 淺析基于Fluent的二自由度圓柱渦激振動數值模擬與應用
淺析基于Fluent的二自由度圓柱渦激振動數值模擬與應用
一、案例描述
本案例源自美國康奈爾大學經典圓柱水槽試驗,在實際的工程應用中,管柱被認為是一個有彈性支撐的剛性結構,結合切片理論可將計算模型簡化至二維,可以看作是一個質量彈簧阻尼系統,如圖中所示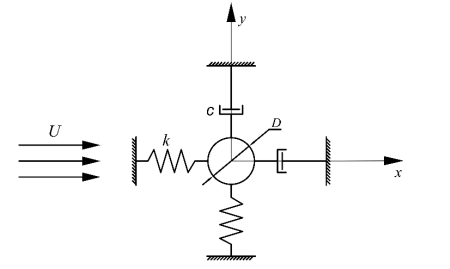
圓柱渦激振動示意圖
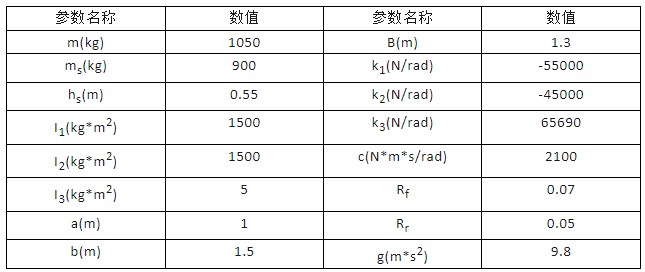
計算參數如下表所示 ?
?
二、采用Designmodeler進行幾何模型建立
Workbench中導入Fluid Flow
右擊Geometry,選擇designmodeler
詳細幾何建模過程不進行描述
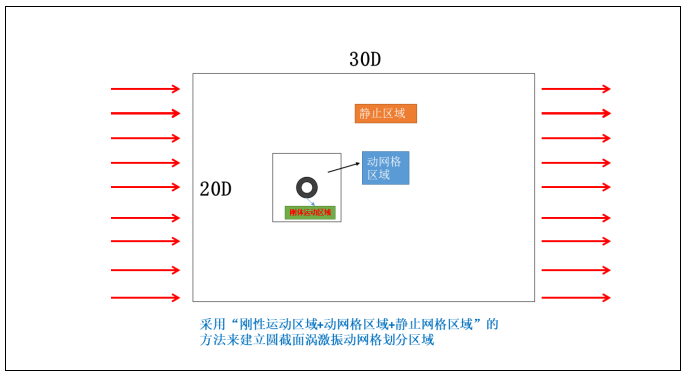
流體計算域模型如圖所示,模型使用的計算域為30D×20D矩形區域。入口邊界距離圓柱中心10D處,出口邊界距離圓柱中心20D處,上部邊界和下部位于距圓柱體中心10D處,并被定義為對稱邊界。
其中圓柱位于入口下游10D處,位于橫流方向的中心線(y=0)。阻塞率為圓柱直徑與流場域寬度的比值,本文阻塞率為0.05,不超過0.05,故滿足要求。采用“剛性運動區域+動網格區域+靜止網格區域”多區域劃分的方法來建立圓截面渦激振動流場區域,整體流場分為外流域部分和內流域部分。
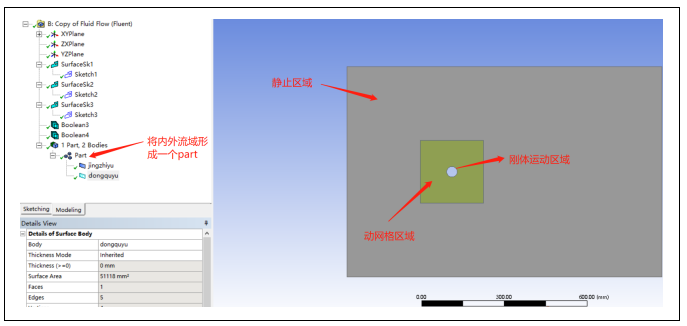
注:為保證流場在內外流域交界地方一致性,選中內外流域,鼠標右擊from a part,可保證后續畫網格時具有網格一致性。
 ?
?
