 HSSR-8200小信號固態繼電器
HSSR-8200小信號固態繼電器
介紹
傳統上,信號路徑的隔離控制是由電磁繼電器(EMR)提供的。本應用說明的目的是提出一種替代方案,固態繼電器(SSR),并描述SSR的一些使用方式。一個SSR,顧名思義,是完全由固態器件組成的——在其運行過程中不發生任何機械運動。控制側的LED將電氣輸入轉換為光功率。在接觸側,光功率被轉換回一個電信號,為開關驅動器供電,以為固態開關供電。在某些類型的SSR中,來自被開關的電路的一小部分功率被用于操作固態開關(e。g.晶閘管),但在其他的開關操作的電源完全來自光信號(e。g.HSSR-8200)使觸點完全被動。
ssr和emr的一些相對優點可以在圖1的示意圖比較中看到。在控制方面,電磁輻射呈現的感應載荷可能受到磁干擾或輻射磁干擾;磁場的崩潰,當它被斷電時,可能會產生需要抑制的瞬態電壓。SSR控制只是一個LED,既不受磁干擾,也不引起磁干擾;而在開啟或關閉時的低電壓變化很少需要瞬態抑制。雖然電磁場通常可以通過電壓和電流的極性來供電,但SSR需要在所示方向上的電流。用橋式整流器可以很容易地實現SSR的任意極性操作。
在接觸側,SSR可分為三大類:僅交流、直流和雙向(交流或直流)。雙向類型,如EMR,在關閉時可以在任何一個方向上傳遞電流,并且在打開時可以承受任一極性的電壓。在某些類型的EMR中,單個控制電路可以操作超過一組觸點,這些觸點可以形成a(常開),形成B(通常封閉),形式C(雙擲),或這些選項的任何組合。大多數SSRs提供形式的A接觸,但形式B和形式C也可以制作。此外,在大多數SSRs中,單個控制只操作一組觸點,但通過簡單的電路可以很容易地將SSRs的多功能操作實現,如下圖所示。
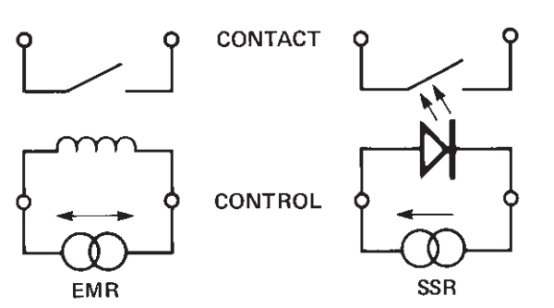
圖1。EMR和SSR的示意圖比較。
ssr和emr之間的重要區別不是圖上的,而是功能上的。在ssr中,沒有機械運動,因此它們比電子病歷有四個明顯的優勢:
1.無接觸反彈,關閉始終保持清潔
2.沖擊、振動或安裝位置沒有問題
3.沒有限制操作次數的磨損機制
4.沒有最低接觸“潤濕”電流
在EMRs,接觸反彈問題可以用汞濕接觸來解決,但這可能會對相對于重力的安裝方向施加限制;ssr 可以在任何位置安裝和操作。在嚴重沖擊和振動的環境中,SSRs提供清潔的操作——除非機械濫用造成物理損壞。ssr的一個特別重要的優勢是無限數量的操作。EMRs通常只對大約10億次操作可靠地運行;如果每秒1000次操作,EMRs只能持續兩周,然后應該更換。
特征總結
SSR的HSSR-8200的一些特性可以根據圖2中的電路圖和圖3中的近似等效電路來描述。首先,注意結構是8針DIP尺寸,但當然只需要四個針。Avago使用四個角銷1、4、5和8,使處理更容易,特別是通過機械自動插入。
接下來,考慮控制側。極性的定義如圖2所示。HSSR-8200通電(觸點閉合)與如果最低至1.0 mA在vf只有略高于1.0V(一些ssr可能有更高的如果和vf所需的東西在某些應用中,可能希望以更高的電流運行,但由于電流隨電壓呈指數變化,這將只需要稍高的電壓。在較高電流下的操作會使觸點快速關閉。并減少r(上)輕微的;它還增加了偏移電壓,VO (OS).斷電SSR(觸點打開)需要較低的電流,但更可靠的保證是使正向電壓小于0.8 V。觸點從打開到關閉的完全開關需要的電壓變化通常小于0.4 V,而且很少大于0。9 V.
