 高速CAN總線物理層對于線束的要求
高速CAN總線物理層對于線束的要求
目前車輛的功能越來越多,包括駕駛輔助功能:如360度全景環視、自動泊車、車道偏離預警、車道保持、ACC(自適應巡航)、前碰撞預警、倒車側向警告、盲點輔助等;舒適性功能:如空氣懸架、座椅后視鏡調節記憶等,這些功能的實現都是依靠增加相應的控制器來實現,另外目前的控制器設計基本都要考慮功能安全,其控制策略更加完善,同時也更加復雜,相應控制器之間的信號交互的數量也是極具增加,這些數量巨大的信號必須借助于數據傳輸總線如CAN、CANFD、MOST、FlexRay以及目前逐步開始使用的Ethernet,本文就以目前使用最普遍的高速CAN總線,簡單介紹下CAN2.0協議及對線束的要求。
1、什么是CAN?
CAN(Controller Area Network)控制器局域網,是BOSCH為了解決車輛增加的信號傳輸首先提出,也是ISO國際標準化的串行通信協議。
CAN的特點:
①多主控制:及廣播式,在總線空閑時,所有單元都可以向總線發送報文,通過逐位仲裁來識別報文ID(標識符)的優先級,優先級高的獲得發送權。
②系統的柔軟性:與總線相連的單元沒有類似于“地址”的信息,因此在總線上增加單元時,連接在總線上的其他單元的軟硬件及應用層都不需要改變。
③遠程數據請求:可通過發送“遙控幀”請求其他單元發送數據。
④錯誤檢測功能、錯誤通知功能、錯誤恢復功能:所有單元都可以檢測錯誤,檢測出的錯誤會立即通知其他所有的單元,正在發送消息的單元一旦檢測出錯誤,會強制結束當前的發送,強制結束發送的單元會不斷反復地重新發送直到成功發送為止。
⑤故障封閉:CAN可以判斷出錯誤的類型是總線上暫時的數據錯誤還是持續的數據錯誤(如單元內部故障、驅動器故障、斷線等),由此功能,當總線上發生持續數據錯誤時,可將引起此故障的單元從總線上隔離出去。
⑥連接:總線上連接的單元數量受總線上的時間延遲及電氣負載的限制。降低通信速度,可連接的單元數增加,提高通信速度,可連接的單元數減少。
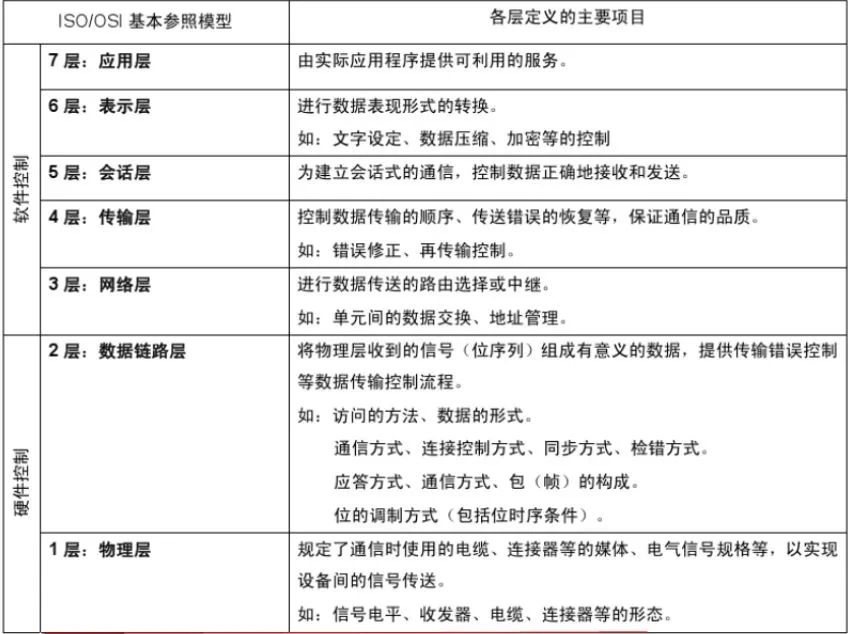
2、OSI基本參照模型
通信協議通常會將相關的通信任務按層歸納,這樣能使總線系統的應用有更大的靈活性。
CAN的硬件和軟件被分為多層:
①應用層:以應用的數據結構來顯示信息。這些數據被傳輸到對象層。
②對象層:作用是管理報文。對象層決定什么時候發送那些報文,同時對接受到的報文進行接收校驗。
