 卡爾曼濾波器的遞歸算法
卡爾曼濾波器的遞歸算法
后面準備抽時間把DR_CAN老師的卡爾曼濾波的視頻的筆記也會做一下整理。
主要還是心里有個執念,以前在做智能車比賽的時候,需要對六軸傳感器做濾波角度計算的。這部分代碼則只是將學長的代碼copy之后,并不懂其中的原理。
所以其中的一個目的:就是把筆記做完,再看看原來的代碼,那是曾經的熟悉且鞭辟近里。
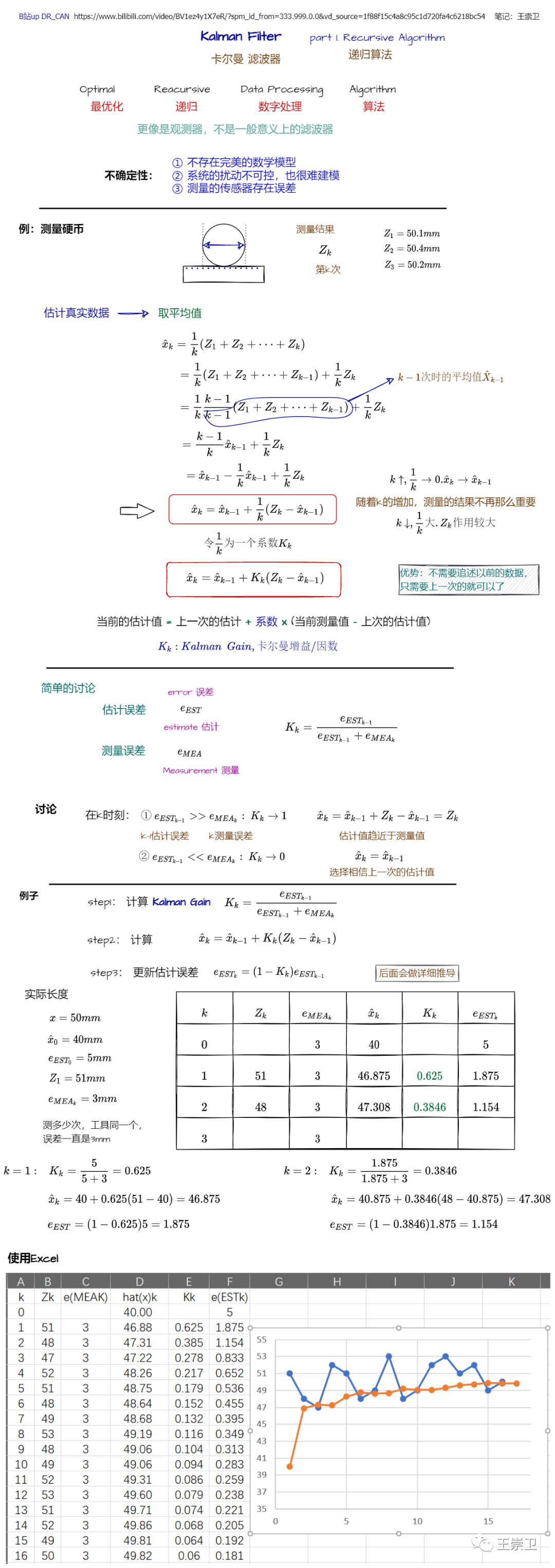
卡爾曼濾波器
更像是觀測器,不是一般意義上的濾波器。
現實中的大量不確定性
不存在完美的數學模型
系統的擾動不可控,很難建模
測量的傳感器存在誤差
卡爾曼增益
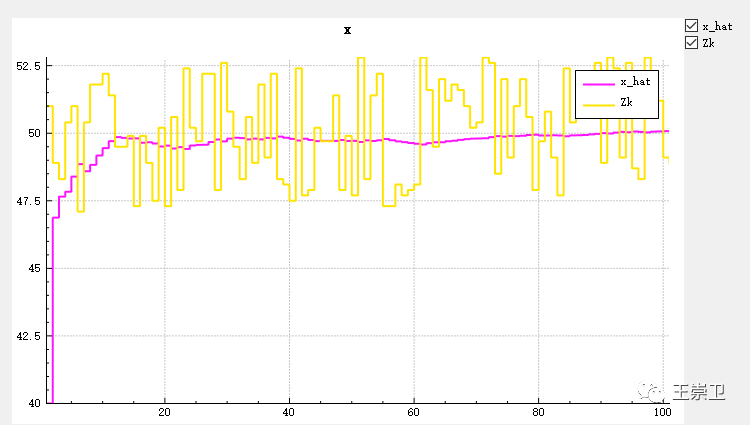
qt的仿真:
老師用Excel做的圖,我用ctrlsim也做了一個簡單的仿真。
https://gitee.com/wang_chong_wei/CtrlSim
https://github.com/chongweiwang/CtrlSim
CtrlSim_TI_SMO觀測器
[現代控制理論]3-5_連續系統離散化
CtrlSim_電機控制
審核編輯:湯梓紅
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
濾波器
+關注
關注
160文章
7749瀏覽量
177737 -
卡爾曼濾波器
+關注
關注
0文章
54瀏覽量
12178
原文標題:[卡爾曼濾波器]1_遞歸算法_Recursive Processing
文章出處:【微信號:王崇衛,微信公眾號:王崇衛】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
卡爾曼濾波器算法(C語言)
及噪聲協方差;估計階段由回歸模型代替狀態方程和觀測方程,相應的噪聲協方差實時自適應調整.該方法克服了傳統方法容易受系統動態模型不確定性和噪聲協方差不準確限制的問題,仿真結果驗證了算法的有效性卡爾曼
發表于 10-24 09:59

使用FPGA實現自適應卡爾曼濾波器的設計論文說明
在視頻圖像獲取過程中“由于噪聲對圖像序列的降質”需要設計實時噪聲濾波器。討論了視頻圖像的卡爾曼濾波問題及自適應卡爾
發表于 01-22 14:29
?22次下載
使用FPGA實現自適應卡爾曼濾波器的設計論文說明
在視頻圖像獲取過程中“由于噪聲對圖像序列的降質”需要設計實時噪聲濾波器。討論了視頻圖像的卡爾曼濾波問題及自適應卡爾
發表于 01-22 14:29
?13次下載
卡爾曼濾波器遞歸算法筆記整理
主要還是心里有個執念,以前在做智能車比賽的時候,需要對六軸傳感器做濾波角度計算的。這部分代碼則只是將學長的代碼copy之后,并不懂其中的原理。





 工商網監
工商網監
評論