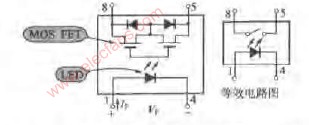
圖2。HSSR-8200電路圖。
在通電條件下,來自LED的光輻射被光電二極管陣列轉換為足夠的電壓和電流來操作開關驅動器(圖。2),也可以驅動兩個fet的門源電極。這里需要注意的是,操作開關的所有電源都來自光電二極管陣列——由開關操作的電路不需要任何電源。接觸側看起來很復雜,但在大多數應用中,可以忽略部分或所有無關的電路元件。因此,值得考慮一下圖3中的等效電路,
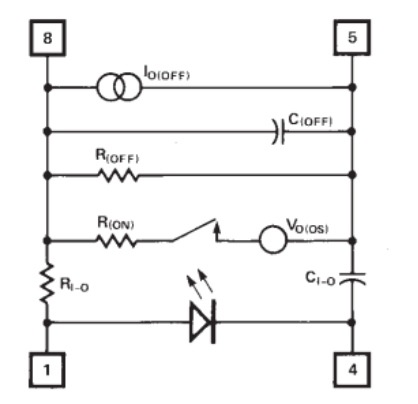
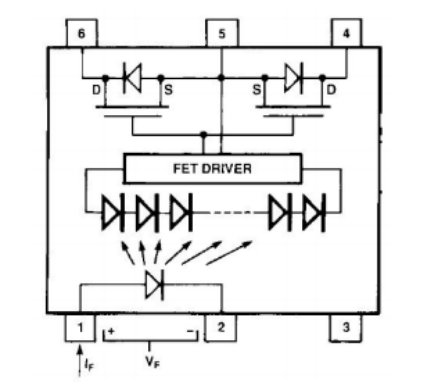
圖3。HSSR-8200的近似等效電路。
并檢查數據表的值,看看它們是否確實可以被忽略。在許多情況下的價值r(上)是如此的低r(關閉)如此高以至于可以被忽略,其他參數可能也是如此。對于HSSR-8200,r(上)是否小于0.00025 MΩ和r(關閉)超過50,000 MΩ;因此,在具有少兆歐阻抗的電路中,它們可以分別被視為短的和開的,誤差只有百萬分之一。對于具有可變阻抗的電路,其比值為r(關閉)向r(上)是重要的,因為它與阻抗比,相對于誤差可能被忽略。
HSSR-8200相對于其他ssr和機械繼電器是通過其高運行速度,低偏置電壓VO (OS),低偏移電流io(關閉),且失電容值較小。在要切換的信號很低的地方,伺服(操作系統)和io從…落下應該考慮。隨著電壓施加到開放觸點上,所產生的電流的一部分io從…落下流入羅從…落下,部分是接觸電路中兩個二極管中的任何一個的反向偏置。當LED打開,開關關閉時,開關的大小伺服(操作系統)最初上升,然后隨著來自LED的熱量通過接觸電路擴散,并在很大程度上平衡熱電偶電壓。的數據表的值VO (OS)在峰值,發生在控制LED通電后幾秒鐘,極性是一致的。
盡管c(關閉)是非常小的,在1000赫茲的電抗嗎c(關閉)低于100 MΩ;因此,要切換具有頻率甚至低于音頻范圍的信號,可能需要采用特殊的技術來處理c(關閉).這種技術可能就像降低電路阻抗一樣簡單,但也可能需要A型和B型開關的串聯分流組合,或應用中和作用。
另一個考慮因素是SSR觸點可以使用的電路電流的范圍。在低端,有漏電流,io(關閉).在高端,電流可能只受到最大額定值的限制io(上),(HSSR-8200為40mA),也可能受到線性度的限制r(上).請注意,在圖2中,接觸由兩個反串聯的fet組成,以提供雙向對稱。在每個場效應晶體管上都有一個源-漏極二極管。 因為每個場效應晶體管的一個通道電阻近似等于一半r(上),當接觸電流上升到通過觸點的電壓降約為兩個二極管下降的水平時,該二極管開始打開。在這個水平以上,動態電阻的值大約是它在低于這個水平的接觸電流值的一半。
