 認識一下并列刷寫(Parallel Flash)
認識一下并列刷寫(Parallel Flash)
我們知道,一輛車上的ECU數量少則幾十個,多則上百個。假設這樣一種場景,車輛由于某種原因導致一部分ECU功能失效,需要重新更新這些ECU的Application程序,如果一個一個進行更新,勢必花費一點時間,而作為消費者,總希望自己的車子能快點修好,維修人員又何嘗不是呢?所以,并列刷寫(Parallel Flash)和隊列刷寫(Queued Flash)來了。
再有,在車輛下線時EOL(End of Line),工廠追求效率,一般會1(刷寫上位機)拖N(N個 ECU)刷寫,這是不是一種Parallel Flash呢?
再次提示:Queued Flash針對 單個ECU ,Parallel Flash針對 多個ECU ,且兩種技術可以同時使用。本文,我們認識一下Parallel Flash。
1
整車網絡拓撲
在了解Parallel Flash之前,我們先認識一下整車網絡拓撲。為便于理解,我們簡單示意整車的網絡拓撲結構。整車網絡中,不僅僅只有Can總線,還會有Ethernet、Flexray以及Lin總線。
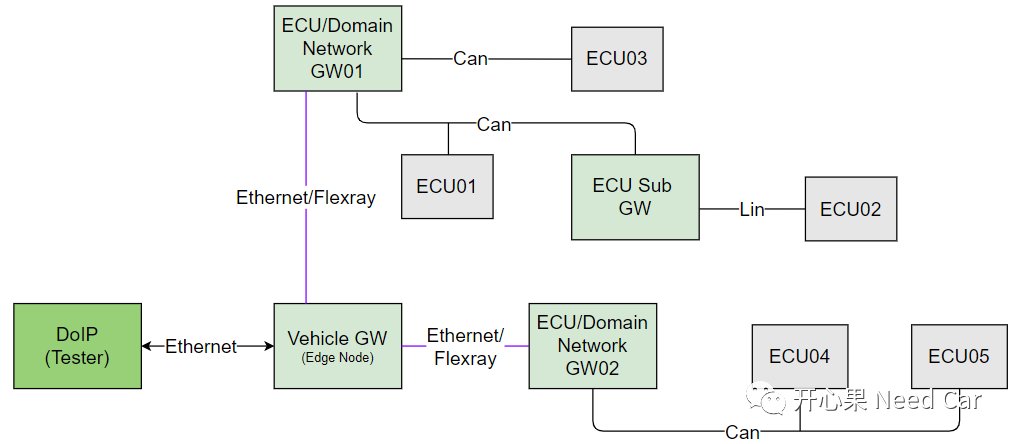
如上圖,整車中的網關可以分為三種類型:Vehicle GW(Edge Node)、ECU/Domain Network GW、ECU Sub GW。
Vehicle GW(Edge Node) :與外部設備(Tester)通過以太網通信,也稱為邊緣節點。邊緣節點與域網關通過主干網相連,主干網會選擇速率相對較高的總線,比如:Ethernet/Flexray。
ECU/Domain Network GW :域網關,整車會分為動力域、影音域等多個域。域網關與子網關或者終端ECU連接,之間可以通過速率相對低一些的Can/Lin總線通信。
ECU Sub GW :子網關,子網關之下會掛接終端ECU,子網關與終端ECU之間可以通過Can/Lin總線通信。
既然Ethernet的速率快,為啥還整這么多總線呢?誰家也不是地主,成本是每家OEM都很在乎的事,保證既定功能目標的前提下,OEM會想方設法地降成本,不然,如何適應叢林法則?Ethernet雖然快,但是成本高,所以,OEM的EE部門在整車的拓撲設計中,會考慮好總線的選擇。
2
