 用于自主系統設計的激光雷達
用于自主系統設計的激光雷達
圍繞自主性的問題集中在實現自主性所需的底層技術和進步上。光探測和測距(LIDAR)已成為支持向自主應用轉變的最受討論的技術之一,但仍存在許多問題。范圍大于100米、角分辨率為0.1°的激光雷達系統繼續占據自動駕駛技術頭條。
但是,并非所有自治應用程序都需要此級別的性能。代客泊車輔助和街道清掃等應用就是兩個這樣的例子。有許多深度傳感技術可以實現這些應用,例如無線電探測和測距(雷達)、立體視覺、超聲波檢測和測距以及激光雷達。但是,這些傳感器中的每一個在性能、外形尺寸和成本之間都有獨特的權衡。超聲波設備是最實惠的,但在范圍、分辨率和可靠性方面受到限制。雷達在范圍和可靠性方面有了很大的改進,但它也有角分辨率的限制,而立體視覺如果校準不當,可能會有很大的計算開銷和精度限制。周到的 LIDAR 系統設計有助于彌合這些差距,具有精確的深度傳感、精細的角度分辨率和低復雜度處理,即使在遠距離也是如此。然而,激光雷達系統通常被認為是笨重和昂貴的,事實并非如此。
激光雷達系統設計從識別系統需要檢測的最小物體、該物體的反射率以及該物體的位置開始。這將定義系統的角度分辨率。由此,可以計算出可實現的最小信噪比(SNR),這是檢測物體所需的真/假陽性或陰性檢測標準。
了解感知環境和必要的信息量,以做出適當的設計權衡,可以開發相對于成本和性能的最佳解決方案。例如,考慮一輛以 100 公里/小時(~27 英里/小時)的速度在道路上行駛的自動駕駛汽車,而一輛以 6 公里/小時的速度在行人空間或倉庫中移動的自主機器人。在高速情況下,不僅要考慮以 100 公里/小時行駛的車輛,還要考慮另一輛以相同速度向相反方向行駛的車輛。對于感知系統來說,這相當于一個物體以 200 公里/小時的相對速度接近。對于在最大距離為 200 m 處檢測物體的 LIDAR 傳感器,車輛將在一秒鐘內將它們之間的距離拉近 25%。應該強調的是,車輛的速度(或對物體的非線性關閉速度)、停車距離和執行規避機動所涉及的動力學是每種情況所特有的復雜性。一般來說,可以說高速應用需要更長距離的激光雷達系統。
分辨率是激光雷達系統設計的另一個重要系統特性。精細的角度分辨率使激光雷達系統能夠從單個物體接收多個像素的返回信號。如圖 1 所示,1° 角分辨率轉換為在 200 m 范圍內每側 3.5 m 的像素。這種尺寸的像素比許多需要檢測的對象都要大,這帶來了一些挑戰。首先,空間平均通常用于提高SNR和可檢測性,但由于每個物體只有一個像素,因此不是一種選擇。此外,即使檢測到,也無法預測物體的大小。一塊道路碎片、一只動物、一個交通標志和一輛摩托車通常都小于 3.5 米。相比之下,角分辨率為0.1°的系統像素小10倍,應該在200米距離的平均寬度汽車上測量大約五個相鄰的回波。大多數汽車的尺寸通常比它們的高度寬;因此,該系統可能會將汽車與摩托車區分開來。
與方位角相比,檢測物體是否可以安全驅動需要更精細的仰角分辨率。現在想象一下,自主真空機器人的要求會有多大不同,因為它行進緩慢,需要檢測狹窄但很高的物體,如桌腿。
通過定義行進距離和速度,以及確定目標和后續性能要求,就可以確定LIDAR系統設計的架構(參見圖2中的LIDAR系統示例)。有許多選擇需要做出,例如掃描與閃存,或直接飛行時間(ToF)與波形數字化,但它們的權衡超出了本文的范圍。
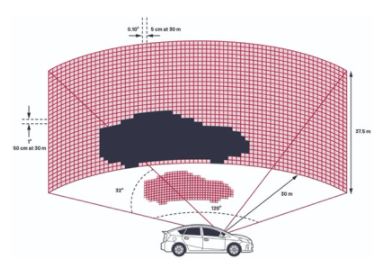
(圖1.具有 32 個垂直通道的 LIDAR 系統以 1° 的角度分辨率水平掃描環境。
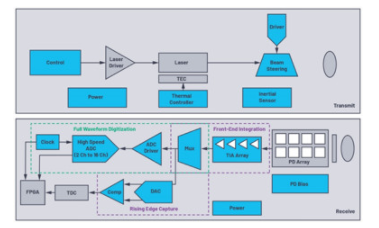
(圖2.激光雷達系統的分立組件。
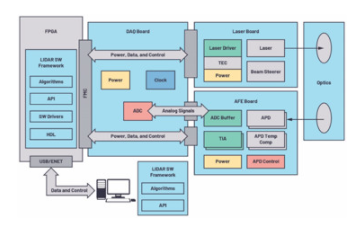
(圖3.ADI公司AD-FMCLIDAR1-EBZ激光雷達開發解決方案系統架構。
