") 一種新型智能導盲車的研究與開發(fā)
一種新型智能導盲車的研究與開發(fā)
周 帥,魏佳豪,陳籽萌,鄒思奇,田豐源,趙琳博,謝印慶
(大連理工大學城市學院,遼寧 大連 116600)
摘 要 :近年來,視覺障礙者的數(shù)量急劇增加,而無障礙的區(qū)域卻變得越來越小。為了更好地幫助視覺障礙者像正常人一樣生活出行,從硬件設(shè)備和軟件系統(tǒng)兩方面設(shè)計了新型智能導盲車裝置。該導盲車由 STM32 嵌入式控制器、超聲波傳感器、紅外傳感器、音頻報警模塊、GPS 模塊和藍牙模塊構(gòu)成,多數(shù)據(jù)傳感器共同集成,實現(xiàn)了在視覺障礙者出行時可以依靠導盲車安全地行走。
0 引 言
近年來,盲人群體龐大,很多研發(fā)團隊都在致力于導盲輔助相關(guān)設(shè)備的研究。國內(nèi)目前的研究方向是以導盲杖 [1-2]和導盲眼鏡 [3] 為輔助工具,而國外的研究中心則是高端機器人。為此,本文研發(fā)了一輛以單片機為主硬件基礎(chǔ)并與軟件相結(jié)合的智能導盲車。該導盲車主要實現(xiàn)隨著環(huán)境的變化提供照明、遇到障礙物時語音提醒以及避障路徑檢測和實時定位的功能。
1 系統(tǒng)結(jié)構(gòu)設(shè)計與功能
智能導盲車運用STM32單片機作為主硬件基礎(chǔ),在此基礎(chǔ)上添加各種模塊集成,并與軟件相結(jié)合,進而實現(xiàn)對智能導盲車性能需求的研究。系統(tǒng)結(jié)構(gòu)如圖1所示。
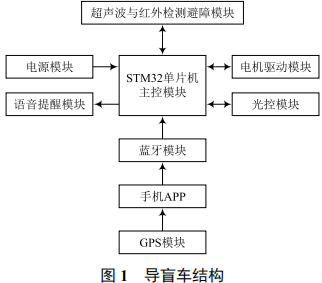
系統(tǒng)的超聲波模塊是主要的避障模塊,它實現(xiàn)對前方障礙物的感知并測距避障。GPS 模塊實現(xiàn)對小車的定位。電源模塊為整個系統(tǒng)提供能量。語音提醒模塊實現(xiàn)遇到障礙物時的報警功能。紅外避障模塊實時進行路徑檢測并實現(xiàn)對車身左右的障礙物進行避障。主控模塊是 STM32 單片機,同時也是整個硬件系統(tǒng)的核心,它可以實時處理傳感器傳輸過來的數(shù)據(jù),并根據(jù)所指示的命令做出應答。電機驅(qū)動模塊為導盲車提供機械能,使其具有機動性。光控模塊對盲人出行時的環(huán)境進行判決和照明。藍牙模塊實現(xiàn)單片機與手機間的通信,運用手機與導盲車相連接并操縱。
2 主要硬件模塊
2.1 主控模塊
以STM32F103ZE單片機作為主硬件控制系統(tǒng),目前市面上多應用 51 單片機和 15 單片機。從盲人行進安全系數(shù)等方面考慮,導盲車需要實現(xiàn)多種功能,保證數(shù)據(jù)信息采集的效率,因此對單片機的運行性能要求較高。文中選用 STM32單片機作為導盲車的主控芯片。STM32單片機資源豐富,可容納數(shù)百千字節(jié)的程序,也可移植RTOS、GUI中間件,時鐘頻率快、I/O口多、庫函數(shù)豐富,能夠滿足幾乎全部的應用需求。
2.2 超聲波避障模塊
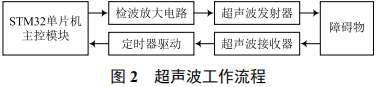
避障模塊使用超聲波HC-SR04傳感器[4-5]。該模塊的避障效果優(yōu)越,使用直流5V電壓,遠可在2~450 cm范圍內(nèi)探測出與障礙物的距離,如2 cm超近盲區(qū)等。超聲波避障的工作過程 :模塊的發(fā)送端發(fā)出超聲波時,定時器中斷開啟 ;當觸碰到障礙物時返回到接收端,定時器中斷就立即停止計時,經(jīng)過接收電路放大和整形后返回到單片機主控模塊。工作框圖如圖2 所示,測距是根據(jù)超聲波在空氣中的傳播速度C=340 m/s,記錄高電平持續(xù)的時間T,與障礙物距離S=TC/2[6]。為了實現(xiàn)模塊的避障功能,主要是在單片機所對應軟件程序里設(shè)置一個S的最大閾值,當設(shè)定的值小于閾值時,此時數(shù)據(jù)回歸到單片機,使小車做出相應的判斷以躲避障礙物,同時也會發(fā)出語音報警,提醒盲人當前遇到障礙物。
2.3 GPS 模塊
本設(shè)計所用的GPS模塊為 TTL-LEA,是一款簡單方便、實用易用的嵌入式開發(fā)的GPS 模塊,具有-144 dBm信號靈敏度、120 mW的極低功耗,使用方便。定位精度高達2.5 m,擁有標準SMA有源天線接口,支持NMEA-0183、UBX二進制通信協(xié)議 ;采用U-BLOX第五代GPS引擎,精度高、抗漫反射、抗干擾能力強。同時,該模塊在連接 GPS模塊后無須附加設(shè)備即可實現(xiàn)定位功能。
