") 談一談決策規(guī)劃在量產(chǎn)自動(dòng)駕駛中的挑戰(zhàn)
談一談決策規(guī)劃在量產(chǎn)自動(dòng)駕駛中的挑戰(zhàn)
量產(chǎn)自動(dòng)駕駛簡(jiǎn)介
量產(chǎn)自動(dòng)駕駛目前分為跨越式和漸進(jìn)式兩類。跨越式的是希望一步到位直接做L4級(jí)別的自動(dòng)駕駛,主要有兩個(gè)點(diǎn):
第一個(gè)是需要有一個(gè)特殊的車輛,泛指經(jīng)過(guò)一些做L4的自動(dòng)駕駛公司改裝后的特殊車輛。
第二個(gè)是需要有一個(gè)特殊的場(chǎng)景,指用高精度地圖或一些事先規(guī)劃好的地域逐漸實(shí)現(xiàn)從a點(diǎn)到b點(diǎn)的全自動(dòng)駕駛。漸進(jìn)式是先做輔助智能駕駛系統(tǒng),再迭代實(shí)現(xiàn)L4級(jí)別的自動(dòng)駕駛。
隨著行業(yè)和產(chǎn)業(yè)的不斷發(fā)展和成熟,L2+的輔助駕駛近幾年有了一些不錯(cuò)的成果。L2+量產(chǎn)自動(dòng)駕駛的主流功能有3個(gè):行車輔助、泊車輔助和主動(dòng)安。行車輔助里包括車道保持、撥桿變道、導(dǎo)航輔助駕駛等;泊車輔助里包含車位博入、智能召喚、記憶泊車等;主動(dòng)安全包含防撞輔助、車道輔助、車速輔助等。
輔助的概念實(shí)際上是人機(jī)共駕,即當(dāng)司機(jī)在開(kāi)啟輔助駕駛的時(shí)候,同時(shí)人也會(huì)通過(guò)方向盤和油門對(duì)車輛進(jìn)行控制。
L2+和L4 Planning的差異
做量產(chǎn)自動(dòng)駕駛的思路跟L4不一樣的地方在于L4是怎么樣去取代人類司機(jī)來(lái)開(kāi)車,而量產(chǎn)自動(dòng)駕駛思考的角度是讓人開(kāi)車時(shí)更加的安全和輕松,所以替人開(kāi)車這塊的能力實(shí)際上跟L4是差不多,但量產(chǎn)自動(dòng)駕駛里面會(huì)包括更多的東西。
其中一個(gè)主動(dòng)提示/接管現(xiàn)在的思路是希望結(jié)合比較強(qiáng)大的一個(gè)感知和規(guī)控的能力,把輔助駕駛變成汽車軟件層面的安全帶。
L4級(jí)別的自動(dòng)駕駛是能夠在沒(méi)有接管的各種路況下很好的駕駛車輛,實(shí)際有兩個(gè)很重要的前提:第一個(gè)是需要事先標(biāo)注好的高精度地圖,第二個(gè)是對(duì)于交通參與者以及路面上的一些元素基本上都是一個(gè)非常完美的感知狀態(tài)。但實(shí)際上做L2+的時(shí)候,這兩個(gè)先決條件不一定成立,一旦離開(kāi)了高精度地圖或者沒(méi)有一個(gè)完美感知的時(shí)候,該系統(tǒng)表現(xiàn)出來(lái)的能力還能像L4一樣。