在斷電狀態下,HSSR-8200的開放觸點可以承受高達200 V的任何一種極性的電壓。在某些應用中,這些接觸點可能暴露在有害的高瞬態電壓下。FET漏極可能要求提供外部裝置以保護它們免受這種瞬態的影響。同樣,在通電條件下,在不損壞閉合開關的情況下,允許的電流流量是有限制的。
在控制側和接觸側之間是不可避免的寄生現象日本里-O和CI-O如圖3所示。價值超過100萬兆歐姆的,日本里-O通常可以忽略。CI- O對于相對于接觸電路的大瞬態電壓,通常可以忽略。具有足夠振幅的瞬態可以耦合足夠的電荷通過CI-O造成接觸暫時不正常狀態。然而,正如在數據表中所示,控制-接觸瞬態拒絕的值如此之高,因此極不可能發生這種幅度的共模瞬態。即使不存在較大的瞬態,也可能存在控制電路和接觸電路在其共同點之間有線電壓的情況。在115V,60Hz時,1.0 pF的電容耦合約50 nA的電流,在1 MΩ負載下將產生50 mV r毫秒的“哼”電壓。
應用建議
在這里建議的安排中,只顯示了接觸及其預期的閉合序列。稍后,將詳細描述如何獲得這些序列的細節。信號E1. ..N字在圖4中,它們可能來自于級別太低而不能允許直接處理的來源;也就是說,它們可能需要放大或阻抗轉換。A/D轉換器和放大器是昂貴的,所以多路復用的一個動機是使放大器的成本在多個源之間共享。另一個,也許更重要的考慮是,希望對幾個信號施加完全相同的增益,以便放大水平的比率V1...Vn將與未放大的比例有關,E1. ..EN.
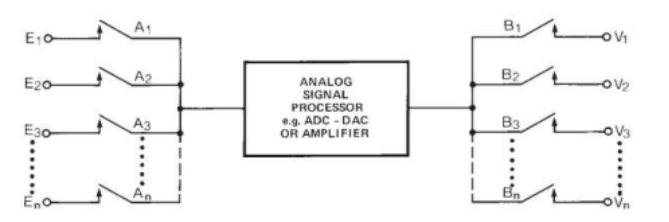
圖4。多路復用和復用。
圖5a顯示了一種利用了封閉觸點的低偏移量和可忽略的非線性的配置。如果不在高或低信號電平上遇到嚴重的錯誤,這種安排可以在40年的范圍內執行反相增益選擇。另一種可能性如圖5b所示;這里的閉合觸點的開啟-電阻甚至比圖5a的排列方式更不重要。如果操作速度不重要,則SSR可以在比通常應用程序所需要的要低得多的控制電流下操作。這在圖6中所示的電池供電報警系統等應用程序中很有用。在這里,報警電路,這將是一個相對沉重的漏極的電池,是斷開的,直到傳感器電路通電的SSR的控制電路。此時,當觸點開始閉合時,控制電路電流增強,并鎖定報警。
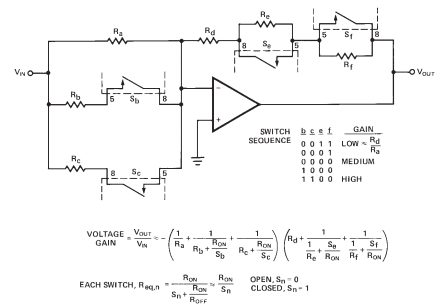
圖5a。反相放大器的增益開關。
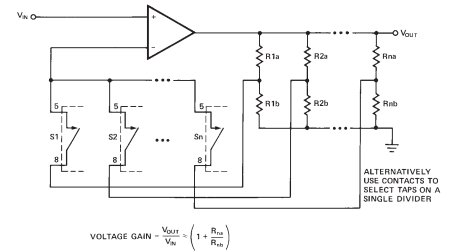
圖5b。非反相放大器的增益開關。
控制驅動電路的建議
運行HSSR-8200控制裝置需要在通電(接通)狀態下的正向電流才能關閉觸點;對于斷電(關閉)狀態,正向電壓必須小于0.8 V。R(ON)為1。0 mA,并且在較高的正向電流下運行并不會大大降低R(ON )。另一方面,增加控制電流增加偏移電壓-幾乎線性。
在控制電流大于1.0 mA的情況下運行,唯一的好處是轉彎開啟時間優于線性減少;關機時間也有輕微的減少。圖7顯示了一個用于獲得所需的接通電流和關閉電壓的簡單電路。所使用的邏輯系列幾乎可以是任何東西.
