") 高精度施肥系統(tǒng)設(shè)計與實(shí)現(xiàn)
高精度施肥系統(tǒng)設(shè)計與實(shí)現(xiàn)
摘 要 :精準(zhǔn)施肥是保證農(nóng)作物高產(chǎn)的關(guān)鍵,人工手撒和小型機(jī)械噴灑的施肥方式準(zhǔn)確度較低,容易造成化肥浪費(fèi)、肥料分布不均、環(huán)境污染等問題,影響農(nóng)作物產(chǎn)量。為此,本文設(shè)計并實(shí)現(xiàn)了一套包含配肥、混合、排肥和噴灑子系統(tǒng)的高精度施肥系統(tǒng)。其中,配肥子系統(tǒng)根據(jù)接收的配比方案過程,通過計量泵等器件控制化肥原液的流量,精確配置所需的液態(tài)化肥 ;混合子系統(tǒng)采用 SK 型靜態(tài)混合器對液態(tài)化肥與稀釋液進(jìn)行混合,通過化肥在混合器中周期性改變流動方向以實(shí)現(xiàn)良好的徑向混合或稀釋效果 ;排肥子系統(tǒng)中的電脈沖信號頻率影響步進(jìn)電機(jī)泵抽取液態(tài)化肥的速率,通過控制電脈沖信號精確把控泵出液態(tài)化肥的流量 ;噴灑子系統(tǒng)采用內(nèi)螺紋霧化噴頭,基于控制泵出液態(tài)化肥的壓力改變霧化粒徑及霧化角的大小 ;通過 4 個子系統(tǒng)對施肥過程的精確把控,最終實(shí)現(xiàn)高精度施肥。
0 引 言
我國是一個農(nóng)業(yè)大國,也是化肥生產(chǎn)和消費(fèi)大國。化肥的使用是保持農(nóng)作物高產(chǎn)的關(guān)鍵,但我國在農(nóng)業(yè)方面對化肥的利用率一直處于較低水平。目前,我國農(nóng)業(yè)施肥過程一直沿用人工手撒以及小型機(jī)械噴灑的作業(yè)方式,導(dǎo)致施肥量不能精確把控,或施肥量遠(yuǎn)遠(yuǎn)大于農(nóng)作物的實(shí)際需求量,這不僅僅造成化肥的浪費(fèi),多余的化肥還會流至水體、土壤,直接危害農(nóng)田周遭的環(huán)境 ;老式的作業(yè)方式極易導(dǎo)致肥料在田間分布不均勻,影響農(nóng)田產(chǎn)量 ;且這種作業(yè)方式對人工的依賴性極高,效率低下,無法高效提升經(jīng)濟(jì)效益。