范圍或深度精度與ADC采樣速率有關。距離精度使系統能夠準確知道物體的距離,這在需要近距離移動的用例中至關重要,例如停車或倉庫物流。此外,范圍隨時間的變化可用于計算速度,此用例通常需要更好的距離精度。使用直接ToF等簡單閾值算法,在1 ns采樣周期(即使用1 GSPS ADC)下可實現的距離精度為15 cm。計算公式為 c(dt/2),其中 c 是光速,dt 是 ADC 采樣周期。然而,考慮到包括ADC,可以使用更復雜的技術(如插值)來提高范圍精度。據估計,距離精度可以大致提高SNR的平方根。用于處理數據的最高性能算法之一是匹配濾波器,它可以最大化SNR,然后進行插值以產生最佳范圍精度。
AD-FMCLIDAR1-EBZ是一款高性能激光雷達原型設計平臺,是一款905 nm脈沖直接ToF LIDAR開發套件。該系統可實現機器人、無人機、農業和建筑設備的快速原型設計,以及具有 1D 靜態閃存配置的 ADAS/AV。為本參考設計選擇的組件面向長距離脈沖激光雷達應用。該系統采用905 nm激光源設計,由高速雙通道4 AMOSFETADP3634驅動。它還包括一個由LT8331(可編程電源)供電的第一傳感器 16 通道 APD 陣列,用于產生 APD 電源電壓。有多個4通道LTC6561TIA具有低噪聲和高帶寬,還有一個AD90941 GSPS、8位ADC,其每通道功耗最低,為435 mW/通道。將繼續需要增加帶寬和采樣率,這有助于提高整體系統幀速率和范圍精度。同時,最大限度地降低功耗也很重要,因為更少的散熱簡化了散熱/機械設計,并允許減小外形尺寸。
EVAL-ADAL6110-16是另一個有助于激光雷達系統設計的工具,是一款高度可配置的評估系統。它為需要實時 (65 Hz) 物體檢測/跟蹤的應用(如防撞、高度監控和軟著陸)提供了簡化但可配置的 2D Flash LIDAR 深度傳感器。
參考設計中使用的光學器件可實現 37°(方位角)x 5.7°(仰角)的視場 (FOV)。對于以方位角定向的 16 個像素的線性陣列,20 m 處的像素大小與普通成人 0.8 m(方位角)× 2 m(仰角)相當。如前所述,不同的應用可能需要不同的光學配置。如果現有的光學器件不能滿足應用需求,則可以輕松地將印刷電路板從外殼中取出并集成到新的光學配置中。
該評估系統圍繞ADI公司的ADAL6110-16構建,ADAL6110-16是一款低功耗、16通道、集成式LIDAR信號處理器(LSP)。該器件提供用于照亮目標場的時序控制、對接收波形進行采樣的時序以及將捕獲的波形數字化的能力。ADAL6110-16集成了敏感的模擬節點,降低了本底噪聲,使系統能夠捕獲非常低的信號返回,而不是使用具有相似設計參數的分立元件實現相同的信號鏈,其中均方根噪聲可能主導設計。此外,集成信號鏈允許LIDAR系統設計減小尺寸、重量和功耗。
該系統軟件可實現快速的正常運行時間以進行測量并開始使用測距系統。它是完全獨立的,通過USB采用5 V單電源供電,并且還可以通過提供的機器人操作系統(ROS)驅動程序輕松集成到自主系統中。用戶只需為接頭創建一個連接器,即可與機器人或車輛連接,并通過四種可用通信協議之一進行通信:SPI、USB、CAN 或 RS-232。參考設計還可以針對不同的接收器和發射器技術進行修改。
如前所述,可以修改EVAL-ADAL6110-16參考設計的接收器技術,以創建不同的配置,如圖5至圖7所示。EVAL-ADAL6110-16 配備濱松 S8558 16 元件光電二極管陣列。表1中顯示的不同距離處的像素大小基于有效像素尺寸(0.8 mm×2 mm)以及20 mm焦距鏡頭。例如,如果使用單獨的光電二極管(如歐司朗 SFH-2701)重新設計同一電路板,每個光電二極管的有效面積為 0.6 mm × 0.6 mm,則相同范圍內的像素大小將大不相同,因為 FOV 會根據像素大小而變化。
表 1.EVAL-ADAL6110-16中使用的接收器尺寸和光學器件,以及接收器更改為SFH-2701時的潛在像素排列