三、采用Meshing進行網格劃分
Workbench中導入Fluid Flow
雙擊Meshing,詳細網格劃分步驟在這里不介紹了
整體流場在進行網格劃分時,采用“剛性運動區域+動網格區域+靜止網格區域”的 方法來建立圓截面渦激振動網格劃分區域,如圖中所示,具體劃分區域如下: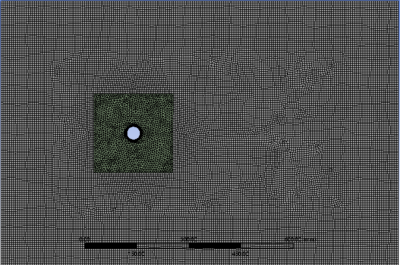 ?
?
(1) 動網格區域采用非結構化三角形網格進行網格劃分,Fluent動態網格模型算法采用Smoothing+Remeshing的方式更新動網格,此區域為變形區,為圓柱的振動提供了一個運動的空間,其網格會因圓柱的運動而進行重新劃分,因此網格的初始質量好但隨著重新劃分可能有所下降,但可通過參數設置使重新劃分后的網格質量盡可能好。
此區域的大小由圓柱的振幅大小決定, 考慮到文獻實驗中的最大振幅為1.5D左右,因此動網格區域尺寸取為6D×6D,留有充足的空間允許圓柱進行大范圍的的振動,能夠很好地滿足數值計算的需要(避免振幅超過容許空間從而擠壓外邊界形成負網格);
(2)剛性運動區域主要包括圓柱流固耦合邊界與邊界層區域,圓柱近壁面邊界層網格采用膨脹層網格處理,使在主要流速下預估的Y+=1,邊界層第一層高度可按經驗公式計算,近壁面劃分15層四邊形結構化邊界層網格,網格增加率設置為1.2,向外過渡至與動網格的交界處。
邊界層區域網格尺寸較小、網格劃分質量較好并具有與圓截面相同的運動速度,因此將隨著圓截面的振動而振動,由此來保證圓截面附近的網格一直處于初始的高質量狀態從而確保各時間步都具有足夠的計算精度。
