 如何使用Telegram控制樹莓派上的GPIO引腳
如何使用Telegram控制樹莓派上的GPIO引腳
電報是與樹莓派結合的最佳應用程序,用于我們所有的移動控制目的。它具有非常好的開發人員支持,并且計劃很快發布許多功能,以提高電報機器人的性能。
現在,我們將繼續下一步,學習如何使用 Telegram 控制樹莓引腳上的 GPIO 引腳,以便我們為機器人提供一些硬件支持。在本教程中,我們將四個 LED 連接到 Raspberry Pi GPIO 引腳,并使用 Telegram 中的自然語言(像聊天一樣)切換它們。聽起來很有趣吧?讓我們開始吧。
所需材料:
四個指示燈(任何顏色)
樹莓派(帶互聯網連接)
面包板
連接線
先決條件:
在繼續本教程之前,請確保您的樹莓派已連接到互聯網,并且可以在 Pi 上運行 python 程序。另請閱讀前面的教程以了解如何使用Raspberry Pi Pi設置Telegram機器人,因為我假設您熟悉這些東西以繼續進行該項目。
如果您不熟悉樹莓派,請按照我們的樹莓派介紹文章和其他樹莓派教程進行操作。
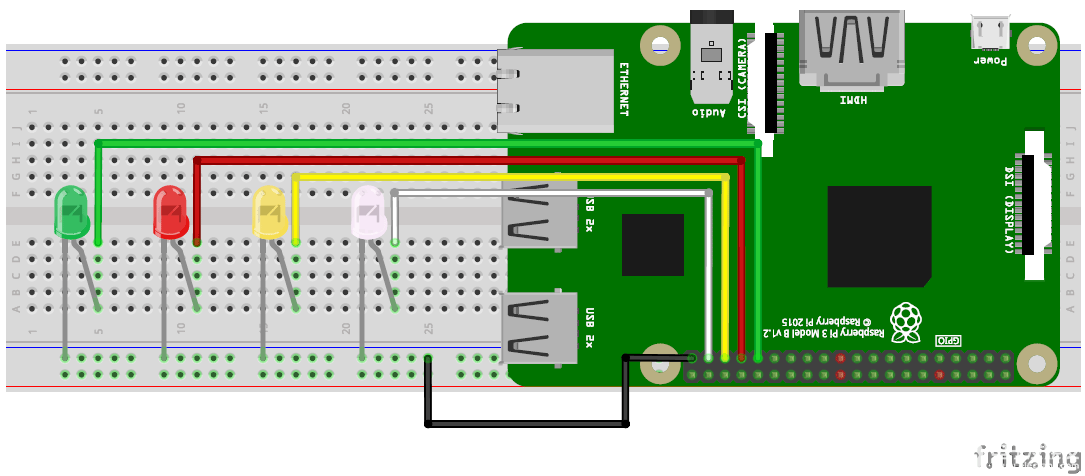
電路圖:
使用Raspberry Pi和Telegram Android應用程序控制LED的電路圖無非是四個LED和一些連接線。我們不需要限流電阻,因為Raspberry Pi GPIO引腳在3.3V TTL上工作。按照下面的電路連接您的 LED。
下表將幫助您確定連接四個 LED 的引腳編號和 GPIO 編號。
| 發光二極管端子 | 引腳編號 | 通用信息辦公室編號 |
| 綠色陽極 | 引腳 31 | GPIO 6 |
| 紅色陽極 | 引腳 33 | 通用信息總局 13 |
| 黃色陽極 | 引腳 35 | GPIO 19 |
| 白色陽極 | 引腳 37 | GPIO 26 |
| 所有四個陰極 | 引腳 39 | 地 |
下面是根據上表連接四個LED的電路圖:
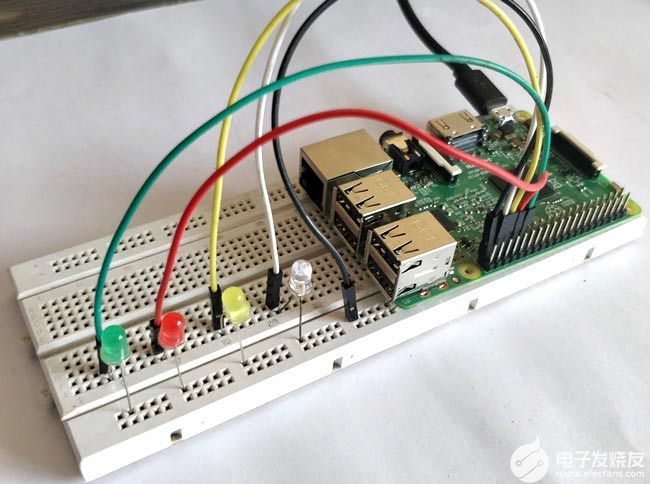
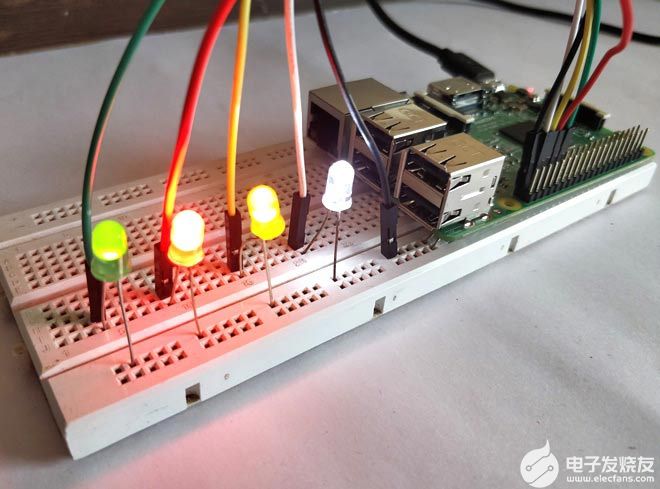
連接后,您的硬件設置應如下所示。
Raspberry Python Program:
硬件準備就緒后,我們可以繼續進行 Python 程序。在這個程序中,我們必須讀取從電報機器人發送的數據(消息)并相應地切換 LED。為了使它更自然,我們可以檢查單詞并相應地進行相應的操作,而不是檢查每個句子并在程序中對這些句子進行硬編碼。
因此,程序將主要檢查兩個單詞,它們是打開和關閉的。一旦檢測到這兩個單詞中的任何一個,它將查找其他關鍵字,如白色、黃色、綠色和紅色。僅當檢測到單詞時,才會切換相應的顏色 LED。我們還將更新檢測到的單詞的字符串,以將消息發送回電報機器人。
完整的程序可以在此頁面底部找到;就在下面,我通過將程序分解為有意義的小垃圾來解釋該程序。
為了使該程序正常工作,我們需要將telepot下載并導入到我們的樹莓派中。在我們之前的教程中,我們已經在樹莓派中下載了傳送,所以現在我們只需要將其與 GPIO 庫一起導入我們的程序,如下所示。
import RPi.GPIO as GPIO
import telepot
from telepot.loop import MessageLoop
我們將使用此程序控制 LED 燈,LED 的顏色將為白色、黃色、紅色和綠色。它們連接到電路圖所示的引腳;讓我們根據顏色定義這些LED的引腳名稱,以便在程序中使用它們。
white = 26
yellow = 19
red = 13
green = 6
下一步是將所有這些 LED 引腳定義為輸出引腳,并使用以下行將它們定義為默認關閉。
#LED White
GPIO.setup(white, GPIO.OUT)
GPIO.output(white, 0) #Off initially
#LED Yellow
GPIO.setup(yellow, GPIO.OUT)
GPIO.output(yellow, 0) #Off initially
#LED Red
GPIO.setup(red, GPIO.OUT)
GPIO.output(red, 0) #Off initially
#LED green
GPIO.setup(green, GPIO.OUT)
GPIO.output(green, 0) #Off initially
正如我們在前面的教程中學到的那樣,Raspberry 機器人必須完成的所有操作都將在函數操作中定義。在這里,我們必須讓機器人收聽從移動設備發送的消息,將其與某些關鍵字進行比較并相應地切換 LED。
