") 使用OpticStudio進(jìn)行閃光激光雷達(dá)系統(tǒng)建模(上)
使用OpticStudio進(jìn)行閃光激光雷達(dá)系統(tǒng)建模(上)
在消費(fèi)類電子產(chǎn)品領(lǐng)域,工程師可利用激光雷達(dá)實(shí)現(xiàn)眾多功能,如面部識別和3D映射等。盡管激光雷達(dá)系統(tǒng)的應(yīng)用非常廣泛而且截然不同,但是 “閃光激光雷達(dá)” 解決方案通常都適用于在使用固態(tài)光學(xué)元件的目標(biāo)場景中生成可檢測的點(diǎn)陣列。憑借具有針對小型封裝結(jié)構(gòu)但可獲取三維空間數(shù)據(jù)方面的優(yōu)勢,固態(tài)激光雷達(dá)系統(tǒng)在智能手機(jī)和筆記本電腦等消費(fèi)類電子產(chǎn)品中日益普及。在這個系列的文章中,我們將探討如何使用OpticStudio對此類系統(tǒng)進(jìn)行建模,包括從序列初始設(shè)計(jì)到集成機(jī)械外殼的整個流程。該文章為閃光激光雷達(dá)系統(tǒng)建模系列文章的第一篇。
01 簡介
激光雷達(dá)系統(tǒng)在工業(yè)界中有著多種場景下的應(yīng)用,對應(yīng)于不同種類的激光雷達(dá)系統(tǒng)(比如用于掃描元件或確定視野的系統(tǒng)等),本示例將主要探索如何使用衍射光學(xué)元件來復(fù)制光源陣列在目標(biāo)場景中的投影。成像透鏡系統(tǒng)隨后可觀察到投影的光源陣列,以獲取投射光線的飛行時間信息,進(jìn)而生成投影點(diǎn)的深度信息。
在這篇文章中,我們將介紹用于閃光激光雷達(dá)系統(tǒng)發(fā)射和接收模塊的序列模式系統(tǒng)背景和特征。在后續(xù)的文章中,我們將介紹完整的系統(tǒng)建模和光機(jī)封裝。