(3) 靜止網格區域采用四邊形結構化網格,整體網格尺寸網格尺寸保持不變,用以為模擬尾流中的渦街提供更好的計算精度。
四、Fluent 基本設置
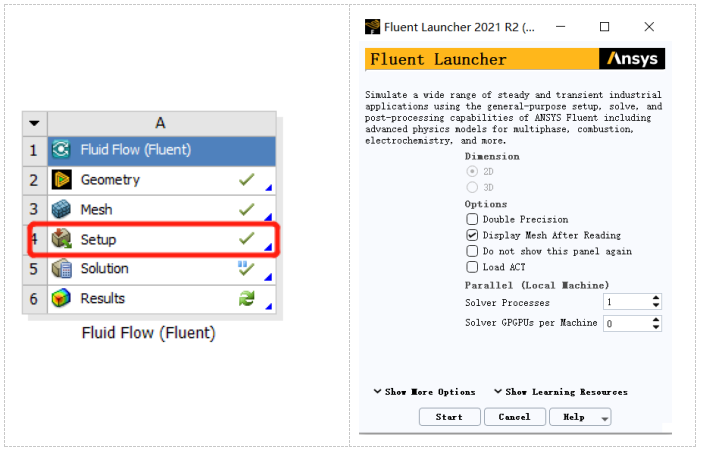
步驟一:啟動fluent
Workbench中導入Fluid Flow
雙擊Setup,不考慮運行計算的話,默認即可
步驟二:General 設置
點擊左側模型樹節點 General ,出現 General 面板,如圖所示。
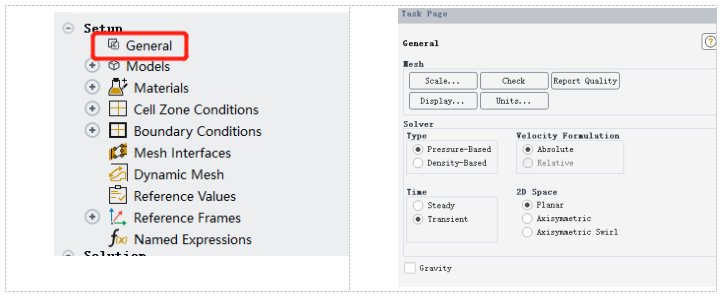
對面板進行參數設置 Scale…
點擊scale…
將單位修改為與幾何建模時尺寸單位保持一致
點擊close
Check
點擊 Check 按鈕,屏幕輸出網格信息如圖所示,確保網格最小體積為正值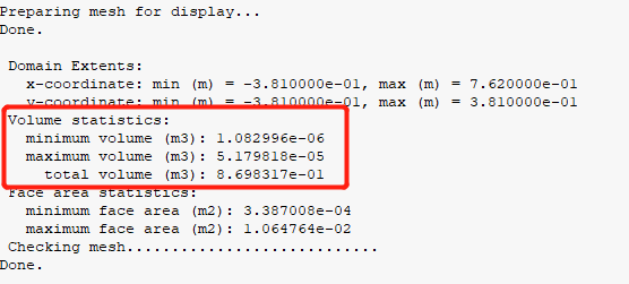
Time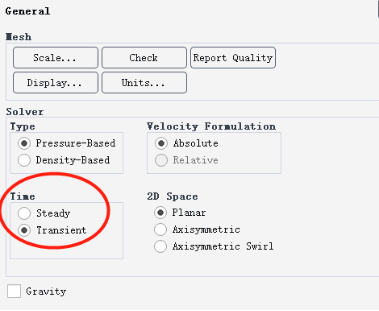
由于渦激振動屬于周期性振動,Time選項設置為transient,進行瞬態研究 其余保持默認即可
步驟三 Models設置
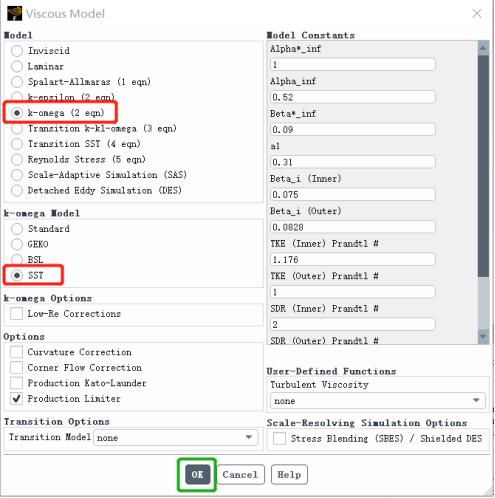
選擇模型樹節點 Models ,在右側 Models 列表項中雙擊,彈出湍流模型設置對話框。設置參數:
選擇 Model 為 k-omega ( 2 eqn )
選擇k-omega Model 為 SST
選擇OK按鈕關閉對話框
其他保持默認即可
步驟四:Materials設置
