") 自動往返的小車控制系統(tǒng)的編程實驗
自動往返的小車控制系統(tǒng)的編程實驗
自動往返的小車控制系統(tǒng)的編程實驗
1.實驗目的
(1)進一步熟悉7-200系列可編程序控制器的指令。
(2)用經(jīng)臉設(shè)計法編制簡單的梯形圖程序。
(3)進一步掌握編程軟件的使用方法和調(diào)試程序的方法。
2.實驗內(nèi)容
(1)自動往返的小車控制程序?qū)嶒?/p>
輸人、編譯和下載圖4-7所示的自動往返的小車控制程序后,運行程序。用鈕子開關(guān)模擬各輸人信號,通過觀察Q0.0和Q0.1對應(yīng)的LED,檢查程序的運行情況。
按以下步驟檢查程序是否正確:
1)接通接在I0.5輸人端的開關(guān),用接在I0.0輸人端的開關(guān)模擬右行起動按鈕信號,將關(guān)接通后馬上斷開,現(xiàn)察Q0.0是否ON。
2)用接在I0.4輸人端的鈕子開關(guān)模擬右限位開關(guān)信號,將開關(guān)接通后馬上斷開,觀察Q0.0是否0FF.Q0.1是否ON。
3)用接在I0.3輸人端的鈕子開關(guān)模擬左限位開關(guān)信號,觀察Q0.1是否OFF,Q0.0是否ON。
4)重復第2步和第3步。
5)用接在I0.2輸人端的開關(guān)模擬停止按鈕信號,或用接在I0.5輸人端的開關(guān)模擬熱維電器常閉觸點斷開,觀察輸出是否OFF。
若發(fā)現(xiàn)可編程序控制器的輸人輸出關(guān)系不符合要求,應(yīng)檢查程序,改正錯誤。
(2)較復雜的自動往返小車控制程序?qū)嶒?/p>
在圖4-7所示系統(tǒng)的基礎(chǔ)上,增加下述功能:小車碰到右限位開關(guān)I0.4后停止右行,延時5s后自動左行。小車碰到左隊位開關(guān)I0.3后停止左行,延時3s后自動右行。
輸人、下載、運行和調(diào)試程序,直至滿足要求。注意調(diào)試時限位開關(guān)接通的時間應(yīng)大于定時器延時的時間。
3.預習要求
閱讀實驗指導書,根據(jù)要求設(shè)計出有延時功能的自動往返的小車控制程序的梯形圖,寫出調(diào)試步驟。
4.實驗報告要求
整理出運行調(diào)試好的有延時功能的自動往返的小車控制程序的梯形圖,寫出該程序的調(diào)試步驟和觀察到的結(jié)果。
彩燈控制程序的編程實驗
1.實驗目的
熟悉S7-200系列可編程序控制器的指令,熟悉設(shè)計和調(diào)試程序的方法。
2.實驗內(nèi)容 論目創(chuàng)奧
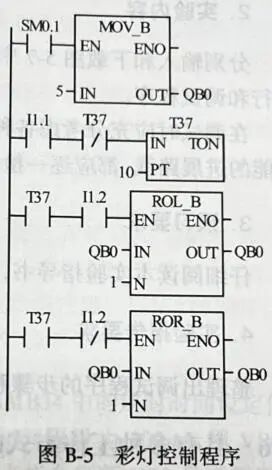
圖B-5中的8位循環(huán)移位彩燈控制程序中,彩燈是否移位用11.1來控制,移位的方向用I1.2來控制,首次掃描時給Q0.0-Q0.7置初值。
輸人、下載和運行彩燈控制程序。通過觀察與Q0.0-Q0.7對應(yīng)的LED,檢查彩燈的工作情況。
按以下步驟檢查程序是否正確:
1)觀察11.1是否可以控制移位,移位寄存器的循環(huán)移位功能是否正常,初值是否與設(shè)定的相符。
2)修改MOV_B指令中彩燈的初值,進人STOP模式后返回RUN模式,觀察彩燈初值是否符合新的設(shè)置。
3)改變T37的PV設(shè)定值,觀察移位的速率是否變化。
4)改變I1.2的狀態(tài),觀察能否改變移位的方向。
5)要求在I1.0的上升沿時用接在I0.0~I0.7的小開關(guān)來改變彩燈的初值,修改程序,使之滿足新的要求,下載后檢查程序的運行情況。
3.預習要求
仔細閱讀本實驗的指導書,復習教材中的有關(guān)內(nèi)容,分析圖B-5的工作原理。
4.實驗報告要求
寫出調(diào)試程序時觀察到的現(xiàn)象。
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6543瀏覽量
110472 -
編程
+關(guān)注
關(guān)注
88文章
3591瀏覽量
93592 -
可編程序控制器
+關(guān)注
關(guān)注
5文章
66瀏覽量
12471
原文標題:用PLC編程實現(xiàn)自動往返的小車控制系統(tǒng)的編程實驗
文章出處:【微信號:玩轉(zhuǎn)PLC工業(yè)機器人,微信公眾號:玩轉(zhuǎn)PLC工業(yè)機器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
校園科研實驗智能溫室大棚環(huán)境控制系統(tǒng)
基于PLC的電機控制系統(tǒng)設(shè)計
前饋控制系統(tǒng)與反饋控制系統(tǒng)的區(qū)別
工業(yè)自動化控制系統(tǒng)有哪些類型
什么是PLC控制系統(tǒng)?它有哪些特點?
工業(yè)自動化控制系統(tǒng)裝置有哪些
自動控制系統(tǒng)的組成環(huán)節(jié)及其作用
工廠自動化控制系統(tǒng)中光纖的作用
PLC控制系統(tǒng)與繼電器控制系統(tǒng)的比較
PLC、DCS、FCS控制系統(tǒng)的區(qū)別

PLC控制小車自動往返的梯形圖設(shè)計

小車自動往返控制PLC梯形圖





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論