 KUKA8.2系統下C4機器人虛擬外部軸E1的設置深層分析
KUKA8.2系統下C4機器人虛擬外部軸E1的設置深層分析
C 4 機器人大眾系統版本8.22 所使用配置 虛擬軸軟件SynchroMove(版本:1.2.9)
軟件中的數據庫包括:
壓鉚鉗 數據庫
電伺服焊鉗 數據庫
鉚接鉗 數據庫
氣伺服焊鉗 數據庫
SynchroMove軟件在 機器人D盤中的KUKA_OPT文件夾中。
1.與它相配合還要有相對應的USER用戶程序組建,只要是標準用戶程就行,不能和激光焊的標準組件混用。
2.必須是VW大眾標準體系下的標準機體機器人才能安裝成功,其它機體的機器人是不能安裝此軟件的.
3.必須安裝ProConOS軟PLC

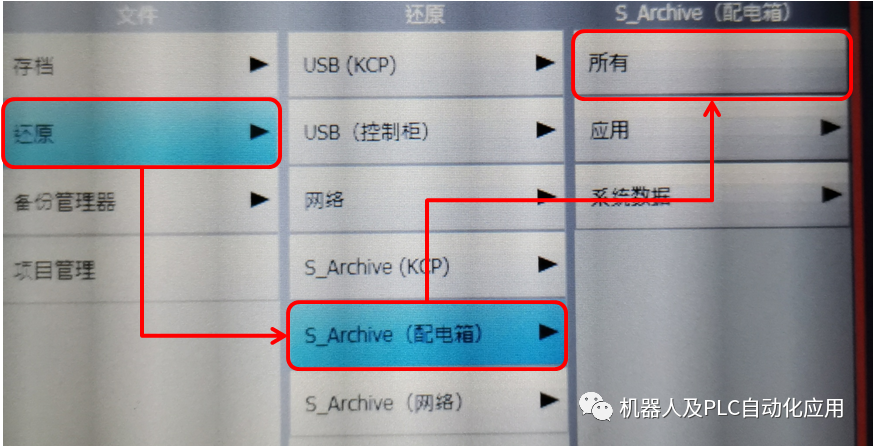
3.軟件安裝
審核編輯:湯梓紅
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
210文章
28199瀏覽量
206514 -
KUKA
+關注
關注
3文章
217瀏覽量
16489
原文標題:KUKA8.2系統下C4機器人虛擬外部軸E1的設置深層分析
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
焊接機器人六個軸分別是什么作用
焊接機器人是現代工業自動化中的重要工具,其靈活性和高效性極大地提升了焊接質量和生產效率。在焊接機器人中,“六軸”是一個常見的結構設計,這六個軸賦予機

【書籍評測活動NO.51】具身智能機器人系統 | 了解AI的下一個浪潮!
的互動形成。
隨著具身智能機器人技術的快速發展,相關人才的需求也在不斷增加,為了幫助大家系統性地總結和分析當前具身智能機器人系統的發展現狀和
發表于 11-11 10:20
焊接機器人拖拽軌跡怎么設置
??自動化技術的不斷進步,焊接機器人是提高生產效率和焊接質量的重要工具。而焊接機器人拖拽軌跡的設置則是確保焊接精準性和一致性的重要環節。今天跟隨創想智控焊縫跟蹤系統小編一起了解焊接

焊接機器人示教模式怎么設置
在現代制造業中,焊接機器人廣泛應用于提高生產效率和焊接質量。而焊接機器人示教模式的正確設置,是確保自動化焊接過程精確執行的重要環節。今天創想智控焊縫跟蹤系統小編帶大家了解焊接

ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
。
ROS系統主要特點有哪些
(1) 提供豐富的機器人算法庫
機器人的各種控制以及通信離不開算法庫的支持,ROS系統提供豐富且功能強大的
發表于 07-09 11:38
Al大模型機器人
金航標kinghelm薩科微slkor總經理宋仕強介紹說,薩科微Al大模型機器人有哪些的優勢?薩科微AI大模型機器人由清華大學畢業的天才少年N博士和王博士團隊開發,與同行相比具有許多優勢:語言
發表于 07-05 08:52
abb機器人home點設置方法
ABB機器人的home點設置是機器人編程和操作中非常重要的一環,它關系到機器人的精度和穩定性。本文將詳細介紹ABB機器人home點
abb機器人的io通信和信號設置過程
引言 ABB機器人作為工業自動化領域的重要設備,其IO通信和信號設置是實現機器人與外部設備進行數據交換和控制的關鍵。本文將詳細介紹ABB機器人

基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
,本設計的實時性遠大于 pc平臺的視覺處理,并完成了沿機器人 X 軸方向的實時視覺跟隨運動.
系統架構
1. ESR6B機器人硬件
發表于 05-29 16:17
六軸焊接機器人的操作流程
靈活的操作性和較高的工作效率,今天跟隨創想智控焊縫跟蹤小編一起了解六軸焊接機器人的操作流程。 一、機器人準備 開機自檢:啟動機器人控制系統,

LabVIEW的六軸工業機器人運動控制系統
LabVIEW開發六軸工業機器人運動控制系統
本項目開發了一個高效的工業機器人控制系統,重點關注于運動學算法和軌跡規劃算法的實現和測試。La
發表于 12-21 20:03
更改KUKA C 4 Windows系統的密碼
或者可以通過 WorkVisual 更改密碼。如果在機器人控制系統上安裝了 KUKA.NonAdmin,則只能通過 WorkVisual 更改該密碼。
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
,以及包管理。它也提供用于獲取、編譯、編寫、和跨計算機運行代碼所需的工具和庫函數。圖1
隨著工業智能化的快速發展,智能機器人設備已成為工業自動化體系的佼佼者,而智能機器人設備核心—ROS系統
發表于 11-30 16:01





 工商網監
工商網監
評論