選擇模型樹Materials,分為流體材料fluid和固體材料solid,雙擊材料空氣air進行設置,彈出材料設置窗口
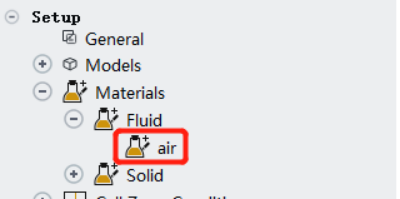
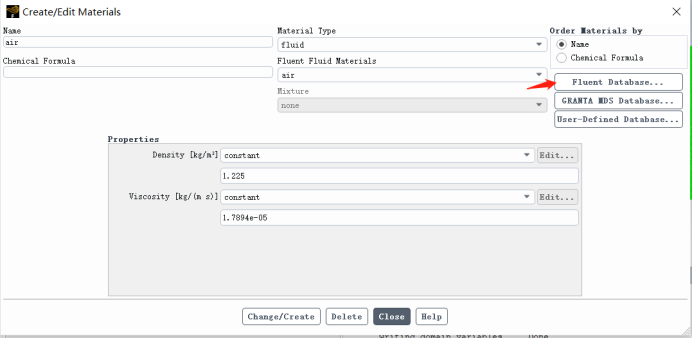
點擊Fluent Datebase…
下拉菜單至最后,找到材料水(water)
點擊Copy
其余選擇默認,點擊close關閉

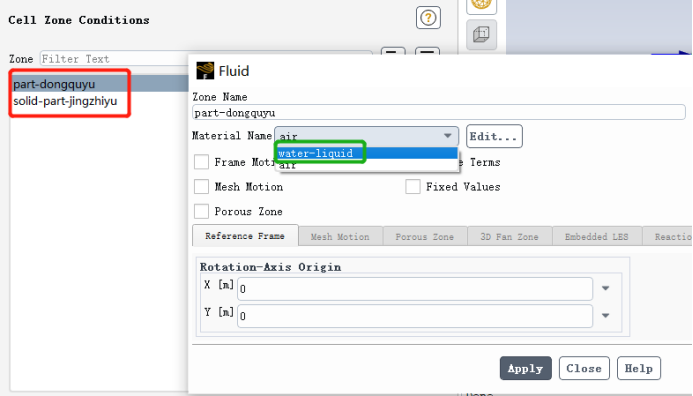
步驟五 Cell Zone Conditions
選擇模型樹Cell Zone Conditions,雙擊彈出區域設置窗口,如圖所示
分別選擇part-dongquyu和solid-part-jignzhiyu,將屬性設置為流體
將material name 選擇為 water-liquid
其余保持默認,點擊close關閉
步驟六:Boundary Conditions
點擊模型樹節點 Boundary Conditions ,參數面板如圖所示。
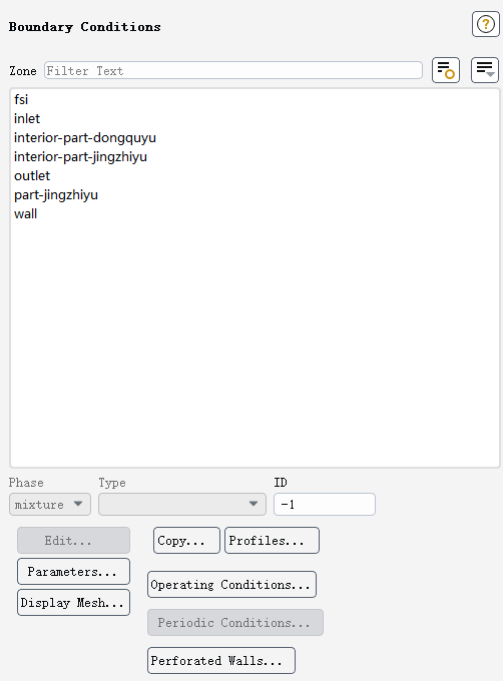
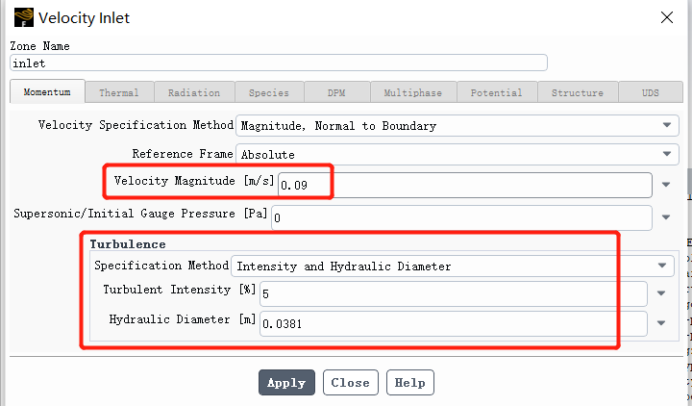
1、Inlet 邊界設置
鼠標雙擊 inlet 列表項。設置參數:
設置 Velocity Magnitude 為 0.09m/s
設置 Specification Method 為 Intensity and Hydraulic Diameter