在可持續(xù)發(fā)展的背景下,農(nóng)業(yè)的可持續(xù)發(fā)展也受到越來越多人的關(guān)注 [1]。要實(shí)現(xiàn)農(nóng)業(yè)的可持續(xù)發(fā)展,推行精準(zhǔn)農(nóng)業(yè)是關(guān)鍵。精準(zhǔn)農(nóng)業(yè)的實(shí)施有助于實(shí)現(xiàn)經(jīng)濟(jì)效益、環(huán)境效益及生態(tài)效益的平衡發(fā)展 [2-3]。而推行精準(zhǔn)農(nóng)業(yè)就需要一套高精度的施肥系統(tǒng)把控施肥各個環(huán)節(jié)。本文提出并設(shè)計了一套包含配肥子系統(tǒng)、混肥子系統(tǒng)、排肥子系統(tǒng)以及噴灑子系統(tǒng)的高精度施肥系統(tǒng),用于控制施肥流程以實(shí)現(xiàn)施肥的精確性。
1 系統(tǒng)需求分析
本系統(tǒng)從實(shí)際應(yīng)用出發(fā),根據(jù)農(nóng)田的基本狀況人工輸入化肥的配比方案,系統(tǒng)根據(jù)配比方案精確配制化肥,并使配置完成的液態(tài)化肥與稀釋液在噴出前實(shí)現(xiàn)均勻混合,在區(qū)域內(nèi)進(jìn)行精準(zhǔn)噴灑。綜合考慮之后系統(tǒng)功能需求如下 :
(1)根據(jù)配比方案精確配肥 ;
(2)已配肥料與稀釋液均勻混合 ;
(3)單位時間內(nèi)對排肥量進(jìn)行控制 ;
(4)區(qū)域內(nèi)精確噴灑。
2 系統(tǒng)設(shè)計
2.1 系統(tǒng)構(gòu)成
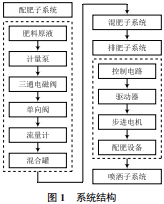
本系統(tǒng)主要由配肥子系統(tǒng)、混肥子系統(tǒng)、排肥子系統(tǒng)以及噴灑子系統(tǒng)組成,系統(tǒng)構(gòu)成如圖 1 所示。
2.2 系統(tǒng)功能概述
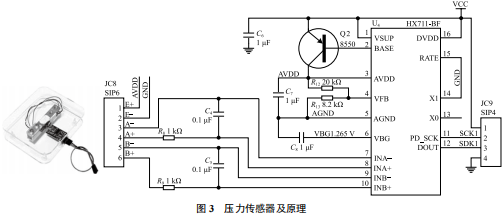
配肥子系統(tǒng) :配肥子系統(tǒng)根據(jù)接收的配比方案,精確配制所需的液態(tài)化肥。通過計量泵等器件使液態(tài)化肥的配制更加精確,系統(tǒng)內(nèi)置的壓力傳感器能夠檢測化肥原液的剩余量,反饋化肥原液的剩余信息。
混肥子系統(tǒng) :混合子系統(tǒng)將已經(jīng)配制完成的液態(tài)化肥進(jìn)行進(jìn)一步稀釋,以達(dá)到化肥噴灑要求。混合系統(tǒng)采用 SK 型靜態(tài)混合器對液態(tài)化肥與稀釋液進(jìn)行均勻混合。