02 閃光激光雷達(dá)的應(yīng)用
此類激光雷達(dá)系統(tǒng)的工作原理主要依靠一組放置在光源陣列(如 VCSEL 陣列等)前方的準(zhǔn)直光學(xué)元件,這些準(zhǔn)直透鏡投射光源陣列的光線追跡至包含幾何實(shí)體或者動態(tài)捕捉的場景中。在準(zhǔn)直透鏡后面放置的衍射光學(xué)元件將沿 X 方向、Y 方向和對角線方向創(chuàng)建該 VCSEL 陣列的多個投影(在本例中為 3x3 的網(wǎng)格)。
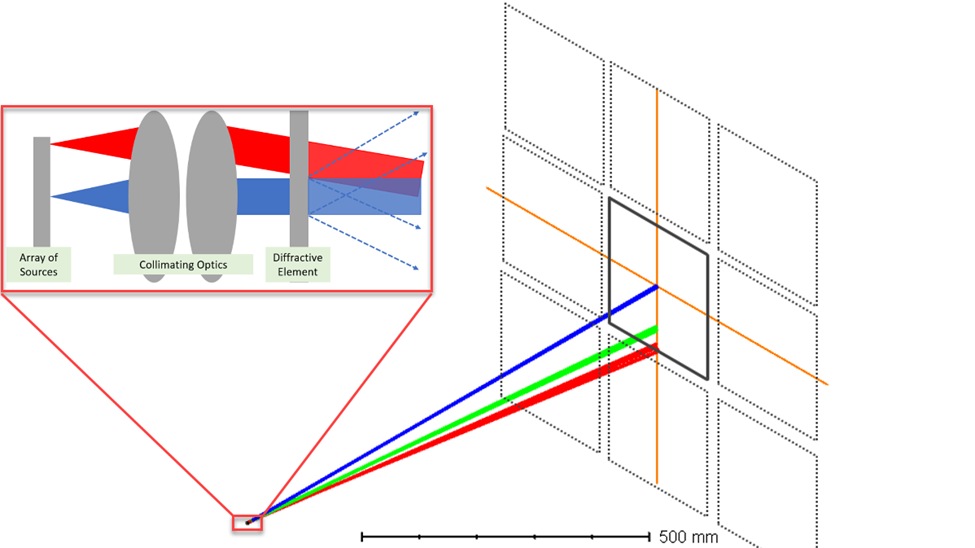
照明模塊將生成一個點(diǎn)陣列,將光線投影到目標(biāo)區(qū)域,隨后成像系統(tǒng)將觀察到照亮的區(qū)域,以檢測投影陣列并獲取場景的深度信息。
設(shè)想一下,我們探索的激光雷達(dá)系統(tǒng)可用于追跡現(xiàn)實(shí)世界的幾何結(jié)構(gòu)及其運(yùn)動情況,以便疊加獲得在計(jì)算機(jī)中生成的圖像。此外,我們還可以將激光雷達(dá)用作 AR 頭戴設(shè)備模塊的一部分,其中用戶可以通過激光雷達(dá)模塊的觀察進(jìn)行手勢識別并與 CGI 進(jìn)行交互。
對于照明的區(qū)域,我們的目標(biāo)區(qū)域是 1 米遠(yuǎn)(略大于一臂長)之外的 480mm x 480mm(大約為 19 英寸 x 19 英寸)的區(qū)域。我們可以這樣想象,如果我們將該激光雷達(dá)系統(tǒng)瞄準(zhǔn)一張桌子或書桌,并想要追跡其表面的幾何結(jié)構(gòu)以及它上面的任何物品時,這樣的覆蓋區(qū)域十分合理。此外,我們還可以假設(shè)用戶將能夠與他們直接視線范圍內(nèi)的虛擬元件進(jìn)行交互。