高精度地圖在當(dāng)前的情況下存在著兩個(gè)最大的問(wèn)題:第一個(gè)是制造的成本很太高,導(dǎo)致覆蓋率很低。第二個(gè)是地圖更新做不到實(shí)時(shí)。覆蓋率低的問(wèn)題還涉及到產(chǎn)品本身的問(wèn)題,因?yàn)槭褂米詣?dòng)駕駛能力的一些目標(biāo)客戶并不是都在有高精度地圖覆蓋的一線城市,可能也存在于一些三、四線城市。
同時(shí)這些一線城市并不是所有路段都會(huì)有高精度地圖覆蓋。第二個(gè)是即便該路端覆蓋了高精度地圖,但其本身也不是掃描一次就足夠,因?yàn)檎鎸?shí)道路是每時(shí)每刻都會(huì)發(fā)生變化,因此,后期也需要不停的通過(guò)手工或半自動(dòng)的方式去不斷的更新和維護(hù)這些地圖。另外一個(gè)是感知的不確定性,不確定性主要是來(lái)自于上游的感知,實(shí)際上感知在通過(guò)激光雷達(dá)或視覺(jué)方案給出的時(shí)候,和真值會(huì)有一些偏差以及時(shí)序上的抖動(dòng)。
輔助駕駛里最基本的一個(gè)能力就是車道保持,即駕駛員不用扶著方向盤,車輛也能準(zhǔn)確的行駛在車道中間。在沒(méi)有高精度地圖的情況下,車道線主要依靠視覺(jué)生成。實(shí)際上,這些車道線不可避免的會(huì)存在一個(gè)特性:離車越遠(yuǎn)的車道線,感知誤差會(huì)越大,如圖1所示。還有是感知道的兩幀之間會(huì)存在一定的偏差,導(dǎo)致方向盤會(huì)不斷的抖動(dòng)。
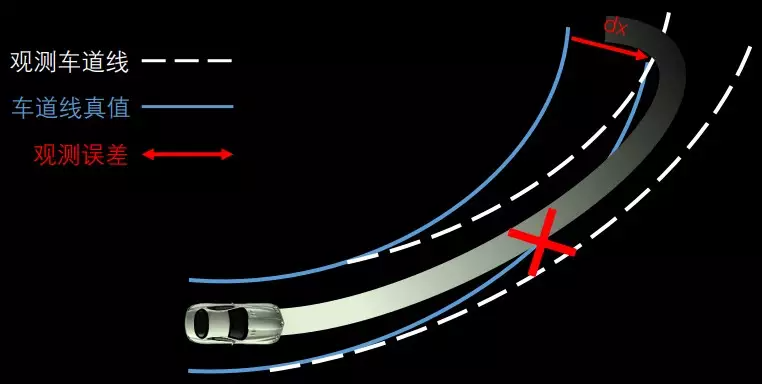
圖1 觀測(cè)車道線與真值誤差
Contingency Planning
量產(chǎn)自動(dòng)駕駛的兩個(gè)基本是安全性和舒適性。但這兩個(gè)指標(biāo)實(shí)際上是相悖的,因此思考的問(wèn)題是:如何在沒(méi)有好的感知情況下,做一個(gè)兼顧安全性和舒適性的自動(dòng)駕駛產(chǎn)品。
做決策規(guī)劃最實(shí)用的兩點(diǎn)是:第一是完備性,即盡可能的擴(kuò)大解空間;第二是最優(yōu)性,即提升解的質(zhì)量。
Contingency Planning(防御性規(guī)劃)能夠?qū)ξ<鼻闆r隨時(shí)做出有效的反應(yīng)。實(shí)際上可以用多模態(tài)的問(wèn)題解決,包括自車的多種可行解以及他車的多種意圖預(yù)測(cè)。舉一個(gè)常見(jiàn)的例子:假設(shè)本車發(fā)現(xiàn)前面停下一輛車,一般會(huì)決策出左繞還是右繞。傳統(tǒng)的做法是假定開(kāi)始選擇左繞,可能更加符合人的預(yù)期,當(dāng)車開(kāi)到新的位置,