Parallel Flash刷寫流程
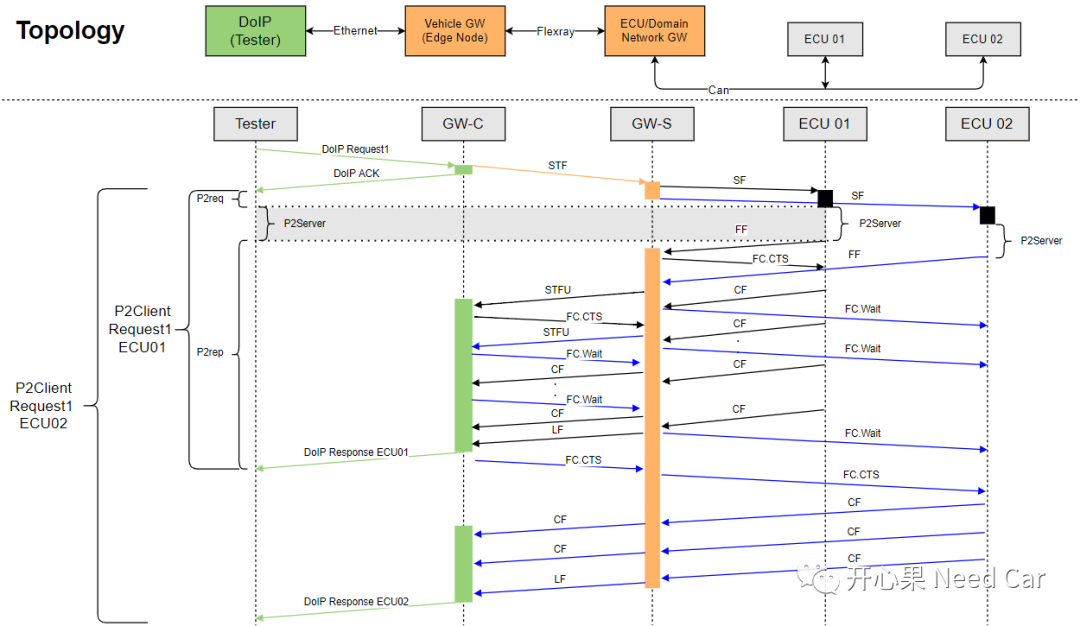
假設有兩個ECU:ECU01和ECU02需要同時刷寫,且ECU01和ECU02均掛接在子網關GW-S下,子網關GW-S在中央網關GW-C下,上位機(Tester)通過以太網(DoIP)進行刷寫。這里分兩種情況討論:
第一:GW的處理能力不足
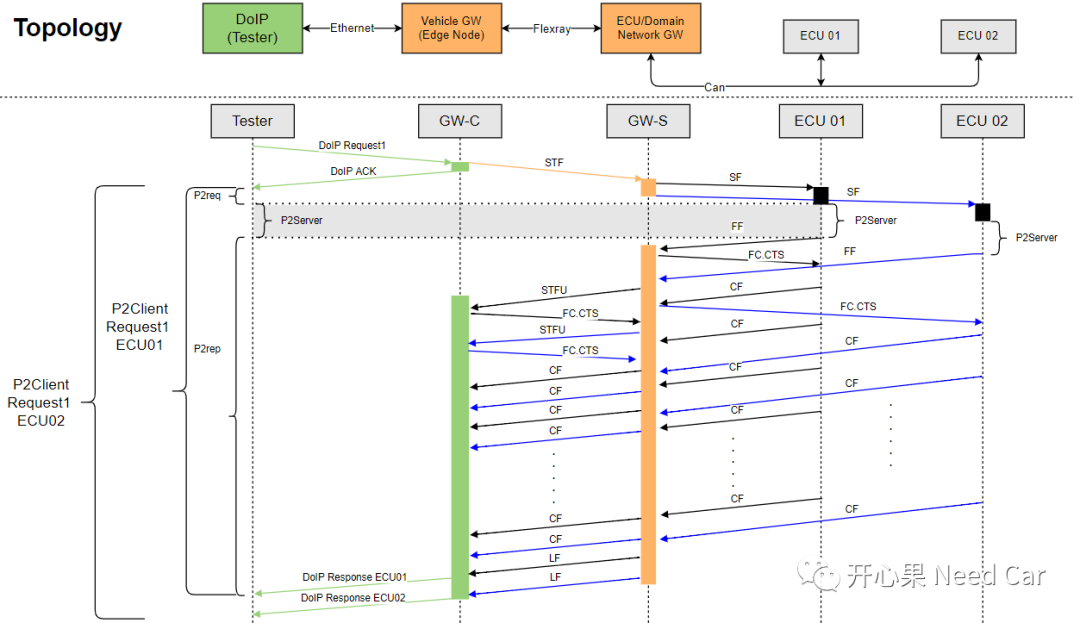
第二:GW處理能力足夠
1、刷寫流程解析
假設 :用功能尋址發送$19 02 08服務,讀取ECU01和ECU02故障信息,回復信息需要 多幀傳輸 。
提示 :基于第一種情況討論
- Tester通過DoIP發送一幀功能尋址診斷請求(Request1 = $19 02 08)給GW-C;
- GW-C會立即應答上位機(因為DoIP診斷請求使用Tcp協議),這相當于Can總線的ACK應答機制,同時將Request1通過Flexray總線路由給GW-S;
- GW-S進一步將Request1由Flexray總線轉成Can總線路由給ECU01和ECU02;
- ECU01和ECU02在各自的P2Server時間內給出響應,即:首幀(FF:Frist Frame)。 受限于GW-S的處理能力 ,GW-S先給ECU01發送FC.CTS(繼續連續幀發送,注意:這里使用物理尋址發送給ECU01),讓ECU01先發送CF(Consecutive Frame )幀,而讓ECU02等待ECU01處理完(給ECU02發送FC.Wait,物理尋址發送流控等待),當GW-S處理完ECU01以后,再給ECU02發送FC.CTS( 物理尋址發送 ),完成ECU02的處理;
- GW-S將Can總線傳來的FF轉換成Flexray的STFU(Start Frame Unacknowledged),之后通過Flexray總線路由給GW-C;
- GW-C接收到GW-S轉發的ECU01 LF(Last Frame)幀以后,響應Tester(DoIP Response ECU01);
- GW-C接收到GW-S轉發的ECU02 LF(Last Frame)幀以后,響應Tester(DoIP Response ECU02)。
2、問題拓展