(圖5.濱松S8558 PIN光電二極管陣列的尺寸。
例如,讓我們回顧一下 S8558,其 16 個像素排列成一條線,每個像素都排成一行。
像素尺寸:2毫米×0.8毫米。
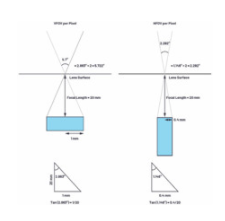
(圖6.使用簡單光學器件對角分辨率的基本計算。
選擇20 mm焦距鏡頭后,可以使用基本三角函數計算每個像素的垂直和水平FOV,如圖6所示。當然,鏡頭選擇可能涉及其他更復雜的考慮因素,例如像差校正和視場曲率。然而,對于像這樣的低分辨率系統,簡單的計算通常就足夠了。
所選的 1 × 16 像素 FOV 可用于自動駕駛汽車和自主地面車輛的物體檢測和防撞等應用,或在倉庫等受限環境中為機器人啟用同步定位和映射 (SLAM)。
一個獨特的應用程序涉及在 4 × 4 網格中配置陣列以檢測系統周圍的對象。這個正在開發中的應用程序將安裝在汽車和房車上,作為車輛周圍的安全氣泡,如果分心的人在公共汽車附近行走,可以警告駕駛員。該系統可以檢測個人行走的方向,并通過停車或用喇叭提醒行人來警告駕駛員采取行動,以防止撞到個人或騎自行車的人。
請記住,并非每個應用都需要 0.1° 角分辨率和 100 m 范圍。花點時間考慮應用對激光雷達系統設計的真正需求,然后明確定義關鍵標準,例如物體大小、反射率、到物體的距離以及自主系統的行進速度。這將為組件選擇提供信息,以實現相對于系統所需功能的最佳性能和成本的平衡設計,最終增加首次成功設計的可能性。
審核編輯:郭婷
-
傳感器
+關注
關注
2548文章
50678瀏覽量
752010 -
激光雷達
+關注
關注
967文章
3939瀏覽量
189598 -
LIDAR
+關注
關注
10文章
323瀏覽量
29358
發布評論請先 登錄
相關推薦
激光雷達的維護與故障排查技巧
如何提升激光雷達數據的精度
TS高速數字化儀在激光雷達系統中的應用
光學雷達和激光雷達的區別是什么
激光雷達點云數據包含哪些信息

晶振在激光雷達系統中的作用有哪些
基于FPGA的激光雷達控制板

硅基片上激光雷達的測距原理

激光雷達的探測技術介紹 機載激光雷達發展歷程

華為詳細解讀激光雷達
華為激光雷達參數怎么設置
什么是激光雷達?激光雷達的構成與分類






 工商網監
工商網監
評論