③傳輸層:傳輸層向對象層傳輸報文,并將從對象層得到的需要發送的報文變成物理層能夠發送的形式,此外,傳輸層還負責仲裁或錯誤識別及錯誤標記。
④物理層:最底層,由網絡物理元件組成,如導線、電壓。
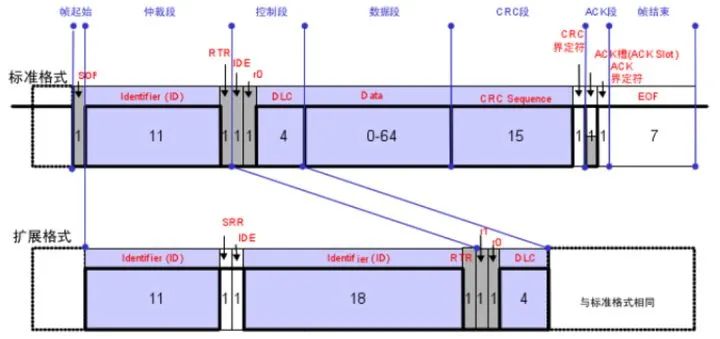
3、報文格式
CAN支持兩種不同的報文格式,分別在CAN2.0A和CAN2.0B中定義,CAN2.0A的標識符有11位,而CAN2.0B的標識符有29位,兩者數據幀格式相同,由幀起始、仲裁域、控制域、數據域、CRC、ACK域,以及幀結束組成。
4、總線傳輸
①總線邏輯狀態及編碼
CAN總線有兩種邏輯狀態,即顯性和隱性,顯性代表二進制位“0”,隱形代表二進制位“1”,收到總線消息后,CAN收發器將信號電平轉換成邏輯狀態,即CAN_H電平與CAN_L電平相減,得到一個差值電平,各種干擾(如電火系統)在兩根導線上的作用相同,相減后得到差值電平可過濾這種共模干擾。
高速CAN在傳輸隱性狀態位時,CAN_H /CAN_L的電平都是2.5V,在傳輸顯性位時,CAN_H上的電平時3.5V,CAN_L上的電平是1.5V。
低速CAN在傳輸隱性狀態位時,CAN_H上的電平時0V,CAN_L上的電平時5V,在傳輸顯性狀態位時,CAN_H上的電平時3.6V,CAN_L上的電平是1.4V。
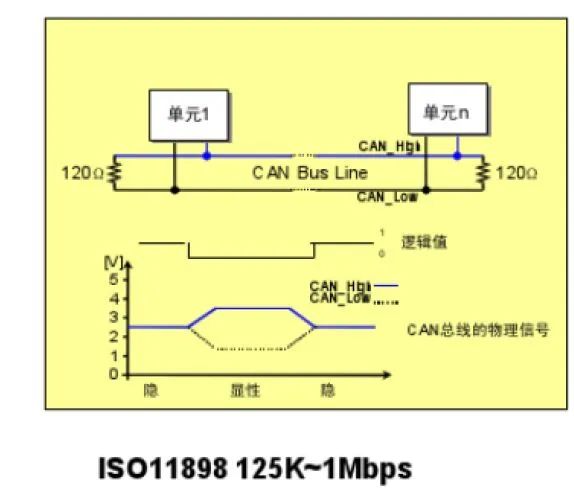
②終端反射消除
開放式的總線在傳輸電子信號時,會產生終端反射而干擾通信,為了消除終端反射,在總線兩端分別加上一個120歐姆的終端電阻。
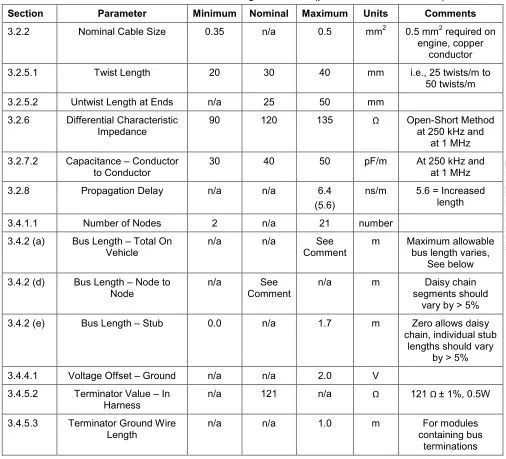
5、CAN對于線束的要求
①特性阻抗的概念
高速CAN總線的波特率500Kbit/S,在高頻下,信號以電磁波的形式傳播過電纜,而描述在高頻情況下,導線對于電磁波的電阻系統及特性阻抗。
電纜的特性阻抗是電纜中傳送的電場強度和磁場強度之比(V/m)/(A/m)=歐姆,特性阻抗的計算公式如下:

R=該導體材質(在直流情況下)單位長度的電阻率,歐姆,
G=絕緣層的導電系數,歐姆
J=虛數,+90度相位角
Л=3.1416
L=單位長度電纜的電感量
C=單位長度電纜的電容量
在高頻下,公式中f的兩項變得很大,這時R和G可以被忽略,公式簡化為:
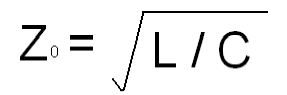