上游會(huì)重新給一個(gè)關(guān)于車的新位置估計(jì),這時(shí)再次進(jìn)行判斷繼續(xù)左邊還是右邊,不巧,左邊發(fā)現(xiàn)新的障礙物,決策出需要右繞通行。所以在極端的情況下,最后會(huì)出現(xiàn)搖擺不定,畫龍的問(wèn)題。
目前主流的做法是做一些輸入傾向的提升,這樣只緩解了合法方向的問(wèn)題,并沒(méi)有真正意義上解決問(wèn)題,因?yàn)楫?dāng)前車被檢測(cè)出來(lái)的這一幀,實(shí)際上就已經(jīng)開(kāi)始對(duì)未來(lái)的預(yù)期做了一個(gè)決策。
目前比較習(xí)慣于把軌跡當(dāng)成一個(gè)鏈?zhǔn)侥P瓦M(jìn)行處理,但真正實(shí)用的可能是樹(shù)模型,如圖2所示。
每個(gè)樹(shù)模型分叉的節(jié)點(diǎn)叫branch state,同時(shí)可以在任意的節(jié)點(diǎn)分叉,所以該模型比較的靈活。所以利用該模型來(lái)做剛剛的案例,開(kāi)始選擇在離障礙物有一定距離時(shí)分叉一下,這樣就是由兩段組成:第一段是公用的部分,第二段是分開(kāi)的部分。然后以此來(lái)分叉判別可以保證方向盤不太會(huì)左右晃。即便出現(xiàn)了新的障礙物位置,也可以繼續(xù)用軌跡優(yōu)化。
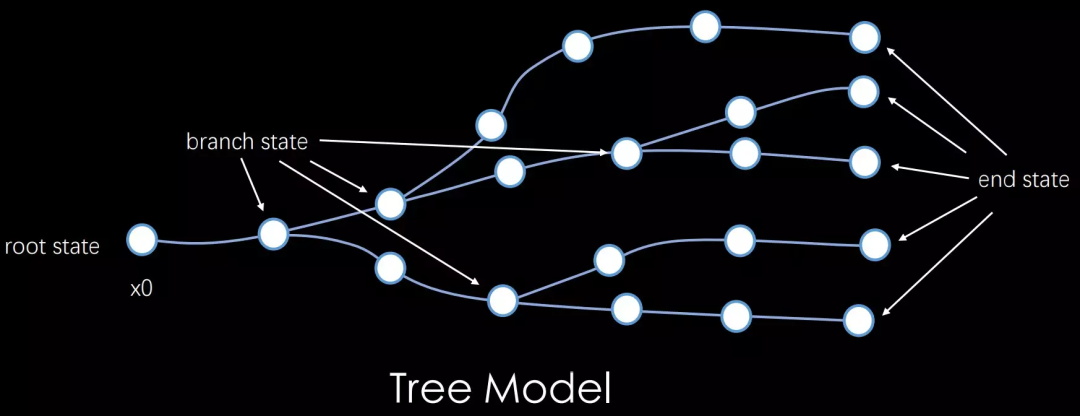
圖 2 樹(shù)模型
還有一個(gè)很在意功能是加塞應(yīng)對(duì),即當(dāng)車輛駕駛時(shí),旁邊開(kāi)過(guò)來(lái)一輛車,是需要繼續(xù)車道保持還是減速/變道處理。傳統(tǒng)方案對(duì)加塞概率進(jìn)行判定,當(dāng)大于閾值的時(shí)候則會(huì)考慮減速/變道處理,這時(shí)車就開(kāi)始減速處理,如果小于閾值,則繼續(xù)車道保持。
但加塞和不加塞的概率各占一半的時(shí)候,很容易出現(xiàn)決策上的跳動(dòng),導(dǎo)致用戶體驗(yàn)不好。
自動(dòng)駕駛方法的加塞處理如圖3所示。如果加塞就會(huì)開(kāi)始減速,然后再提速進(jìn)行跟車,如淺綠色線所示。圖下方是加速度曲線,加速度為0則對(duì)應(yīng)勻速直線行駛,應(yīng)對(duì)加塞時(shí)再減速。
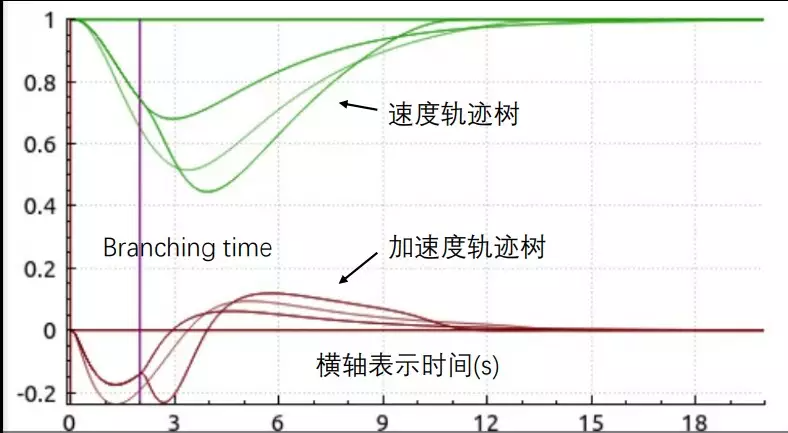
圖3 軌跡樹(shù)的加塞處理
Risk-Aware Planning
Risk-aware的概念是保證自動(dòng)駕駛從a點(diǎn)到b點(diǎn)上整個(gè)的安全性。一般通過(guò)保證每一幀規(guī)劃軌跡是安全的得以實(shí)現(xiàn),實(shí)際上有個(gè)問(wèn)題:保證自動(dòng)駕駛整個(gè)周期的安全性需不需要保證每一幀軌跡的安全性?