03 照明系統(tǒng)
首先,我們來定義照明模塊的需求。由于照明區(qū)域可看做光源陣列區(qū)域的投影,因此非常關(guān)鍵的一點(diǎn)是確保我們的準(zhǔn)直光學(xué)元件與所使用的光源能夠相匹配。如果我們假設(shè)光源陣列的有效區(qū)域?yàn)?1.6mm x 1.6mm,那么我們可以確定透鏡所需的焦距為:


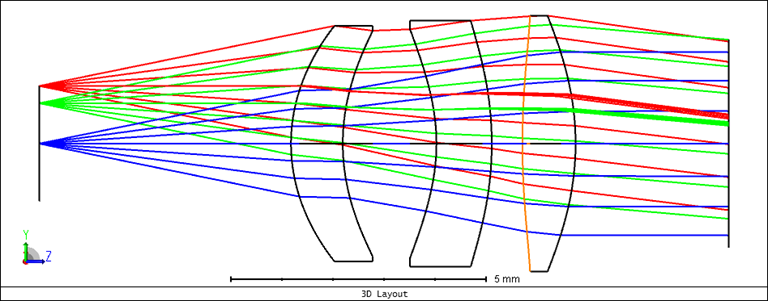
為了在 OpticStudio 中定義模型,可以假設(shè)光源以 0.94 微米為波長的發(fā)射 NA 為 0.2 的光束。透鏡經(jīng)過優(yōu)化可在視場上產(chǎn)生準(zhǔn)直輸出,以確保光源陣列區(qū)域的點(diǎn)能夠在目標(biāo)場景中具有合理的尺寸。鑒于閃光激光雷達(dá)系統(tǒng)的案例基礎(chǔ),為了實(shí)現(xiàn)緊湊的、可批量生產(chǎn)的設(shè)計(jì),選擇小尺寸的塑料材料也至關(guān)重要(對應(yīng)文件提供為 “FlashLidar_Emitter.ZAR”)。
目前,我們可以將每個視場點(diǎn)的發(fā)射都看作為單個二極管的發(fā)射,其光線將被投影到所觀察的場景中。在這個階段,由于光束將在遠(yuǎn)場中被觀察到,并且這個系統(tǒng)主要受幾何像差的影響,因此我們可以將基于幾何光線的結(jié)果作為觀察場景中的光斑性能的良好指標(biāo)。然后,幾何圖像分析(Geometric Image Analysis)工具可用于可視化距離照明模塊大約一米遠(yuǎn)的光斑情況:
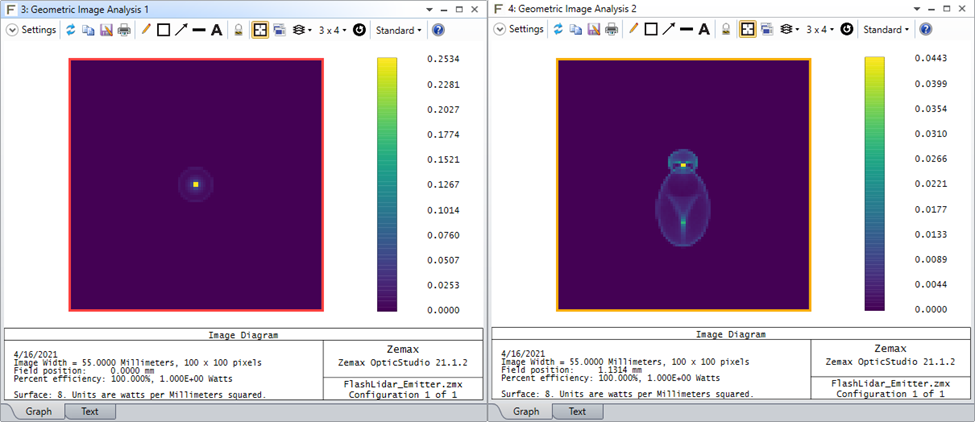