所以在f足夠高的情況下,特性阻抗和頻率沒有關系,特性阻抗等于電感量/電容量的平方根,及感抗、容抗乘積的平方根。
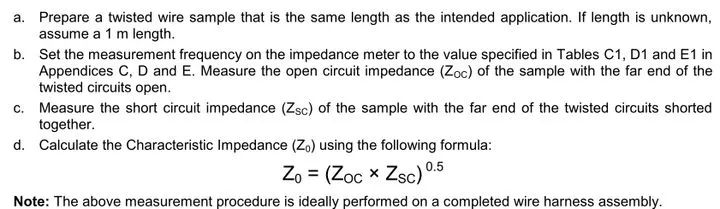
②特性阻抗的測量方法
電纜的特性阻抗描述了電纜在高頻下的工作特性,萬用是用直流電流來測量電阻,所以不能用萬用表來測量電纜的阻抗,可通過專業設備測量一段電纜在遠端開路的情況下的阻抗Zoc,再測量在遠端短路情況下的阻抗Zsc,再用兩者乘積的開放即為導線的特性阻抗。
③阻抗匹配
如果源輸出阻抗,電纜的特性阻抗以及負載輸入阻抗之間不匹配,就存在反射,這些反射波碰撞到信號發生器(源)的時候,它們再次發射和正在發射的正常信號混合,很難區分哪些是原始信號,那些是再次反射波,所以對于高速CAN總線,要求線纜的特性阻抗為120歐姆。
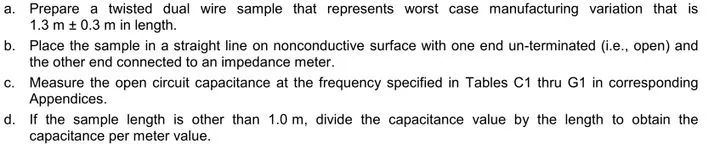
④雙絞線之間的電容
為了保證信號傳輸的完整性,CAN雙絞線必須滿足導線和導線之間的電容的要求,測試方法如下:
⑤傳播延時
為了保證信號傳輸的實時性,信號在電纜上的傳輸時間必須滿足要求,信號延時的測量方法依據EIA-364-103。
總結
除了上述的要求,高速CAN對于線束的要求還有,導線的絕緣層,雙絞線的絞距,pin在插件中的位置,路由的要求(避開天線同軸電纜及容易受影響的信號線,同時避開大電流線)等,CAN線在設計的時候,更多是從信號傳輸理論的角度來考慮,區別于其他供電線及地線。同軸電纜的設計也遵信這樣的設計思路,有機會就同軸電纜寫一下自己的想法。
審核編輯 :李倩
-
CAN
+關注
關注
57文章
2715瀏覽量
463371 -
總線
+關注
關注
10文章
2866瀏覽量
87984 -
線束
+關注
關注
7文章
971瀏覽量
25940
原文標題:高速CAN總線物理層對于線束的要求
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

CAN總線的接口類型
如何將ESP8266-01模塊用作物理層設備?
Can總線的故障類型有哪些
動力can總線系統由哪些部分組成
can總線的常見故障有哪些
裕太微首發國產車載百兆以太網物理層芯片,加碼車載領域
MIPI D-PHY 物理層自動一致性測試
CAN總線pcb走線要求匯總
信號隔離控制器局域網(CAN)物理層收發器ADM3054應用指南






 工商網監
工商網監
評論