任何一個TTL邏輯家族,開放收集器或圖騰柱,都將在如圖所示的安排中工作。CMOS也是如此,前提是電流下沉能力足夠。r1設置正向電流的水平,獨立于r2。R2的目的是繞過足夠低的電壓的高泄漏電流,以確保OFF電壓小于0.8 V。在某些正向電壓和正向電流情況下,不需要R2;一些邏輯輸出有內部的上拉電路,能夠滿足關閉電壓的要求,而沒有由R2提供的外部上拉。對于開放集電器TTL輸出,R2總是需要的,因為HSSR-8200實際上可以用幾微安的正向電流運行(盡管在更高的接通電阻下)。在計算該驅動電路和其他驅動電路的電阻值時,正向電壓和正向電流之間關系的有用近似值為正向電壓和正向電流之間關系的有用近似值為:
V = Va +(dV/dT)*(25 - T) + Vb*log (I) V為伏特,T為攝氏度,I為毫安
其中,1.1
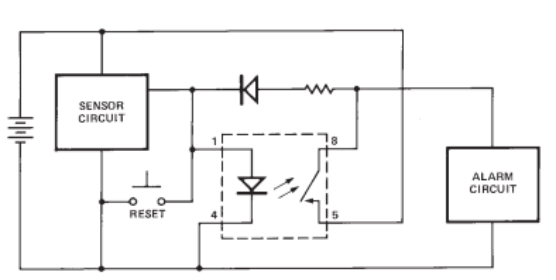
圖6。低控制電流的電池保護器。
圖7中的電路基本上是一種串聯驅動類型,因為有功電流是由一個與LED串聯的設備來切換的。稍后將看到,這種類型的驅動電路在實現其他設計目標方面具有很大的靈活性。它可以與具有主動上拉(圖騰柱)輸出或開放收集器輸出的TTL一起使用。如果開放的集電極TTL可用于驅動控制,那么一個更簡單的替代方案是圖8中的分流開關。它只需要一個電阻器,并且邏輯低電壓不影響接通電流。邏輯低電壓天生滿足關閉電壓要求。
如前所述,接通時間受到正向電流水平的影響。隨著正向電流的增加,接通時間變短。然而,可能不希望以高的穩態正向電流工作,因為這將增加由于從LED控制器轉移到接觸側的熱量而產生的偏移電壓。在需要快速打開但低偏移的情況下,可以使用峰值電路,如圖9所示。當邏輯輸出高,r2保證通過LED的電流很小,使電容器完全放電。然后當邏輯輸出變低時,通過R1和R3的電流激增,直到電容器被充電到R1的電壓,之后穩態電流僅由R1設置。因此,峰值允許快速接通以及低穩態電流(接觸電路中的低偏移)。
關閉觸點需要為開關驅動器電路中的電容進行充電(圖2)。這種電荷是來自光電二極管陣列的時間集成光電流,并轉化為一定數量的電荷,必須通過LED(在200納米庫侖的量級)。該電荷量由峰值電容器的值和在R1上的電壓設定。因此,當需要其他(更高)峰值電流值時,無需改變電容器的值;只需要降低R3的值,并確保邏輯輸出能夠降低更高的電流。
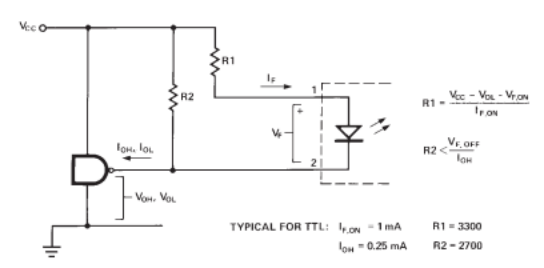
圖7。邏輯驅動控制電路。
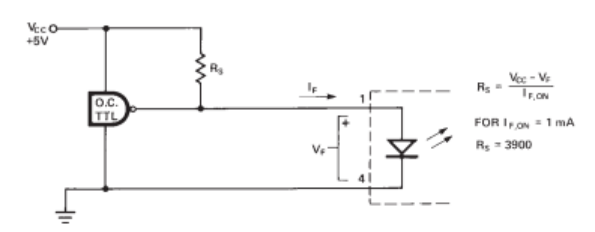
圖8。分流驅動控制。
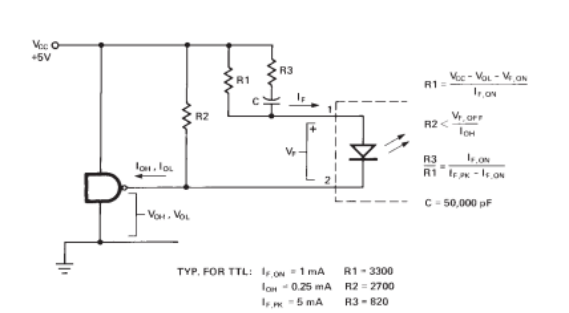
圖9。達到峰值,可縮短打開時間。