上面的每個幾何圖像分析窗口都顯示了點(diǎn)光源在 55mm x 55mm 的區(qū)域上,從物面到“場景”像面的傳播結(jié)果。非零衍射級次將在被觀察場景的中心階周圍向 X 和 Y 方向產(chǎn)生更多的光斑圖案,從而擴(kuò)展激光雷達(dá)系統(tǒng)的視場。
在這個模型中,我們將使用一對交叉的衍射光柵來創(chuàng)建額外的投影。因此,我們將需要計(jì)算線性光柵圖案所需的空間頻率,以確保一階衍射投影到的區(qū)域不會與零階衍射的相重疊:
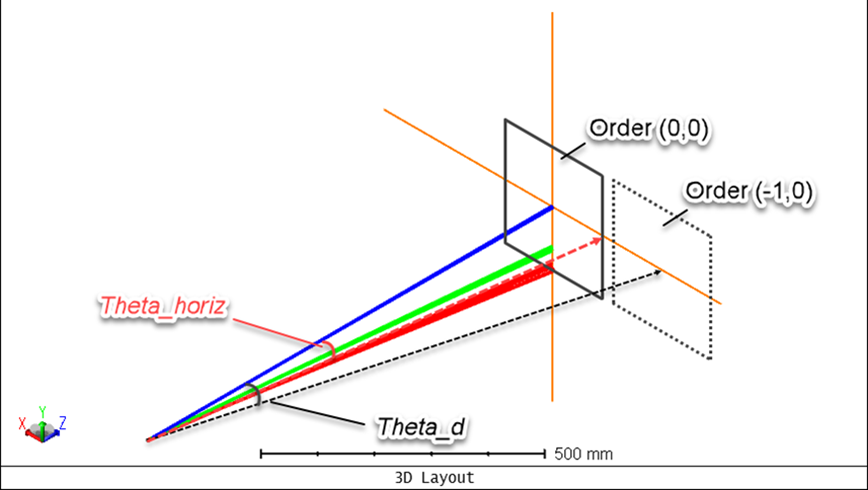
所允許的ZUI小衍射角 θd 是視場水平半視場的兩倍。當(dāng) fc = 10mm,物體高度為 0.8mm 時,零階的半視場 θhoriz, 為4.57?,這可以幫助我們確定光柵刻線之間所需的距離 d(以微米為單位):

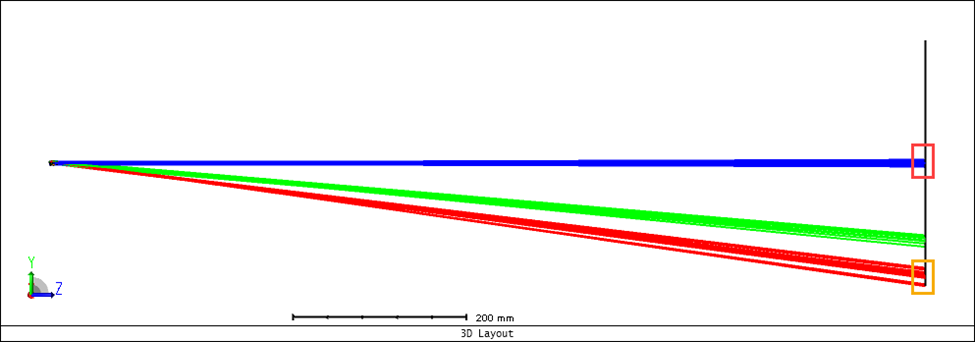
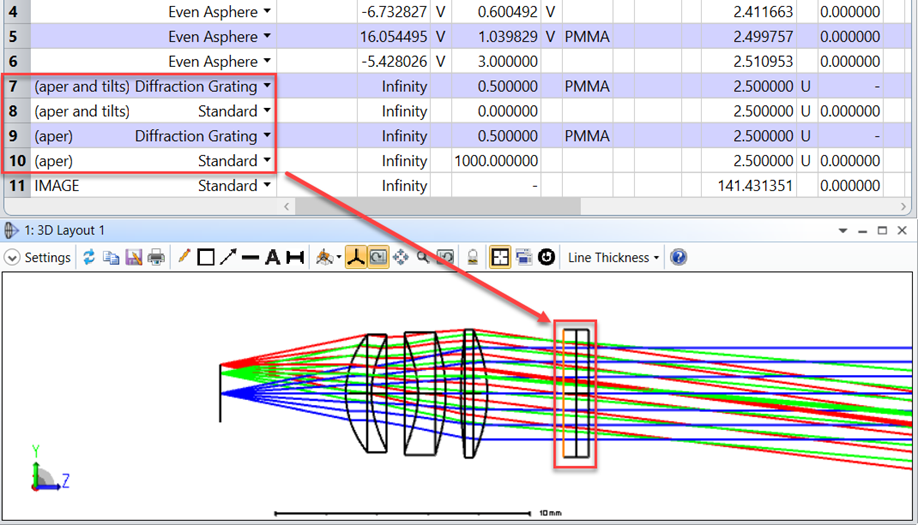
由于 OpticStudio 中的原生衍射光柵表面將光柵的空間頻率作為設(shè)置參數(shù),因此我們可以使用空間頻率 0.17 刻線/微米 來設(shè)置該光柵。我們可以在 OpticStudio 中對這個計(jì)算進(jìn)行驗(yàn)證,通過在序列模式中添加衍射光柵表面,以查看它是否能夠?yàn)椴煌壌沃g提供足夠的距離:
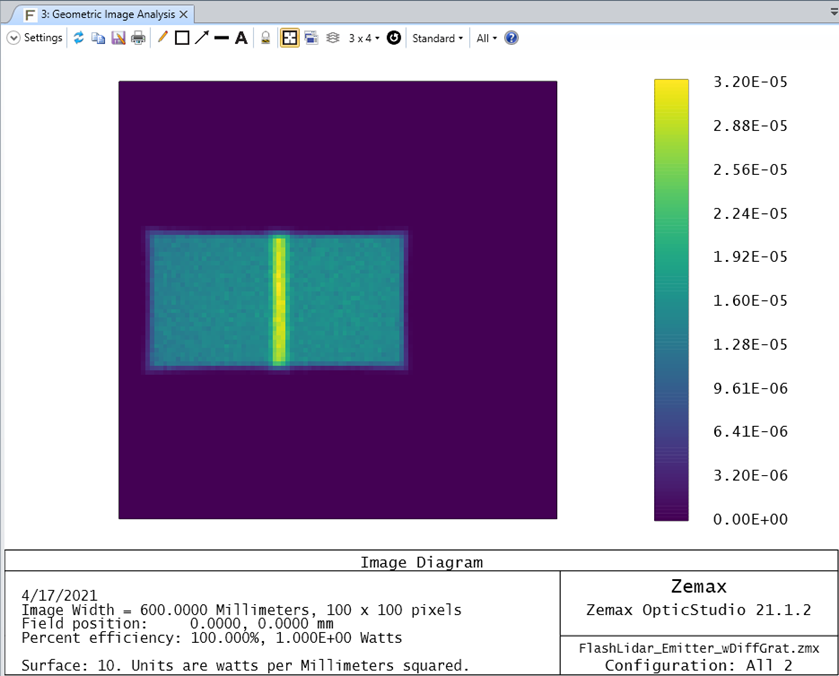
為了檢查投影區(qū)域之間是否存在任何重疊(這可能會導(dǎo)致不同衍射級次之間的光點(diǎn)相互疊加),我們可以結(jié)合使用幾何圖像分析工具以及多重結(jié)構(gòu)編輯器進(jìn)行分析。我們可以定義兩種結(jié)構(gòu),一種顯示中心階,而另一種顯示沿 X 軸的一階。