通常考慮兩個(gè)點(diǎn):第一,軌跡規(guī)劃不能撞上一些靜態(tài)的障礙物,比如馬路邊、靜止車等。第二與交通參與者的交互有關(guān),比如車輛、行人等交通參與者的未來(lái)行為會(huì)隨著自車的決策規(guī)劃而產(chǎn)生變化。
傳統(tǒng)系統(tǒng)的考慮方式是,當(dāng)前方突然出現(xiàn)一臉車,那會(huì)規(guī)劃出一個(gè)預(yù)測(cè)軌跡,再根據(jù)預(yù)測(cè)軌跡在時(shí)空域規(guī)劃出對(duì)應(yīng)的障礙物,然后規(guī)劃出一個(gè)不會(huì)相撞的軌跡。但當(dāng)舒適性和安全性出現(xiàn)一定沖突的時(shí)候,這樣的規(guī)劃思路比較保守。實(shí)際上要保證整個(gè)自動(dòng)駕駛周期的安全性,單幀軌跡的規(guī)劃性是更高的。
具體來(lái)說(shuō),預(yù)測(cè)往往具備一個(gè)特性:預(yù)測(cè)時(shí)間越往后,置信度越低。也就是在預(yù)測(cè)初期是不可能相撞的(比如2秒內(nèi)),那2秒后是不是可以允許適當(dāng)?shù)慕佑|,同時(shí)讓規(guī)劃出來(lái)軌跡的舒適性和安全性之間達(dá)到平衡,從而保證整個(gè)自動(dòng)駕駛的安全性。
審核編輯 :李倩
-
高精度
+關(guān)注
關(guān)注
1文章
520瀏覽量
25428 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
783文章
13684瀏覽量
166147
原文標(biāo)題:談一談決策規(guī)劃在量產(chǎn)自動(dòng)駕駛中的挑戰(zhàn)
文章出處:【微信號(hào):eng2mot,微信公眾號(hào):汽車ECU開(kāi)發(fā)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
聊聊自動(dòng)駕駛離不開(kāi)的感知硬件
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢(shì)?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
自動(dòng)駕駛識(shí)別技術(shù)有哪些
自動(dòng)駕駛的傳感器技術(shù)介紹
深度學(xué)習(xí)在自動(dòng)駕駛中的關(guān)鍵技術(shù)
毫末智行再獲3億元B2輪融資,加大自動(dòng)駕駛研發(fā)投入
2025量產(chǎn)L4 RoboTaxi,滴滴自動(dòng)駕駛再進(jìn)一步
未來(lái)已來(lái),多傳感器融合感知是自動(dòng)駕駛破局的關(guān)鍵
自動(dòng)駕駛發(fā)展問(wèn)題及解決方案淺析
VADv2:基于概率性規(guī)劃的端到端自動(dòng)駕駛
自動(dòng)駕駛感知算法提升處理策略





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論