排肥子系統(tǒng) :排肥子系統(tǒng)主要由控制電路、驅(qū)動器、步進(jìn)電機(jī)等設(shè)備組成,控制電路用于接收排肥信息并計算出相應(yīng)的電脈沖信號傳輸至驅(qū)動器,驅(qū)動器根據(jù)電脈沖信號驅(qū)動步進(jìn)電機(jī),最后由步進(jìn)電機(jī)完成排肥。
噴灑子系統(tǒng) :噴灑子系統(tǒng)實(shí)現(xiàn)液態(tài)化肥的精確噴灑,所采用的內(nèi)螺紋噴頭可以根據(jù)泵出的壓力改變液態(tài)化肥的霧化狀態(tài)。
3 系統(tǒng)設(shè)計
3.1 配肥子系統(tǒng)設(shè)計
配肥子系統(tǒng)主要由計量泵、空壓機(jī)、三通電磁閥、單向閥、流量計、壓力傳感器和攪拌裝置組成。當(dāng)系統(tǒng)接收到配比方案后,根據(jù)各種肥料所需濃度計算出對應(yīng)的比例。配肥流程如圖 2 所示。
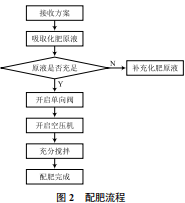
計量泵從肥料原液罐中吸取化肥原液,由于一般化肥原液的濃度較高,用量相對較少,采用計量泵吸取的方式可以更加精準(zhǔn)控制所需肥液。通過壓力傳感器(如圖 3 所示)實(shí)時檢測不同肥料原液的減少量,并使其始終與計算的比例保持一致,從而保證肥料的精準(zhǔn)配比。使用單向閥可以防止原液回流,使原液經(jīng)過流量計進(jìn)入混合罐。三通電磁閥的進(jìn)口分別接計量泵和空壓機(jī),出口接單向閥。當(dāng)計量泵停止吸取肥料時,關(guān)閉三通電磁閥與之相連的接口,打開與空壓機(jī)相連的接口 [4]。將壓縮氣體送入管道,高速流動的氣體可以將積累在運(yùn)輸管道內(nèi)的肥料原液吹落,提升配肥的精確性。為使不同的肥料原液充分混合溶解,在混合罐中使用攪拌裝置對混合肥料液進(jìn)行充分?jǐn)嚢琛A髁坑嬁梢蕴峁┓柿狭髁繀⒘康臏?zhǔn)確數(shù)值,使得系統(tǒng)在配肥過程中可以做出合理的判斷與調(diào)節(jié),從而通過調(diào)整計量泵的頻率實(shí)現(xiàn)優(yōu)良的控制。當(dāng)壓力傳感器檢測到原液余量不足時,系統(tǒng)能夠及時提醒使用人員對原液進(jìn)行補(bǔ)充。
3.2 混合子系統(tǒng)的設(shè)計