設置 Turbulent Intensity 為5%
設置Hydraulic Diameter 為 0.0381
選擇OK按鈕關閉對話框
2 、 Outlet 設置
鼠標選中 outlet 項,設置 Type 為 Pressure-outlet,Gauge pressure設置為0,其他參數保持默認。
步驟七 :Dynamic Mesh
點擊模型樹節點 Dynamic Mesh ,參數面板如圖所示。
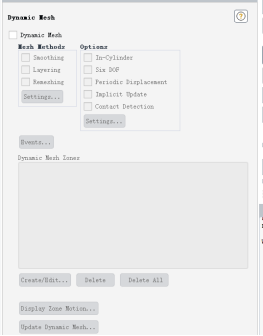
勾選Dynamic Mesh
勾選Smoothing和Remeshing
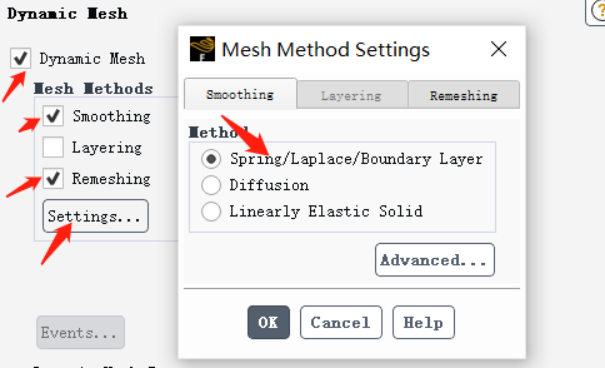
點擊settings…,選擇 spring
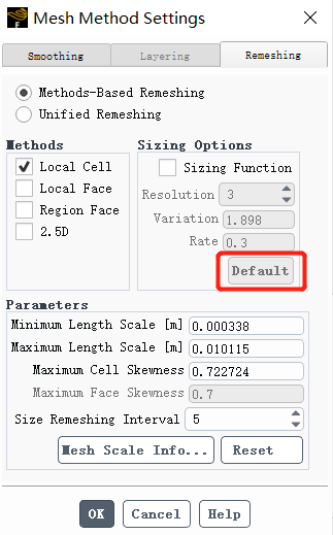
選擇remeshing,點擊default,點擊ok
導入外部UDF文件
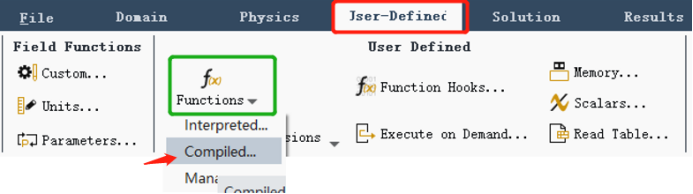
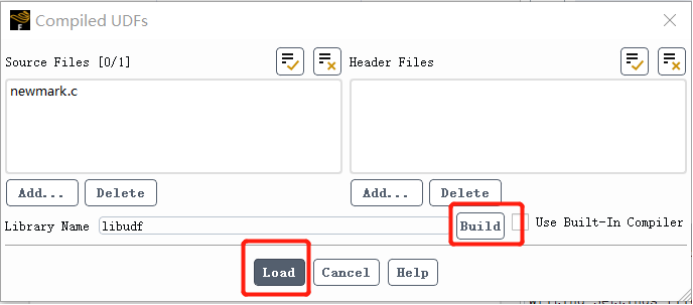
點擊菜單欄User-Defined
選擇需要的UDF文件
點擊Build,點擊加載Load
邊界層網格分離
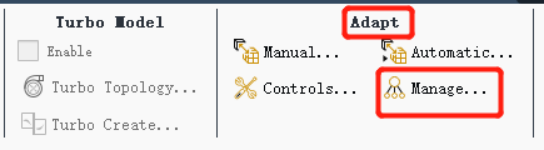
點擊菜單欄Domain
選擇Adapt,點擊Manage…
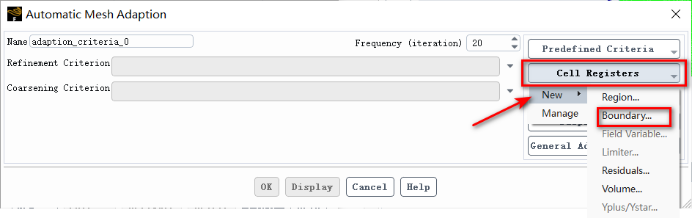
選擇Cell Registers,點擊New
