 為什么選擇自適應AUTOSAR平臺?
為什么選擇自適應AUTOSAR平臺?
在我的上一篇文章中,我討論了虛擬 ECU,并且我非常強調 AUTOSAR 作為輕松交換軟件功能的基礎。然而,這一切都是關于經典的 AUTOSAR,或者更準確地說,是 AUTOSAR 經典平臺。但是在自動駕駛的背景下,大家都在談論自適應AUTOSAR,或者說AUTOSAR Adaptive Platform。
當自適應平臺第一次與客戶討論時,它基本上是這樣的:
客戶:“我們需要軟件架構的靈活性來進行無線更新。”
我:“你打算怎么做?”
客戶:“我們還不知道,但自適應 AUTOSAR 會。”
那是自適應平臺首次發布的幾個月前。因此,我們的期望很高,它們完全符合我的 dSPACE 同事已經在努力支持我們的軟件在環工具鏈中的“自適應”的渴望。
當然,每個人都應該知道一個基本事實:自適應 AUTOSAR 不是經典 AUTOSAR 的繼承者;它不會取代它。相反,它是定義 ECU 軟件以及它如何在 ECU 硬件或虛擬機上運行的另一種方法。
為什么選擇自適應 AUTOSAR平臺?
發明新平臺的原因是什么?AUTOSAR 的第一次啟動是在 2002 年,到今天為止,AUTOSAR Classic Platform 已經有一個成熟的版本 4。如果您正在尋找一個模塊化標準來編碼和交換汽車領域的嵌入式軟件,建議您用它。
但汽車行業正在重塑自我。隨著自動駕駛,對軟件架構的要求發生了根本性的變化。
請記住,我們的自動駕駛汽車必須:
與他們的環境交流。
使用大量傳感器觀察他們的環境。
使用這些數據來做出許多駕駛決定,其中大多數對我們的健康,有時甚至對生命至關重要。
讓我們把它翻譯成更專業的術語:
我們的汽車只是另一個設備,連接到一切。這可能包括您的智能家居,但它首先包括與數據后端、其他汽車和拐角處的交通信號燈的通信。
它使用媒體流。不是為您的孩子在后面,而是為不斷掃描環境并生成大量數據以確保您的高速公路飛行員或緊急休息工作的傳感器。
它需要足夠的計算能力來運行經過全面訓練的最先進的神經網絡來解釋傳感器數據并做出正確的決定。
購買后必須定期使用最新軟件進行更新,并且我們不希望在商店中閃爍 ECU 的麻煩。
這些項目只是部分自動駕駛和自動駕駛的注意事項示例。
它們對軟件的開發方式有著巨大的影響。
當您決定如何開發軟件時,您還必須決定特定的軟件架構,并且您不會輕易做出決定。每個軟件架構都有一個目的。
使用 AUTOSAR 經典平臺,您可以設計具有特定目標的軟件架構。這都是關于“深度嵌入”的軟件:
它在小型專用硬件上運行(就計算能力而言)。
它是為 ECU 設計、創建和閃存的,然后它就可以工作——無需修改它。
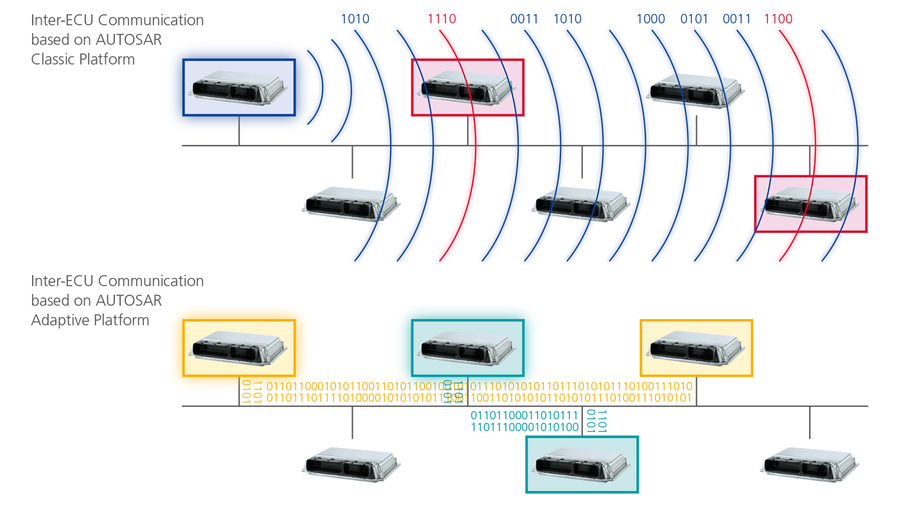
它的通信(主要)針對使用傳統汽車總線網絡(如 CAN)的相對較小數據包的循環廣播。
這些都不符合我們對上述自動駕駛的期望。僅從三個示例中,我們已經可以看到必須滿足新的要求:
必須在兩個或三個功能之間交換連續的傳感器數據流,而不是向整個網絡廣播的小數據包。
即使在圖形處理單元 (GPU) 的支持下,也有更多的計算能力可以真正快速地處理數字。
靈活的軟件,可以在運行時更換,也可以連接到最先進的網絡系統(不關心汽車使用哪種通信協議)。
AUTOSAR Classic 平臺并非專為自動駕駛而設計。因此,AUTOSAR 創建了自適應平臺——正是考慮到了新的要求。
靈活性是關鍵
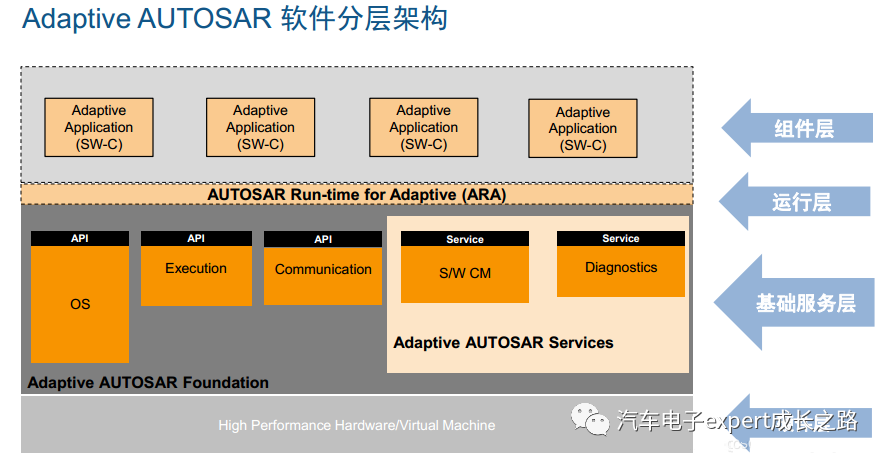
借助自適應平臺,軟件功能之間的通信不再以循環突發的方式進行,而是面向服務的。一個“自適應應用程序”(在經典平臺中稱為“軟件組件”)宣布它能夠提供哪些數據,以及它需要哪些數據。代理服務找到正確的匹配項,兩個應用程序直接通信。