3.2.1 混肥子系統(tǒng)原理
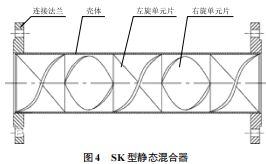
國內(nèi)靜態(tài)混合器按照其管內(nèi)固定部件的結(jié)構(gòu)分為 5 種類型 :SV 型(用 V 型波紋片)、SL 型(30°角組合金屬板)、SK 型(扭曲葉片)、SX 型(45°角組合板)和 SH 型(雙孔道及 180°左、右旋單元)[5],每種靜態(tài)混合器都有著不同的適用范圍。如圖 4 所示,SK 型靜態(tài)混合器內(nèi)部固定部件采用多個方向相反的螺旋結(jié)構(gòu),該設(shè)計在管道內(nèi)留有較大的空隙,不易堵塞,因此適合多種不同粘度的化肥混合或稀釋。當(dāng)化肥通過 SK 型靜態(tài)混合器進(jìn)行混合或稀釋時,化肥在混合器中會周期性改變流動方向以實(shí)現(xiàn)良好的徑向混合或稀釋效果。
本系統(tǒng)采用的化肥均為液態(tài)化肥,需要在混合罐內(nèi)通過混合器對液態(tài)化肥進(jìn)行稀釋并均勻混合,考慮到液態(tài)化肥的介質(zhì)特性、靜態(tài)混合器的易操作性和靜態(tài)混合器對液態(tài)化肥的混合效果,選用 SK 型靜態(tài)混合器進(jìn)行液態(tài)化肥的混合和稀釋。當(dāng)化肥配比完成并注入混合罐內(nèi)后,系統(tǒng)驅(qū)動直流水泵組中的水泵將液態(tài)化肥抽取出來并經(jīng)過 SK 型靜態(tài)混合器后重新注入混合罐中。因直流水泵流量可達(dá) 80 L/h,因此直流水泵僅需約 10 s 即可將混合罐內(nèi)的化肥和稀釋液混合均勻。
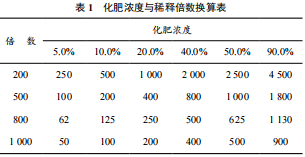
3.2.2 化肥稀釋倍數(shù)計算
在化肥的實(shí)際使用過程中,不能將配制好的化肥直接噴灑在農(nóng)作物表面,而是要把高濃度的化肥加稀釋液稀釋成濃度較低,適合農(nóng)作物使用的低濃度化肥,化肥稀釋可用以下經(jīng)驗(yàn)公式計算 :
稀釋倍數(shù) = 原化肥液濃度 / 所需化肥液濃度(1)如要將 20% 的化肥液稀釋成 0.02% 的化肥液,應(yīng)加稀釋液的量為 20/0.02=1 000 倍 [6],具體的化肥濃度與稀釋倍數(shù)換算見表 1 所列。
3.3 排肥子系統(tǒng)設(shè)計