經(jīng)過修改的“填充”版 “SQUARE.IMA”(在所有 OpticStudio 的安裝中提供)可用于演示光源有效區(qū)域在遠(yuǎn)場中的投影是否有任何潛在的重疊。根據(jù)當(dāng)前的空間頻率定義,我們可以看到有一些重疊存在:
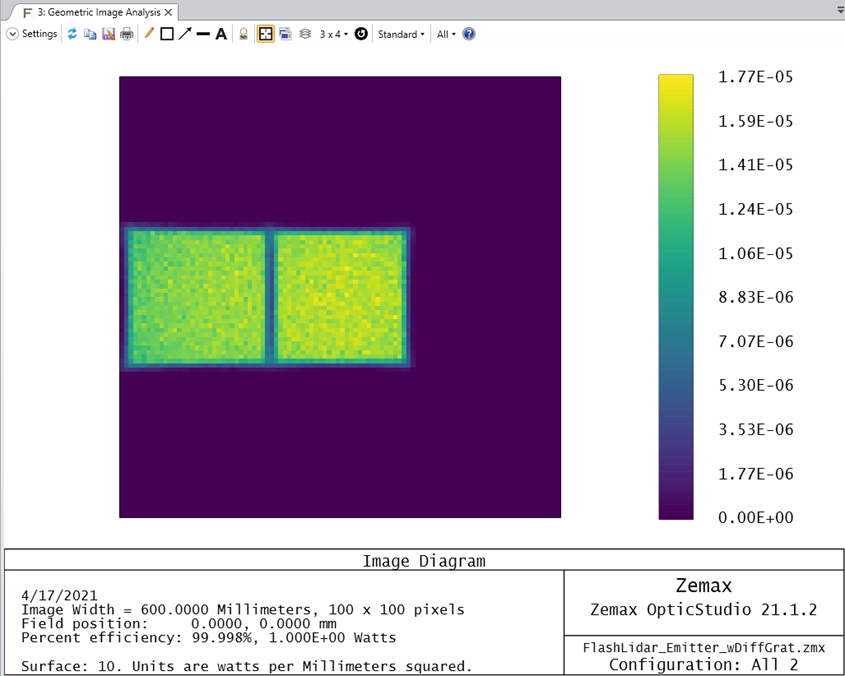
為了解決這個問題,我們可以稍微增加衍射光柵表面的空間頻率,從而增大衍射角。當(dāng)快速編輯到 0.2 刻線/微米時,可以產(chǎn)生更清晰的分離:
在當(dāng)前階段,我們將把實(shí)例文件保存為 “FlashLidar_Emitter_DiffGrat.ZAR”。雖然這是二極管陣列將涵蓋的整體區(qū)域的輸出,但實(shí)際的照明模塊將使用一系列二極管作為點(diǎn)光源,因此照明圖案將成為一系列的點(diǎn)。GIA 檢查的目的是確保當(dāng)我們在非序列模式中更直接地定義光源時,不同衍射級次之間的光點(diǎn)不會重疊。
04 成像系統(tǒng)
為了獲取照明投影中的深度信息,需要一個成像系統(tǒng)對場景進(jìn)行觀察,并通過計(jì)算每個光點(diǎn)的往返飛行時間,將圖像數(shù)據(jù)轉(zhuǎn)換為深度數(shù)據(jù)。根據(jù)之前的計(jì)算,我們知道中心階的半水平和垂直視場大約是 4.57°。由于衍射元件各級次在該中心階周圍產(chǎn)生投影,這將使成像系統(tǒng)所需的視場在水平和垂直半視場上增加到約 9.14°(即約為中心階半視場值的兩倍)。所以,成像系統(tǒng)所需的半視場在水平和垂直方向上為 13.71°,或在對角線方向上約為 19.39°:
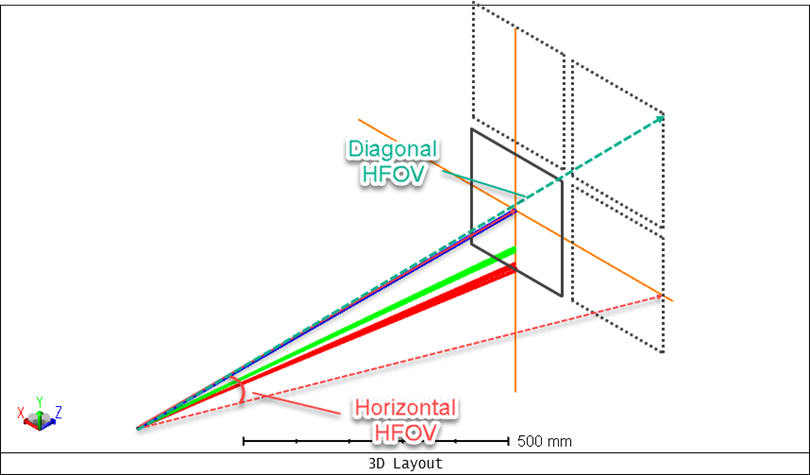