點擊boundary
選擇Boundary zone 中的fsi
設置number of cells 為相應邊界層網格的層數
點擊save/display
點擊close關閉
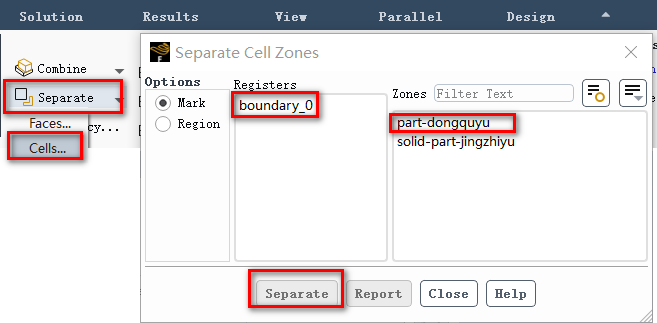
點擊Domain 中的 separate,選擇cell…
選擇boundary_0和part-dongquyu
點擊separate
點擊close關閉
邊界運動或變形的指定
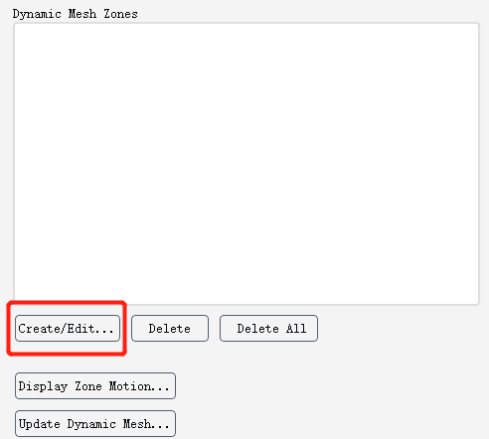

點擊動網格部分的dynamic mesh zones的create
Zone name 選擇為fsi
Type 選擇為剛體運動 Rigid body
UDF選擇導入的fluid::libudf
將分離出的邊界層網格part-dongquyu:013進行相同的操作
其余默認,點擊close關閉
步驟八 Reference Values
選擇模型樹節點 Reference Values,如圖所示
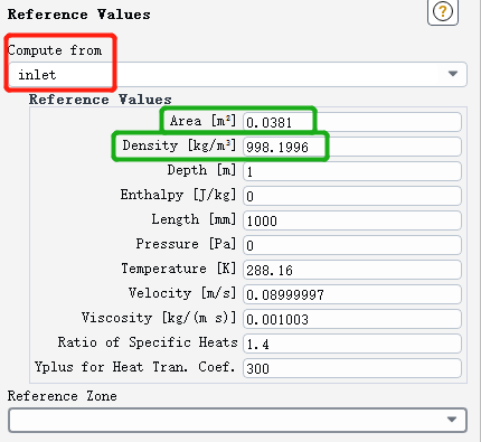
Compute from 選項選擇為 inlet
Area 設置為0.0381
Density設置為998
其余保持默認
步驟九 Solution Methods
此模型保持默認參數
Step 11 :Solution Controls
保持默認參數
步驟十 Monitors
選擇模型樹節點 Monitors,如圖所示,選擇Report Files,鼠標右鍵,點擊edit‘’