3.3.1 排肥子系統(tǒng)控制原理
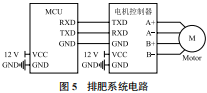
排肥子系統(tǒng)主要由單片機(jī)控制電路、驅(qū)動器、步進(jìn)電機(jī)及排肥設(shè)備組成。本系統(tǒng)需要根據(jù)輸入的單位時間排肥量,將信息輸入單片機(jī)控制電路,經(jīng)運(yùn)算得出所需的電脈沖信號。將此脈沖信號輸送至步進(jìn)電機(jī)驅(qū)動器,控制步進(jìn)電機(jī)變速轉(zhuǎn)動以控制單位時間的排肥量。控制電路如圖 5 所示。
3.3.2 步進(jìn)電機(jī)驅(qū)動器及步進(jìn)電機(jī)
步進(jìn)電機(jī)驅(qū)動板具有驅(qū)動步進(jìn)電機(jī)、調(diào)整步進(jìn)電機(jī)狀態(tài)的作用。本系統(tǒng)采用 kamoer 公司出品的步進(jìn)電機(jī)驅(qū)動器,通過通信總線 RS 232 調(diào)節(jié)步進(jìn)電機(jī)的轉(zhuǎn)動速度。
本系統(tǒng)采用 kamoer 公司出品的 KCM-S403 型步進(jìn)電機(jī),通過改變輸入的電脈沖信號頻率來調(diào)整步進(jìn)電機(jī)的轉(zhuǎn)動速度,由步進(jìn)電機(jī)的轉(zhuǎn)軸帶動排肥設(shè)備轉(zhuǎn)動,以完成排肥。一般情況下,電脈沖信號頻率越大,步進(jìn)電機(jī)的轉(zhuǎn)動速度越快,排肥量越大 ;反之,電脈沖信號頻率越小,步進(jìn)電機(jī)的轉(zhuǎn)動速度越慢,排肥量越小。
3.3.3 排肥量計算
本系統(tǒng)使用的步進(jìn)電機(jī)泵的管內(nèi)徑為 d=3 mm,支撐角度 θ=60°,泵殼圓周截面內(nèi)圓直徑 D=5 cm,滾輪直徑r=4 mm ;根據(jù)式(2)可以估算得出每旋轉(zhuǎn) θ 角度步進(jìn)電機(jī)泵輸送的液態(tài)化肥量 [7] 約為 :

式中,q 為單位時間內(nèi)步進(jìn)電機(jī)泵輸送的液態(tài)化肥量(m3/s),當(dāng)步進(jìn)電機(jī)以角速度 ω 旋轉(zhuǎn)時間 t 后,軟管內(nèi)可輸送的液態(tài)化肥量約為ωθt倍 Δq 的化肥量 [8],即:

步進(jìn)電機(jī)泵輸送體積為 Q 的化肥所需時間可使用式(4)計算 :