對于我們從移動設備發送的每條消息,都會有一個聊天ID和命令。程序需要此聊天 ID 才能回復發件人。因此,我們保存聊天ID和消息,如下所示。
chat_id = msg['chat']['id']
command = msg['text']
現在,我們從手機發送的任何內容都將在變量命令中保存為字符串。因此,我們所要做的就是檢查此變量中的關鍵字。Python有一個命令使事情變得簡單。例如,如果我們必須檢查存儲在命令變量中的字符串中是否存在單詞“on”,我們可以簡單地使用以下行。
if 'on' in command:
同樣,我們檢查所有關鍵字,一旦收到“on”,我們繼續檢查用戶提到的顏色。這也是通過比較相同的關鍵字來使用相同的命令來完成的。我們還更新名為 message 的字符串,該字符串可以作為狀態消息回復給用戶。
if 'on' in command:
message = "Turned on "
if 'white' in command:
message = message + "white "
GPIO.output(white, 1)
if 'yellow' in command:
message = message + "yellow "
GPIO.output(yellow, 1)
if 'red' in command:
message = message + "red "
GPIO.output(red, 1)
if 'green' in command:
message = message + "green "
GPIO.output(green, 1)
if 'all' in command:
message = message + "all "
GPIO.output(white, 1)
GPIO.output(yellow, 1)
GPIO.output(red, 1)
GPIO.output(green, 1)
message = message + "light(s)"
telegram_bot.sendMessage (chat_id, message)
如上所示,我們僅查找“綠色”、“白色”、“紅色”、“黃色”和“全部”和“打開”等關鍵字。工作完成后,我們會向用戶發送一條關于剛剛發生的事情的消息。同樣的方法可以用來關燈。
if 'off' in command:
message = "Turned off "
if 'white' in command:
message = message + "white "
GPIO.output(white, 0)
if 'yellow' in command:
message = message + "yellow "
GPIO.output(yellow, 0)
if 'red' in command:
message = message + "red "
GPIO.output(red, 0)
if 'green' in command:
message = message + "green "
GPIO.output(green, 0)
if 'all' in command:
message = message + "all "
GPIO.output(white, 0)
GPIO.output(yellow, 0)
GPIO.output(red, 0)
GPIO.output(green, 0)
message = message + "light(s)"
telegram_bot.sendMessage (chat_id, message)
使用 Raspberry Pi 和 Telegram bot 控制 LED:
連接您的 LED 并在 python 上啟動您的程序。確保已更改機器人的令牌地址。并開始輸入您想要的命令。例如,要打開紅燈和黃燈,您可以使用以下命令中的任何一個。
1.開啟紅黃燈
2.打開紅色和黃色右邊
3.關于紅色和黃色
4.請亮起黃燈和紅燈
什么不是。
如您所見,機器人僅查找關鍵字,并會忽略句子中的其他單詞,這樣您就可以自然地與之交談。該項目的完整工作可以在本頁末尾的視頻中找到。
import time, datetime
import RPi.GPIO as GPIO
import telepot
from telepot.loop import MessageLoop
white = 26
yellow = 19
red = 13
green = 6
now = datetime.datetime.now()