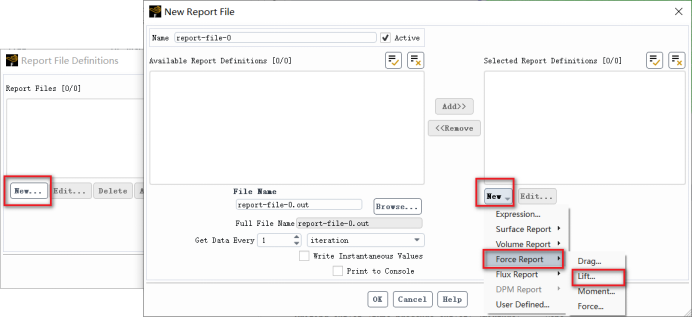
點擊report files 中new…
點擊new report file中的new,選擇force report,點擊lift…
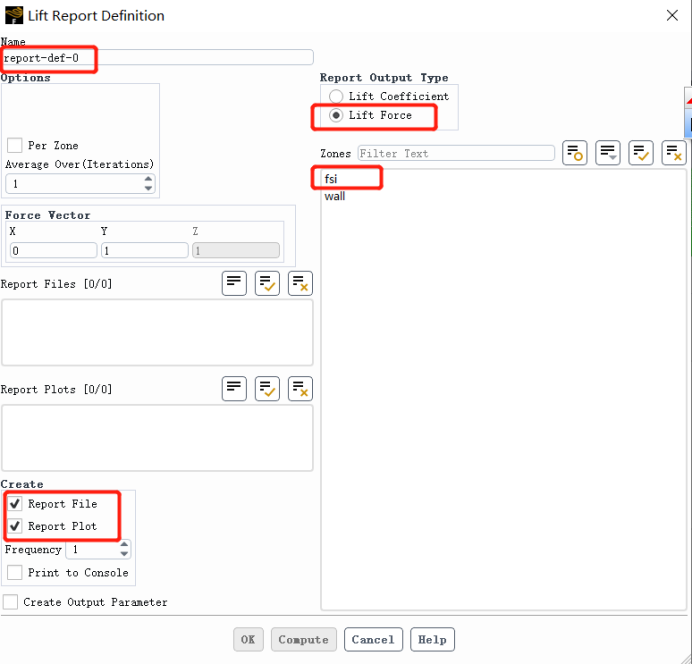
Name 可自己命名名字
點擊lift force,選擇fsi
勾選report file和report plot
點擊OK,關閉窗口即可
步驟十一 Initialization
點擊模型樹中的 initialization,出現如圖所示窗口
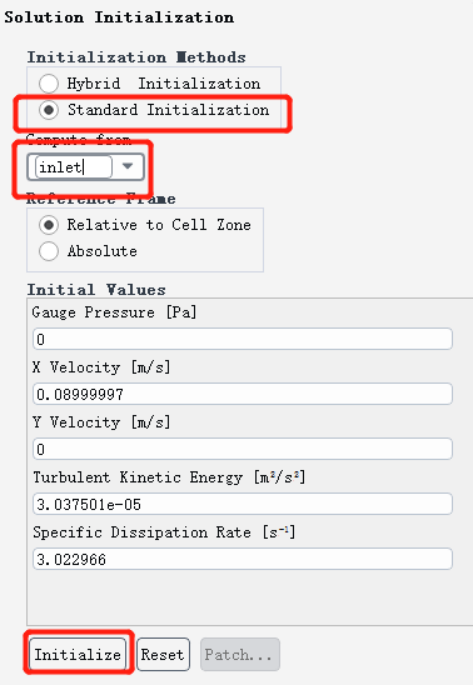
選擇 Standard Initialization
Compute from 選擇 inlet
點擊 initialize
步驟十二 Calculation activities
雙擊 solution animations,如圖所示
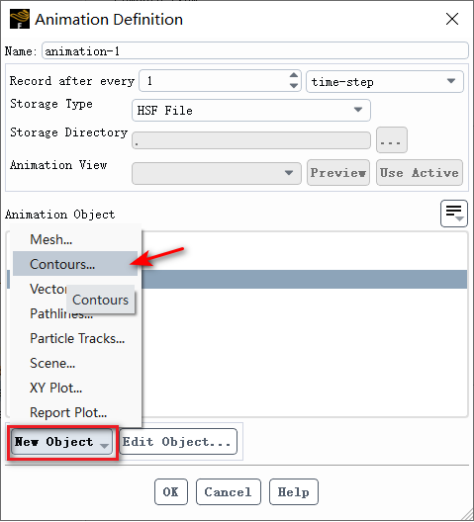
點擊new object
選擇contours…,如圖所示
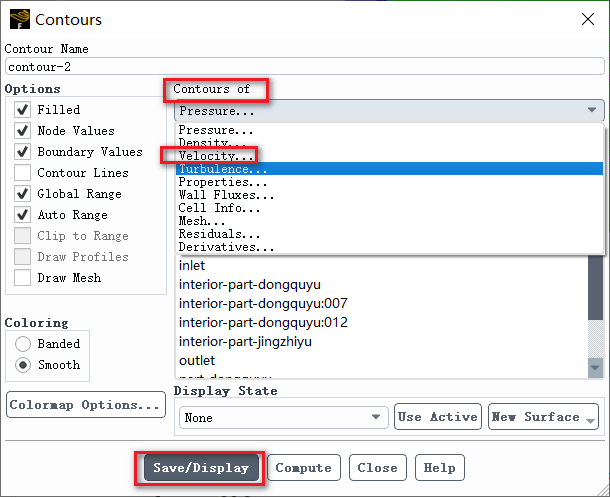
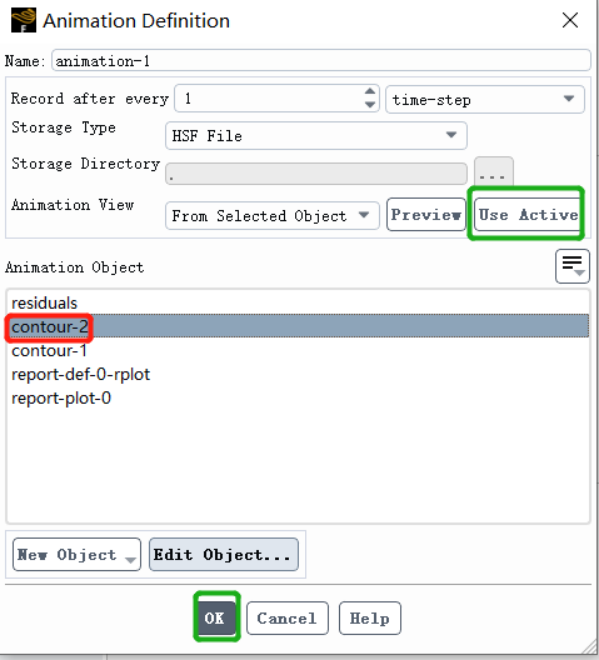
云圖Contours of 選擇 為velocity
點擊save,出現初始速度云圖
鼠標滾輪調整到合適窗口,選擇contour2,點擊use active
點擊OK