式中,t 為旋轉(zhuǎn)時間(s)。
3.4 噴灑子系統(tǒng)設(shè)計
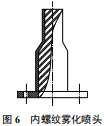
本系統(tǒng)采用頂部噴淋裝置實(shí)現(xiàn)施肥功能。噴淋采用內(nèi)螺紋霧化噴頭(如圖 6 所示),該噴頭能反映高流速煙氣下化肥的霧化液滴粒徑尺寸和分布特點(diǎn)。工作過程中可承載水量為 1.0 ~ 2.5 kg,噴灑直徑最大可達(dá) 1 m。為做到精確噴灑,每個花卉培養(yǎng)位置均位于各霧化噴頭的正下方,因?yàn)闉榉忾]環(huán)境,所以無需考慮風(fēng)力對霧化后水霧的影響。本系統(tǒng)通過輸入的位置信息確定開啟噴頭,花卉上方的霧化噴頭閥門打開,配置完畢的液態(tài)化肥被步進(jìn)電機(jī)泵至霧化噴頭,從而實(shí)現(xiàn)噴灑。噴頭內(nèi)部構(gòu)造不同,在調(diào)節(jié)旋鈕松緊程度統(tǒng)一的情況下,通過控制步進(jìn)電機(jī)泵的壓力輸出控制霧化噴頭噴口處的霧化狀態(tài)。
壓力和流量存在如下近似關(guān)系:

式中:P1 和 Q1 是第一狀態(tài)時的壓力和流量;P2 和 Q2 是第二狀態(tài)時的壓力和流量。
噴頭的霧化粒徑及霧化角的范圍與壓力及流量的關(guān)系 [9]見表 2 所列。
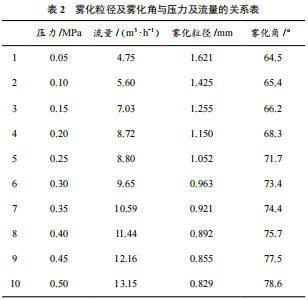
噴灑裝置如圖 7 所示。隨著壓力的增大,噴頭流量增大,霧化液滴的平均粒徑逐漸減小,并且隨著壓力的增大,霧化粒徑分布的范圍逐漸變窄 ;反之,隨著壓力的減小,噴頭流量減小,霧化液滴的平均粒徑逐漸增大,霧化粒徑分布的范圍逐漸變寬。即壓力大,小粒徑液滴所占比例大 ;壓力小,大粒徑液滴所占比例大。
4 結(jié) 語
傳統(tǒng)的施肥方式對人工依賴性極高,不僅提高了施肥的人力成本,更不能精確把控施肥流程,從而導(dǎo)致化肥利用率低下、環(huán)境污染嚴(yán)重以及農(nóng)作物產(chǎn)量下降。基于此,本系統(tǒng)設(shè)計了配肥子系統(tǒng)、混合子系統(tǒng)、排肥子系統(tǒng)以及噴灑子系統(tǒng)。系統(tǒng)通過對化肥配制、混合、噴灑等方面的嚴(yán)格把控,精確控制液態(tài)化肥的施肥流程,從而實(shí)現(xiàn)高精度施肥 [9]。