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
#LED White
GPIO.setup(white, GPIO.OUT)
GPIO.output(white, 0) #Off initially
#LED Yellow
GPIO.setup(yellow, GPIO.OUT)
GPIO.output(yellow, 0) #Off initially
#LED Red
GPIO.setup(red, GPIO.OUT)
GPIO.output(red, 0) #Off initially
#LED green
GPIO.setup(green, GPIO.OUT)
GPIO.output(green, 0) #Off initially
def action(msg):
chat_id = msg['chat']['id']
command = msg['text']
print 'Received: %s' % command
if 'on' in command:
message = "Turned on "
if 'white' in command:
message = message + "white "
GPIO.output(white, 1)
if 'yellow' in command:
message = message + "yellow "
GPIO.output(yellow, 1)
if 'red' in command:
message = message + "red "
GPIO.output(red, 1)
if 'green' in command:
message = message + "green "
GPIO.output(green, 1)
if 'all' in command:
message = message + "all "
GPIO.output(white, 1)
GPIO.output(yellow, 1)
GPIO.output(red, 1)
GPIO.output(green, 1)
message = message + "light(s)"
telegram_bot.sendMessage (chat_id, message)
if 'off' in command:
message = "Turned off "
if 'white' in command:
message = message + "white "
GPIO.output(white, 0)
if 'yellow' in command:
message = message + "yellow "
GPIO.output(yellow, 0)
if 'red' in command:
message = message + "red "
GPIO.output(red, 0)
if 'green' in command:
message = message + "green "
GPIO.output(green, 0)
if 'all' in command:
message = message + "all "
GPIO.output(white, 0)
GPIO.output(yellow, 0)
GPIO.output(red, 0)
GPIO.output(green, 0)
message = message + "light(s)"
telegram_bot.sendMessage (chat_id, message)
telegram_bot = telepot.Bot('470583174:AAG7MPZc93qchp-tjqA_K2meRYcQiOR7X7Y')
print (telegram_bot.getMe())
MessageLoop(telegram_bot, action).run_as_thread()
print 'Up and Running....'
while 1:
time.sleep(10)
-
樹莓派
+關注
關注
116文章
1699瀏覽量
105531 -
gpio引腳
+關注
關注
0文章
7瀏覽量
2624
發布評論請先 登錄
相關推薦
樹莓派MCC118
通過Python RPi.GPIO控制樹莓派引腳
樹莓派gpio接口及編程方法
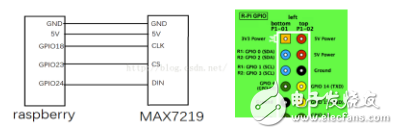
樹莓派上MAX7219的字符驅動程序編寫







 工商網監
工商網監
評論