第一:如上的刷寫流程可以看出,診斷命令Request1經過GW-C、GW-S,到診斷命令被處理(P2Server時間),路由消耗的時間不少,從這個角度考慮,能理解OEM為什么會約束嚴苛的路由時間了吧,就是為了提高刷寫的速率。
第二:功能尋址的診斷請求不僅發送給終端ECU(比如:上述的ECU01和ECU02),GW節點也需要處理該診斷指令(比如:上述的GW-C、GW-S)。
第三:我們常常看到這樣的約束條件:“ 功能尋址的$3E 00/80指令與物理尋址的非$3E 00/80指令同時請求某個ECU時,功能尋址的$3E 00/80指令需要優先處理 ”。為什么呢?畢竟讓節點保持在編程會話更重要。
第四:上述我們看到的是DoIP發送功能尋址給到ECU01和ECU02,這是 同一個指令發送給不同的ECU 。而Parallel Flash中還有一種情況,DoIP分別給ECU01、ECU02發送物理尋址的指令(比如:$10 01),為什么可行?一般診斷中,Ethernet總線的速率是100Mbps,而Can總線速率為500kbps,Ethernet總線速率是Can總線通信速率的200倍,其數據的處理能力足以支撐以太網使用物理尋址給一定量的ECU分別****發送 不同的診斷指令 ,并處理各個ECU的響應數據。
第五:每經過一次GW,指令的路由都會有一定的延遲。
第六:GW處理能力足夠與否,首先需要看主芯片的資源是否夠用,雖然開辟更多的RAM去處理診斷指令可以使得刷寫速率更快(上圖中的第二種情況),但是面對的資源開銷也是相當可觀。尤其當總線轉換時,TP層、PduR模塊都需要開銷資源,而且開銷量都不小。
審核編輯:劉清
-
CAN總線
+關注
關注
145文章
1937瀏覽量
130640 -
ecu
+關注
關注
14文章
881瀏覽量
54409 -
Flash單片機
+關注
關注
0文章
111瀏覽量
9389
發布評論請先 登錄
相關推薦
認識一下這款名叫“CAN總線存儲器”的神器
認識一下NI SWITCH模塊的組成和特點

使用Auto Flash Utility 1.4刷寫外部Flash后,程序讀出來的數據與期望不一致是怎么回事?
請教一下關于asmi_parallel ip核的使用方法
認識一下針對單片機幾個基本概念
認識一下Boost拓撲結構
先來認識一下正激的基本原理
簡單地認識一下D/A和A/D
認識一下甲醛傳感器

認識一下只有driver的驗證平臺





 工商網監
工商網監
評論