目前,本系統(tǒng)不能根據(jù)實(shí)際的環(huán)境狀況分析得出化肥的配制與施肥方案,而是需要人為輸入控制信息實(shí)現(xiàn)施肥。為此,下一步將研究針對土壤情況及自然環(huán)境狀況的信息采集系統(tǒng),并根據(jù)采集的信息計算合理的化肥配置與施肥方案,實(shí)現(xiàn)智能控制 [10]。
審核編輯 :李倩
-
高精度
+關(guān)注
關(guān)注
1文章
520瀏覽量
25433 -
混合器
+關(guān)注
關(guān)注
0文章
34瀏覽量
10140
原文標(biāo)題:論文速覽 | 高精度施肥系統(tǒng)設(shè)計與實(shí)現(xiàn)
文章出處:【微信號:iotmag,微信公眾號:iotmag】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
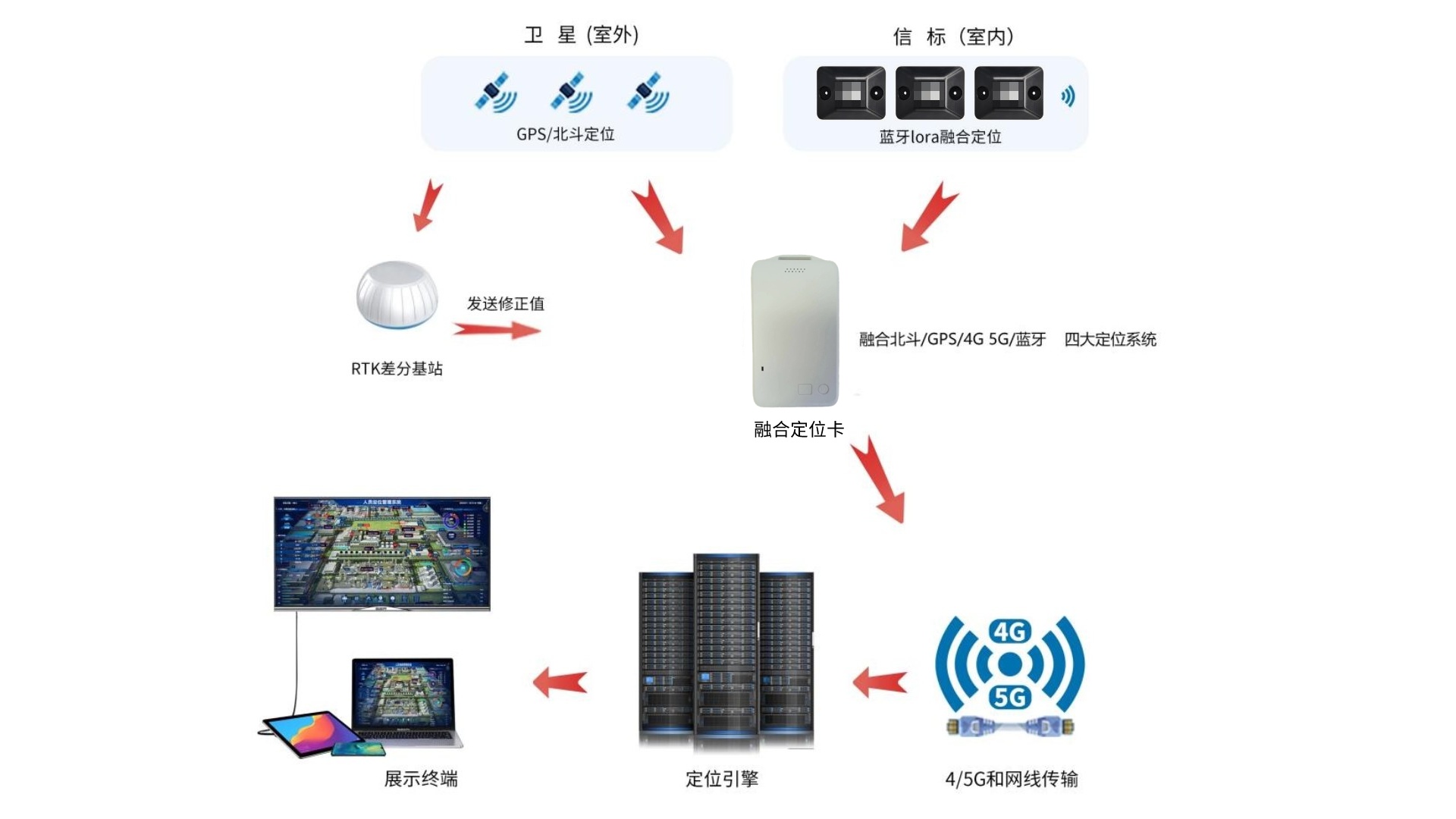
物聯(lián)網(wǎng)系統(tǒng)中高精度RTK定位方案的實(shí)現(xiàn)_高精度定位模塊

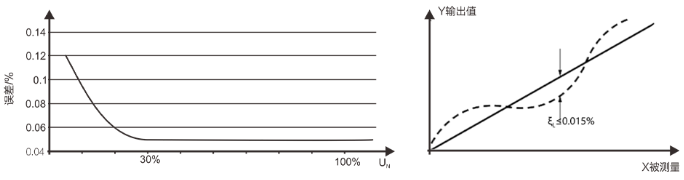
VS高精度電壓傳感器
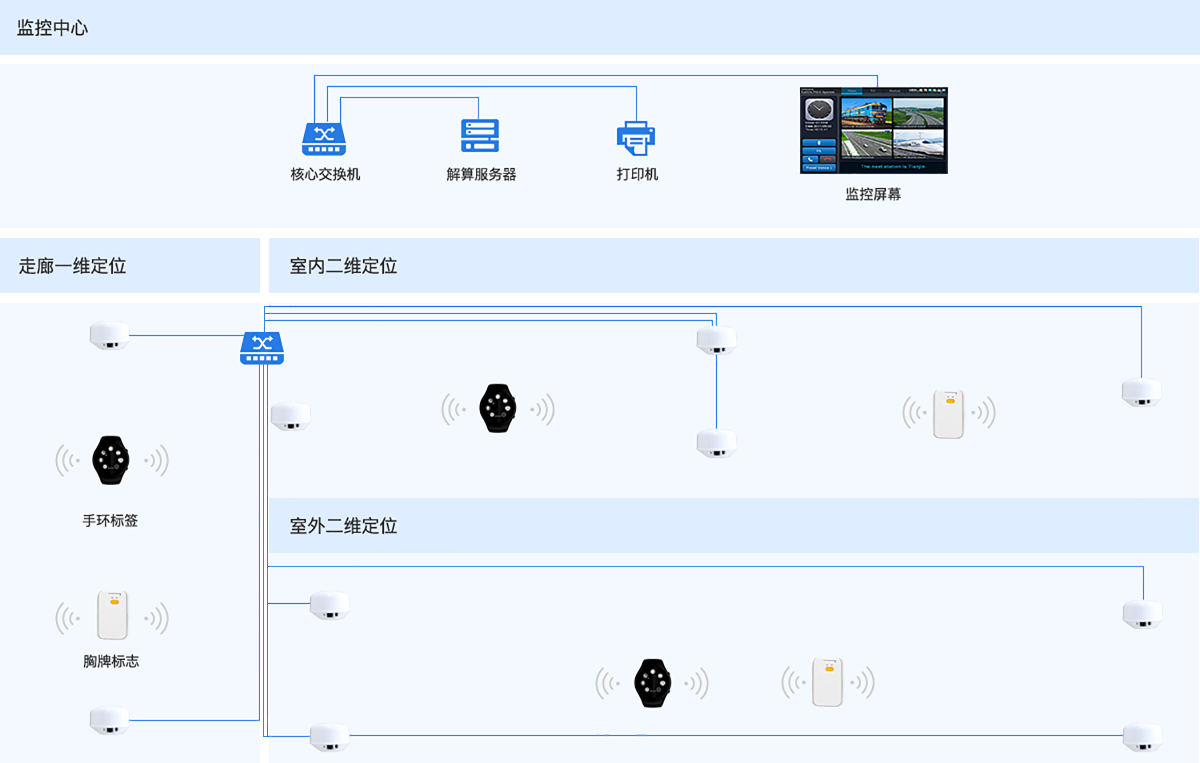
探索UWB技術(shù)的獨(dú)特優(yōu)勢:實(shí)現(xiàn)高精度定位
DACx1001實(shí)現(xiàn)超高精度閉環(huán)控制系統(tǒng)設(shè)計

藍(lán)牙AOA高精度定位系統(tǒng)效果怎么樣
工業(yè)制造領(lǐng)域高精度人員定位系統(tǒng)(源碼)
北斗RTK高精度定位系統(tǒng)介紹
什么是高精度定位平板?
北斗高精度定位終端的工作原理和精度范圍

隧道UWB高精度定位系統(tǒng)

雷尼紹 VIONiC高精度測量反饋產(chǎn)品助力高精度運(yùn)動控制系統(tǒng)

納秒激光焊接機(jī)如何實(shí)現(xiàn)高精度焊接
電感多少精度算高精度
激光掃描裝配間隙尺寸高精度檢測系統(tǒng)的設(shè)計與實(shí)現(xiàn)

Yaskawa安川電機(jī):實(shí)現(xiàn)高精度運(yùn)動控制的利器






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論