ||
| ?160-90 | A | J | K |
| Verschl.T.Satz | 761876 | ||
| Ersatz. AD | 761877 | ||
| Ersatz.WMS | 761866 | ||
| ?160-150 | A | J | K |
| Verschl.T.Satz | 761876 | ||
| Ersatz. AD | 761877 | ||
| Ersatz.WMS | 761862 | ||
審核編輯:劉清
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關(guān)注
關(guān)注
210文章
27839瀏覽量
204604
原文標(biāo)題:KUKA機器人氣伺服焊鉗虛擬外部軸的配置文件
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
KUKA機器人問題解答
1 開機坐標(biāo)系無效 世界坐標(biāo)系是以槍頭為基點,在這種坐標(biāo)系中機器人所有的動作都是按照以槍頭為頂點來完成移動,XYZ方向切割槍方向不改變,如果機器人在世界坐標(biāo)系中移動,槍頭也隨著改變方向,那就是我們在
發(fā)表于 07-15 07:48
KUKA庫卡機器人伺服驅(qū)動器相關(guān)型號舉例
KUKA庫卡機器人伺服驅(qū)動器(Servo Drive)是KUKA運動控制的重要組成部分,被普遍應(yīng)用于工業(yè)機器人及數(shù)控加工中心等自動化設(shè)備中。
發(fā)表于 09-08 16:30
機器人系統(tǒng)與控制需求簡介
、KUKA、Yaskawa Motoman、FANUC2.2.1 本體結(jié)構(gòu)本體結(jié)構(gòu)分類:不同機器人建模控制的本質(zhì)區(qū)別關(guān)節(jié)型機械臂:串聯(lián)垂直多關(guān)節(jié)6軸機器人SCARA機械臂:笛卡爾機械臂
發(fā)表于 09-08 07:44
KUKA根據(jù)伺服焊提示報警信息,尋找故障源.
機器人在執(zhí)行焊接夾緊時出現(xiàn)故障,采用手動移動E1外部軸報錯:“EMZ: Freigabe gesetzt”,焊鉗不能移動,那是為什么呢?


簡單介紹KUKA外部軸應(yīng)用
對于舊的8.2X系統(tǒng)使用的外部軸插件是SynchroMove 對于最新8.3X系統(tǒng) 要分兩種: WorkVisualAddOnVKR: 用于氣伺服焊鉗和其他軟件控制電

KUKA機器人焊鉗銑削清零方式
= (!F329 !F322 !F830) + (F830 A786) 計數(shù)器清數(shù)改為0 KUKA機器人對電極帽更換的清數(shù)方式: bin3 ( F64 ) = 1 1號焊鉗對應(yīng)的BOSCH bin3
KUKA8.2系統(tǒng)下C4機器人虛擬外部軸E1的設(shè)置深層分析
SynchroMove軟件在 機器人D盤中的KUKA_OPT文件夾中。
VASS KUKA電伺服焊鉗的SG_Background控制
SERVOZANGE (伺服鉗):選擇焊鉗--在列表中只顯示已激活選項 后臺流程已激活 的焊鉗。
KUKA大眾版8.2系統(tǒng)外部軸配置
KUKA大眾版8.2系統(tǒng),配置外部軸需要在項目中進行設(shè)置選擇KPP1項目用于外部軸1和KPP2使
KUKA 機器人電伺服焊鉗配置
(請注意銘牌) 根據(jù)配置,將鉗子懸掛在單元配置中的機器人法蘭上。 機器人制鉗的電路如下: 配置焊槍信號 必須






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論