圖10顯示了串聯分流驅動器的組合。列驅動器進行串聯切換,行驅動器在分流模式下運行。當啟用輸入高時,選擇所需的行和列(高true),但選定的LED保持關閉,直到啟用變低。這一規定是必要的,以確保“中斷前”操作的接觸。由于關閉時間超過打開時間,必須有一個“死”時間為0.2 ms或更多,以防止重疊接觸閉合。R1和R2的值按照圖7和圖9的電路的描述進行選擇,如果需要,R3,C的峰值可以與每個R1并行添加。
只有當要有選擇地操作大量的開關時,圖10中的矩陣排列才值得考慮。為了從較少的開關中進行選擇,圖11顯示了一個更簡單的電路,其中使用了解碼器/解復用器IC電路。電阻器R1和R2的值的計算方法與圖7和圖9中的電路不相同。這里的原理是選擇一個比值R1/R2,使當74154輸出高時,通過LED的正向電壓小于0.8 V,然后建立這個比值,電阻值足夠小,以便在74154輸出低時允許足夠的正向電流。電阻值的實際選擇最容易的方法是首先在不等式中選擇邊界較大的r1,以提供一個廣泛的r2選擇范圍,以擬合雙側不等式。如果需要在任何一條或所有三條陽極母線上達到峰值,則可以添加R3、C峰值電路,而不影響R1和R2值的選擇。峰值電路可以連接到VCC線上或接地線上。一個重要的問題是74154解碼器的啟用輸入的操作。這兩個值都必須很低,以使輸出(由地址選擇)變低。建議在地址選擇后,在0.2 ms或更多的時間間隔內,至少增加一個啟用輸入,以防止重疊的接觸閉合。
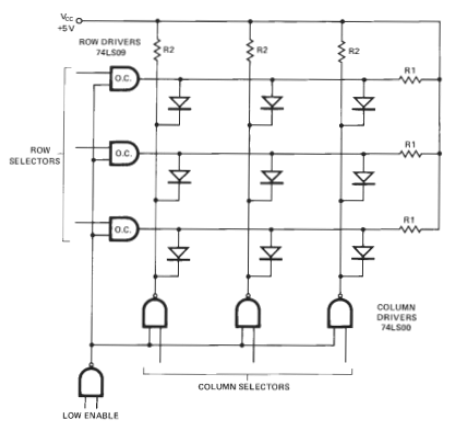
圖10。矩陣驅動控制電路。
過電壓保護
在某些應用中,觸點有可能暴露在破壞性的高壓下。說明了這樣一種情況,其中使用HSSR-8200從幾個輸入中選擇一組輸入,并將該集合呈現給信號處理器。差動輸入(H和L)由處理器驅動的保護裝置(G)屏蔽。當打開時,HSSR-8200的觸點可以承受200 V,正極或負極。所示的故障裝置提供了防止超過200 V造成的損壞的保護。這些器件可以是通用半導體TransZorbsTM或GE/RCAMOVsTM(金屬氧化物可變電阻器)。當它們之間的電壓超過設計水平時,它們會分解并嚴重傳導。如符號所示,擊穿電壓具有任意一個極性,但也有單極性器件。TransZorbs可以承受更多的打擊,但mov有較低的分流電容。這兩種類型都會失敗“短”,因此即使操作失敗,保護也不會失敗。串聯電阻必須足夠大,以將浪涌電流限制為為保護裝置規定的值。
-
固態繼電器
+關注
關注
8文章
366瀏覽量
39085 -
SSR
+關注
關注
0文章
73瀏覽量
17667 -
emr
+關注
關注
0文章
15瀏覽量
14118
發布評論請先 登錄
相關推薦
HSSR-8060/8400低電阻固態繼電器
固態繼電器與普通繼電器的區別






 工商網監
工商網監
評論