因此,成像模塊需要約為 20°的ZUI小視場。同樣地,由于激光雷達(dá)系統(tǒng)的用例,使用具有小尺寸塑料元件進(jìn)行緊湊型設(shè)計(jì)至關(guān)重要。透鏡如下圖所示,作為示例文件 “FlashLidar_Receiver.ZAR”:
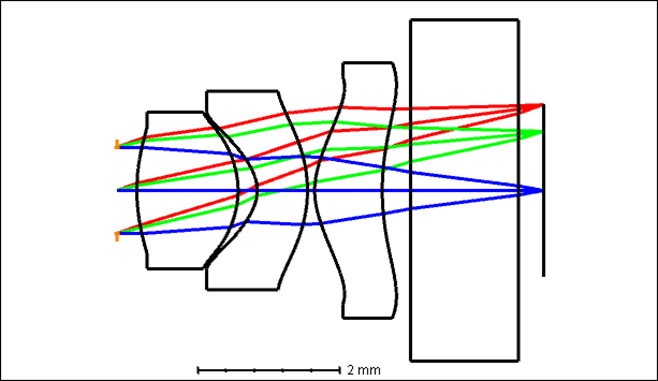
該透鏡的名義設(shè)計(jì)視場大于 20° (約為30°-36°),以確保成像系統(tǒng)的優(yōu)化能夠產(chǎn)生物理上可實(shí)現(xiàn)的元件。例如,這有助于更好地控制非球面元件的邊緣厚度,并確保元件之間有安裝空隙。此外,透鏡的名義設(shè)計(jì)具有無限的物面距離,因?yàn)槠淇赡苄枰喾N工作距離進(jìn)行使用。
由于這種設(shè)計(jì)旨在實(shí)現(xiàn)緊湊的尺寸,成像系統(tǒng)必須平衡該標(biāo)準(zhǔn)與它對視場相關(guān)像差的影響,如畸變和場曲。該設(shè)計(jì)采用了類似于 Cooke 三片式透鏡的結(jié)構(gòu),即在兩個低折射率的正透鏡之間有一個高折射率的負(fù)透鏡。所有元件上都具有非球面系數(shù),允許通過第一個透鏡校正球差,而第三個透鏡可作為場鏡,以改善畸變和場曲的性能。此外,模型中最后還包含一個平板玻璃,該平板玻璃可作為覆蓋接收器模塊圖像傳感器的蓋板。
為了確保成像系統(tǒng)的性能符合我們的需求,我們可以查看 100 lp/mm 時的 FFT MTF 圖:
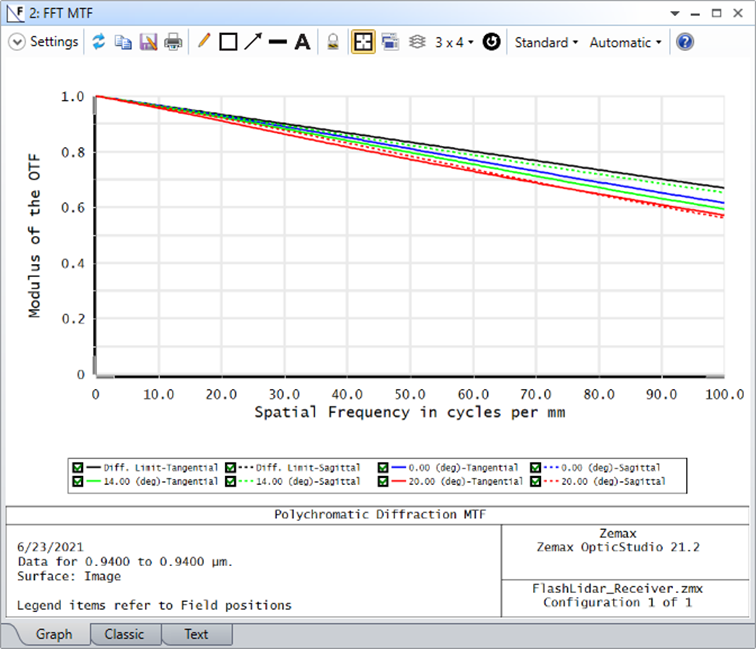
我們可以在 MTF 中觀察到系統(tǒng)接近衍射極限的光學(xué)性能。為了檢查,我們可以通過該系統(tǒng)計(jì)算成像到探測器上的光斑尺寸,以檢查圖像質(zhì)量。我們將轉(zhuǎn)到序列發(fā)射器模塊,并查看“ 場景像面” 上由點(diǎn)列圖確定的光斑尺寸:
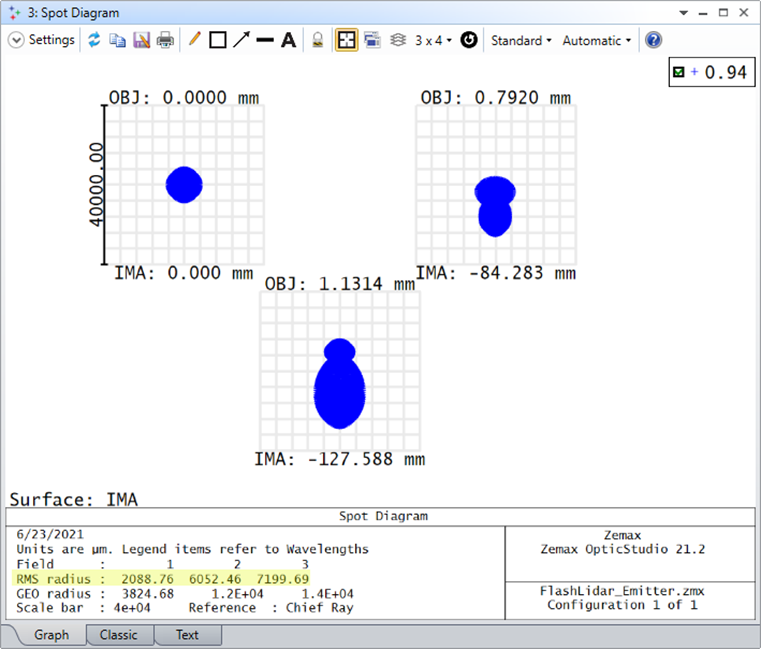
假設(shè)觀察到的ZUI小光斑對應(yīng)從光源陣列發(fā)射出來ZUI中心點(diǎn)光源的結(jié)果。因此,我們可以將中心視場點(diǎn)的 RMS 半徑設(shè)置為 2.089 毫米,并得到探測器上成像的光斑的ZUI終尺寸:


該透鏡成像的光斑空間頻率約為 72 lp/mm,其軸上 MTF 為 72.2%,我們將其作為檢測該光斑成像質(zhì)量是否充分的對比度參數(shù)。
05 結(jié)論
在這篇文章中,我們介紹了閃光激光雷達(dá)系統(tǒng)如何運(yùn)行的背景,并將系統(tǒng)的兩個組成部分通過序列模式系統(tǒng)進(jìn)行建模。在為激光雷達(dá)發(fā)射器的衍射元件進(jìn)行建模時,我們采用了一階方法,以生成不同的投影級次,并評估和避免光源投影中存在任何潛在的重疊。此外,我們還討論并驗(yàn)證了成像模塊是否具有我們所需的充足性能。
審核編輯:湯梓紅
-
建模
+關(guān)注
關(guān)注
1文章
299瀏覽量
60733 -
Studio
+關(guān)注
關(guān)注
2文章
189瀏覽量
28634 -
激光雷達(dá)
+關(guān)注
關(guān)注
967文章
3938瀏覽量
189593
原文標(biāo)題:使用OpticStudio進(jìn)行閃光激光雷達(dá)系統(tǒng)建模(上)
文章出處:【微信號:光電資訊,微信公眾號:光電資訊】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論