2.4 紅外避障模塊
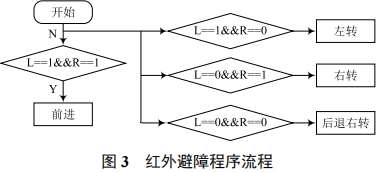
本文的紅外避障模塊采用HCRT5000紅外傳感器,該傳感器對外界光線有較好的適應能力,測距速度快。具有成本低、體積小、使用方便、檢測精度高等優(yōu)點 [7]。將紅外傳感器分別放于導盲車的左右兩端,用來感知左右兩側(cè)的障礙物。當左側(cè)紅外傳感器感知到障礙物時,傳感器的接收端將信號傳輸?shù)絾纹瑱C中,通過與設(shè)定的軟件系統(tǒng)的程序相結(jié)合進行判斷,從而使車右轉(zhuǎn)。同理,當右側(cè)紅外傳感器感知到障礙物時車會左轉(zhuǎn),兩側(cè)無障礙物時會前進,左右均有障礙物時車會后退并右轉(zhuǎn)。程序設(shè)計流程如圖 3 所示。
2.5 藍牙模塊
本設(shè)計使用HC-05藍牙模塊,采用非常快速的連接方式,就可以進行短距離數(shù)據(jù)間的傳輸。當前市面上也有通過WiFi模塊與硬件設(shè)備相連接的情況。但考慮到藍牙不需要依靠網(wǎng)絡(luò),且HC-05藍牙模塊具有功耗小、價格低廉、響應快、穩(wěn)定性好、使用簡單等優(yōu)點,僅占用單片機的一個串口,再通過藍牙通信技術(shù),就可以實現(xiàn)硬件設(shè)備與手機相連接 [8-9]。
2.6 電機驅(qū)動模塊
在導盲車的兩端各安裝一個步進電機充當車輪,并通過單片機調(diào)節(jié) PWM 的占空比和脈沖信號的頻率,控制兩個車輪的速度,速度不同時導盲車進行左右轉(zhuǎn)彎,速度相同時導盲車直行。本文使用ULN2003驅(qū)動芯片對步進電機進行驅(qū)動。與直流電機不同的是它通過輸入電脈沖信號,將脈沖信號變?yōu)檗D(zhuǎn)換角位移的機理,進而使小車移動。當前市面上廣泛應用直流電機和步進電機。相比較而言,步進電機結(jié)構(gòu)簡單、控制性能和機動性能優(yōu)越,盲人通過操縱手機 APP 可以使小車快速啟動和停止 [10],并且具有誤差不長期積累等優(yōu)點。綜上,考慮到總體的設(shè)計需求,導盲小車選擇使用步進電機。
3 軟件設(shè)計與調(diào)試
以上主要介紹了整個系統(tǒng)的硬件板塊,而一個完整的系統(tǒng)還需要軟件的支持。為此,需要將硬件模塊所支持的軟件程序燒錄到單片機上,將各傳感器收集到的數(shù)據(jù)通過杜邦線傳遞,與主控模塊相連接,主控模塊依據(jù)預設(shè)的軟件程序進行判斷和處理,最終整個系統(tǒng)的構(gòu)架搭建完成,使盲人能夠真正利用導盲車進行導盲。
4 結(jié) 語
為解決當前盲人出行問題,本文提出了一個以STM32單片機為控制核心的智能導盲車系統(tǒng)。系統(tǒng)中設(shè)計了驅(qū)動芯片、步進電機、超聲波和紅外避障傳感器、GPS等模塊。經(jīng)過實驗測試發(fā)現(xiàn),導盲車實際使用效果較為理想,解決了盲人出行困難的問題。
審核編輯:湯梓紅
-
單片機
+關(guān)注
關(guān)注
6032文章
44514瀏覽量
632975 -
gps
+關(guān)注
關(guān)注
22文章
2884瀏覽量
166035
原文標題:論文速覽 | 一種新型智能導盲車的研究與開發(fā)
文章出處:【微信號:iotmag,微信公眾號:iotmag】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
多功能導盲車系統(tǒng)設(shè)計與實現(xiàn)
一種新型過流保護電路的設(shè)計研究
【OK210申請】導盲機器人
怎樣去設(shè)計一種基于單片機STM32F103的智能拐杖導盲系統(tǒng)?
一種高效的代理多重盲簽名方案
基于FPGA和CCD的導盲系統(tǒng)的設(shè)計和實現(xiàn)
基于AVR MCU實現(xiàn)多功能導盲車系統(tǒng)的設(shè)計

以色列研究人員開發(fā)出了一種能夠識別不同刺激的新型傳感系統(tǒng)
如何使用機器視覺實現(xiàn)智能導盲眼鏡的設(shè)計






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論