步驟十三 Run calculation
點擊左側模型樹節點Run calculation ,出現 Run calculation 面板,如圖所示。

將number of time steps 設置為需要時間步數
每一個時間步時長 time step size設置為0.01
點擊calculate,進行計算
步驟十四 查看計算結果
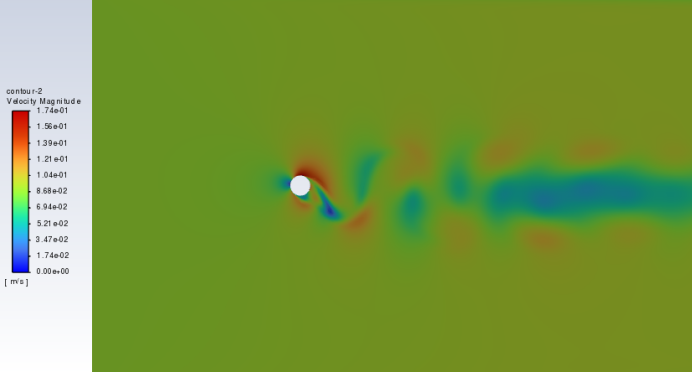
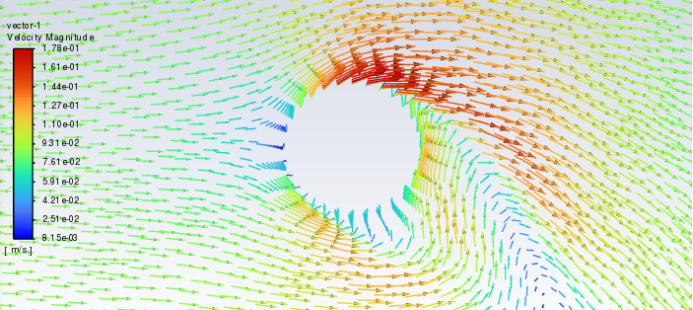
點擊模型樹Results,可查看殘差曲線、各種云圖(速度、壓力等),速度矢量圖、動畫等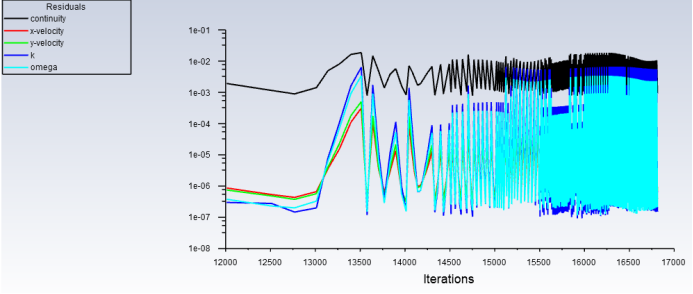
審核編輯:劉清
-
UDF
+關注
關注
0文章
4瀏覽量
6464 -
mesh模塊
+關注
關注
1文章
5瀏覽量
1399
原文標題:基于Fluent二自由度圓柱渦激振動數值模擬與應用研究
文章出處:【微信號:sim_ol,微信公眾號:模擬在線】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
DSP在六自由度電磁跟蹤系統中的應用
二自由度兩彈簧系統振動實驗設計與分析
基于單親遺傳算法二自由度PID控制器設計
SIMTEC HEXADRIVE 6自由度運動模擬平臺
二自由度內模控制方法

三自由度轉臺的設計與實現

二自由度汽車油氣懸架系統模型
風電機組如何避免渦激振動
基于Simulink的汽車2自由度模型





 工商網監
工商網監
評論