更重要的是,底層通信不再基于CAN或其他使用專用協議的經典汽車總線系統,而是基于以太網。除了以太網通信之外,SOME/IP [http://some-ip.com] 目前正獲得更多關注。作為面向服務的中間件層,它定義了應用程序通信的實際方式。例如,您不再需要直接在代碼行為中定義循環觸發時間。
作為來自經典平臺世界的人,我在非嵌入式環境中理解在運行時替換軟件,但在 AUTOSAR 環境中則不然。原因很簡單:使用經典平臺,軟件組件之間的通信是硬連線的,并由 AUTOSAR 運行時環境 (RTE) 實現,它將通信從架構級別轉換到 ECU 級別。它通過解析靜態宏并將它們轉換為適當的基本軟件調用來做到這一點,例如,將它們包裝到總線消息中。
如果您想擁有可以在運行時更換的軟件,這是行不通的。自適應平臺通過實現面向服務的通信架構克服了硬連線通信的缺點。
因此,AUTOSAR 運行時環境的自適應版本(ARA,AUTOSAR Runtime for Adaptive Applications)獨立于實際應用程序工作。它只是提供代理服務。在任何需要它的應用程序之間建立通信。
最后的結果?您可以在運行時添加或替換軟件,因為只有在您啟動軟件后才會自動建立通信——這不是在設計階段確定的,不像在經典平臺中那樣。
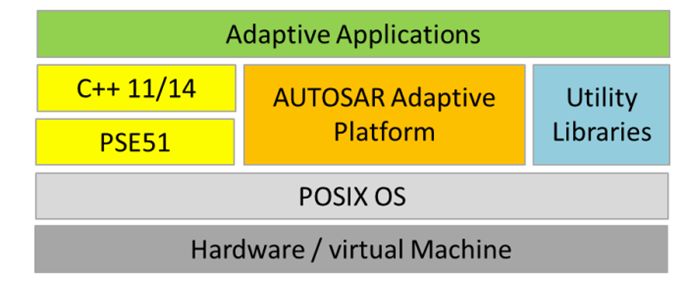
關于靈活性的最后一點說明:我們都知道最先進的自動駕駛系統,尤其是在傳感器數據處理方面,是在 Linux 系統上開發的。我們需要操作系統提供的所有靈活性,包括靈活的內存分配、線程處理等等。我們不想——也可能不能——僅僅因為我們必須為專門的 ECU 操作系統編譯代碼而放棄這種靈活性。
因此,自適應平臺基于 POSIX 接口。通過將他們的應用程序部署到自適應平臺,開發人員現在可以利用他們鐘愛的 Linux 的所有優勢。那是一回事,不是嗎?
概括
我個人的結論是自適應平臺是經典平臺的姐妹。兩個平臺有相同的祖先,相同的總體意圖:提供開發高質量汽車軟件的方法和標準。
它們是互補的:經典平臺專門用于經典汽車領域的高效、深度嵌入功能,而自適應平臺則針對自動駕駛不斷發展的領域,具有該領域所需的所有靈活性,我們可以在軟件方面實現這一點架構、通信方式和處理能力。
因此,我們兩者都需要。
審核編輯:劉清
-
Linux系統
+關注
關注
4文章
591瀏覽量
27353 -
AUTOSAR
+關注
關注
10文章
350瀏覽量
21472 -
Posix
+關注
關注
0文章
36瀏覽量
9486 -
自動駕駛
+關注
關注
783文章
13682瀏覽量
166143
原文標題:自適應 AUTOSAR 如何實現自動駕駛
文章出處:【微信號:阿寶1990,微信公眾號:阿寶1990】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
自適應數字傳感器設計
在rockchip平臺怎樣去實現一套兼容多款wifi模塊的自適應框架呢
LabVIEW開發自適應降噪ANC
自適應的弱選擇壓縮采樣匹配追蹤算法
自適應控制的優缺點_自適應控制存在的問題及發展
自適應平臺產生背景_自適應平臺功能概述
AUTOSAR C++和MISRA C++集成和自適應開發
一文讀懂DDS和AUTOSAR Adaptive的集成
Elektrobit 為新一代 EB corbos Starter Kit 添加基于 AUTOSAR 自適應平臺的 OTA 更新功能

AP AUTOSAR是如何定義和管理自適應應用程序的呢?

AUTOSAR架構自適應平臺





 工商網監
工商網監
評論